También podría gustarte
- Uso Adecuado de EppDocumento1 páginaUso Adecuado de EppSebastianSandovalVelascoAún no hay calificaciones
- Plano Terminal-BridaDocumento1 páginaPlano Terminal-BridaSebastianSandovalVelascoAún no hay calificaciones
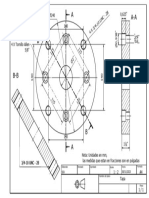
- Plano Tapa CorregidoDocumento1 páginaPlano Tapa CorregidoSebastianSandovalVelascoAún no hay calificaciones
- Car Bur AdoresDocumento17 páginasCar Bur AdoresSebastianSandovalVelascoAún no hay calificaciones
- Plano Tapa CorregidoDocumento1 páginaPlano Tapa CorregidoSebastianSandovalVelascoAún no hay calificaciones
- Plano Eje RotorDocumento1 páginaPlano Eje RotorSebastianSandovalVelascoAún no hay calificaciones
- Plano MotorDocumento1 páginaPlano MotorSebastianSandovalVelascoAún no hay calificaciones
- Parcial 2 FinitosDocumento19 páginasParcial 2 FinitosSebastianSandovalVelascoAún no hay calificaciones
- 4 - Bancada (Plano de Soldadura)Documento1 página4 - Bancada (Plano de Soldadura)SebastianSandovalVelascoAún no hay calificaciones
- Taller Problema Par Metros Sebastian SandovalDocumento3 páginasTaller Problema Par Metros Sebastian SandovalSebastianSandovalVelascoAún no hay calificaciones
- Taller 1 Elementos FinitosDocumento13 páginasTaller 1 Elementos FinitosSebastianSandovalVelascoAún no hay calificaciones
- Mezcladora de CintasDocumento39 páginasMezcladora de CintasSebastianSandovalVelasco100% (2)
- Ecuaciones Redes NeuronalesDocumento1 páginaEcuaciones Redes NeuronalesSebastianSandovalVelascoAún no hay calificaciones
- Informe AnalogíaDocumento6 páginasInforme AnalogíaSebastianSandovalVelascoAún no hay calificaciones
- Propuesta Proyecto Fundamentos de ControlDocumento4 páginasPropuesta Proyecto Fundamentos de ControlSebastianSandovalVelascoAún no hay calificaciones
- Simulacion PIDDocumento3 páginasSimulacion PIDSebastianSandovalVelascoAún no hay calificaciones
- AletasDocumento32 páginasAletaskarla pedrozo gonzalezAún no hay calificaciones
- Algoritmo Engranajes Helicoidales1Documento7 páginasAlgoritmo Engranajes Helicoidales1SebastianSandovalVelascoAún no hay calificaciones
- Diagrama de GanttDocumento1 páginaDiagrama de GanttSebastianSandovalVelascoAún no hay calificaciones
- Termometro BP13Documento2 páginasTermometro BP13Pedro DiazAún no hay calificaciones
- Tablas en LatexDocumento37 páginasTablas en Latexwls70053060Aún no hay calificaciones
- Pre-Informe PR Actica PIDDocumento3 páginasPre-Informe PR Actica PIDSebastianSandovalVelascoAún no hay calificaciones
- Libro ProgramacionDocumento2 páginasLibro ProgramacionSebastianSandovalVelascoAún no hay calificaciones
- Charla Patada A La Escalera Ha-Joon ChangDocumento28 páginasCharla Patada A La Escalera Ha-Joon ChangAsamblea De Majaras100% (1)
- Análisis de Aceleración de Un Mecanismo (Método Gráfico) : Mecanismos 2018-IDocumento16 páginasAnálisis de Aceleración de Un Mecanismo (Método Gráfico) : Mecanismos 2018-ISebastianSandovalVelascoAún no hay calificaciones
- IEEE Journal Paper TemplateDocumento4 páginasIEEE Journal Paper TemplateSebastianSandovalVelascoAún no hay calificaciones
- Elevacion ManualDocumento8 páginasElevacion ManualSebastianSandovalVelascoAún no hay calificaciones
- Libro Programacion PDFDocumento263 páginasLibro Programacion PDFemi10Aún no hay calificaciones
- Metodos de Control de Calidad de Cañerias y Tuberias de PerforacionDocumento4 páginasMetodos de Control de Calidad de Cañerias y Tuberias de Perforacionfin2014Aún no hay calificaciones