También podría gustarte
- Procedimientos VFRDocumento7 páginasProcedimientos VFRAngel CarreroAún no hay calificaciones
- VTGDocumento34 páginasVTGC Maxwell Hernandez100% (2)
- # Ansi RelesDocumento2 páginas# Ansi RelesOmar HernándezAún no hay calificaciones
- Monografia Terminada de Sig.Documento30 páginasMonografia Terminada de Sig.JAVIER LINARES URQUIZA100% (1)
- Organización Celular 1Documento17 páginasOrganización Celular 1koAún no hay calificaciones
- Hablemos de AcordesDocumento55 páginasHablemos de AcordesmaleguiAún no hay calificaciones
- Infiltracion en El Suelo 2 LISTO PARA IMPRIMIRDocumento36 páginasInfiltracion en El Suelo 2 LISTO PARA IMPRIMIRroger morales lazaroAún no hay calificaciones
- Setting Tool and Fixture Offswets On The FadalDocumento1 páginaSetting Tool and Fixture Offswets On The FadalBrayan Blanco MontesAún no hay calificaciones
- Examen Teoría Del Fuego Master DDocumento10 páginasExamen Teoría Del Fuego Master DarreburraAún no hay calificaciones
- Polarización: - Polarización Lineal (Horizontal y Vertical) - Polarización Circular (Izquierda y Derecha)Documento5 páginasPolarización: - Polarización Lineal (Horizontal y Vertical) - Polarización Circular (Izquierda y Derecha)koAún no hay calificaciones
- Pat 17Documento115 páginasPat 17koAún no hay calificaciones
- Solucionario de Práctica DomiciliariaDocumento7 páginasSolucionario de Práctica DomiciliariaJuan SPAún no hay calificaciones
- Laboratorio 01 Prueba F Control DigitalDocumento4 páginasLaboratorio 01 Prueba F Control DigitalkoAún no hay calificaciones
- Arduino Due Agosoto-2018-Tarea1Documento6 páginasArduino Due Agosoto-2018-Tarea1koAún no hay calificaciones
- Final Laboratorio #1Documento1 páginaFinal Laboratorio #1koAún no hay calificaciones
- Investigacion Del Amplificador OperacionalDocumento3 páginasInvestigacion Del Amplificador OperacionalkoAún no hay calificaciones
- Calculo Transformador Tap-CenDocumento8 páginasCalculo Transformador Tap-CenAlexis AraujoAún no hay calificaciones
- 1er Lab CEII 2018 A PDFDocumento4 páginas1er Lab CEII 2018 A PDFkoAún no hay calificaciones
- Fisica 3 - Examenes PasadosDocumento33 páginasFisica 3 - Examenes PasadoskoAún no hay calificaciones
- Compartimos Puntos de Vista Sobre El Siglo XVIIDocumento11 páginasCompartimos Puntos de Vista Sobre El Siglo XVIINieves Bazan la TorreAún no hay calificaciones
- 1722-It Ingenieria Race, CA - FanatrailerDocumento7 páginas1722-It Ingenieria Race, CA - FanatrailerAlexis PradoAún no hay calificaciones
- CANTERIADocumento4 páginasCANTERIAIng Maut Eduardo RomoAún no hay calificaciones
- Ciclo de Mejoramiento AmbientalDocumento5 páginasCiclo de Mejoramiento AmbientalMauricio Burgos SanchezAún no hay calificaciones
- Curriculum Viate Word Actual 2023Documento9 páginasCurriculum Viate Word Actual 2023Gabriel IbarraAún no hay calificaciones
- 5.1 Lentes-Y-Prismas-2Documento6 páginas5.1 Lentes-Y-Prismas-2Su C. SalasAún no hay calificaciones
- Cartilla de Oxigenoterapia DomiciliariaDocumento35 páginasCartilla de Oxigenoterapia DomiciliariaADOLFO MARTINEZAún no hay calificaciones
- Rúbrica Informe TécnicoDocumento1 páginaRúbrica Informe TécnicoCarlos StevenAún no hay calificaciones
- Control de VibracionesDocumento12 páginasControl de VibracionescholotaAún no hay calificaciones
- Ing. Jonas David Negretty Metodologia de La Investigacion: Estudio Sobre La Fuerza de Paredes de Barro CompactadoDocumento1 páginaIng. Jonas David Negretty Metodologia de La Investigacion: Estudio Sobre La Fuerza de Paredes de Barro CompactadoEddy M CuellarAún no hay calificaciones
- Huaro +unopsDocumento2 páginasHuaro +unopsJairo Vigo ReyesAún no hay calificaciones
- Aprueban Reglamento de Supervisión Ambiental de La MunicipalidadDocumento2 páginasAprueban Reglamento de Supervisión Ambiental de La MunicipalidadFidel Francisco Quispe HinostrozaAún no hay calificaciones
- Manual Linea-1 12 Bomba Doble SuccionDocumento14 páginasManual Linea-1 12 Bomba Doble SuccionSebastian Matias CruzAún no hay calificaciones
- Segundo Examen Parcial-Recup - 2020Documento2 páginasSegundo Examen Parcial-Recup - 2020cristianprocopio07Aún no hay calificaciones
- Tarea Efecto DopplerDocumento4 páginasTarea Efecto DopplerGeanella SuárezAún no hay calificaciones
- Central de Incendios IRIS (TRUEBA CINE)Documento88 páginasCentral de Incendios IRIS (TRUEBA CINE)ParvuAún no hay calificaciones
- Capitulo 25 Booster WWBDocumento7 páginasCapitulo 25 Booster WWBemanuel92Aún no hay calificaciones
- Maquinaria de CosechaDocumento15 páginasMaquinaria de CosechaFlayser Campos GuillénAún no hay calificaciones
- Proyecto de Implementaciön de Banda de MúsicaDocumento14 páginasProyecto de Implementaciön de Banda de MúsicajoseAún no hay calificaciones
- TA EEC-GNV Manual Del Instalador 5°generacion 2023-7Documento28 páginasTA EEC-GNV Manual Del Instalador 5°generacion 2023-7onepieceeternAún no hay calificaciones
- RESUMEN Pronostico ConceptoDocumento3 páginasRESUMEN Pronostico ConceptoLeidyAlejandraSalcedoRinconAún no hay calificaciones
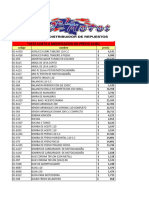
- Lista Angel Motos Actualizada Al 27-12-23 PDF ExcelDocumento10 páginasLista Angel Motos Actualizada Al 27-12-23 PDF ExcelChristian RodriguezAún no hay calificaciones