También podría gustarte
- Funciones de Teniente GobernadorDocumento7 páginasFunciones de Teniente GobernadorMilydiaz75% (4)
- 36.-Modelo de Escrito Solicitando Rehabilitación en Delito de Omisión A La Asistencia FamiliarDocumento2 páginas36.-Modelo de Escrito Solicitando Rehabilitación en Delito de Omisión A La Asistencia FamiliarBrinsley Alonso Mayorga Gamboa100% (4)
- Acuerdo Gubernativo 188-2013 (Oposición)Documento3 páginasAcuerdo Gubernativo 188-2013 (Oposición)riocas100% (2)
- 01 Análisis de CCDocumento18 páginas01 Análisis de CCJogarelAún no hay calificaciones
- 3 Peritaje ContableDocumento21 páginas3 Peritaje ContableRoberto Tapia RubioAún no hay calificaciones
- Control de Procesos Quimicos ContenidoDocumento4 páginasControl de Procesos Quimicos ContenidoJennifer JohnsonAún no hay calificaciones
- Ejemplo Plan GlobalDocumento7 páginasEjemplo Plan GlobalJennifer JohnsonAún no hay calificaciones
- Solo Contenido Control de Instrumentacion de Procesos QuimicosDocumento2 páginasSolo Contenido Control de Instrumentacion de Procesos QuimicosJennifer JohnsonAún no hay calificaciones
- LibrosDocumento13 páginasLibrosJennifer JohnsonAún no hay calificaciones
- Control Avanzado Procesos QuimicosDocumento5 páginasControl Avanzado Procesos QuimicosJennifer JohnsonAún no hay calificaciones
- Temario DinamicaDocumento8 páginasTemario DinamicaJennifer JohnsonAún no hay calificaciones
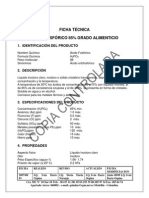
- Acido Fosforico 85Documento5 páginasAcido Fosforico 85Jennifer JohnsonAún no hay calificaciones
- 1 Seguridad Hospital Viedma PDFDocumento84 páginas1 Seguridad Hospital Viedma PDFJennifer Johnson100% (2)
- Presentación No. 10 Comercio Internacional 2023 PDFDocumento77 páginasPresentación No. 10 Comercio Internacional 2023 PDFosman castroAún no hay calificaciones
- Boletín Oficial - 2016-02-17 - 2º SecciónDocumento20 páginasBoletín Oficial - 2016-02-17 - 2º SecciónOndRechTacLetMovAún no hay calificaciones
- F.1.3 Catalago GRL Val KitzDocumento3 páginasF.1.3 Catalago GRL Val Kitzlorenzo fcoAún no hay calificaciones
- Canalizaciones INSTALACIONES ELÉCTRICASDocumento3 páginasCanalizaciones INSTALACIONES ELÉCTRICASSARA MAGDALENA MARTINEZ OLAVEAún no hay calificaciones
- Niif 3Documento14 páginasNiif 3Cristian TucoAún no hay calificaciones
- Catálogo Tuberías y Accesorios Aceros AltavistaDocumento12 páginasCatálogo Tuberías y Accesorios Aceros AltavistaGuadalupe Correa CruzAún no hay calificaciones
- Mapa Mental AlpinaDocumento1 páginaMapa Mental AlpinaHector MeloAún no hay calificaciones
- Balance General - Entregable 1Documento4 páginasBalance General - Entregable 1Magdiel Alvarez GarcíaAún no hay calificaciones
- Julio - Chaverra DiagramaDocumento1 páginaJulio - Chaverra DiagramaMelissa PlzsAún no hay calificaciones
- Tema Costos EstimadosDocumento5 páginasTema Costos EstimadosCiriaco Genaro Lopez BenitoAún no hay calificaciones
- Segunda Unidad Diseño de Elemento de AceroDocumento23 páginasSegunda Unidad Diseño de Elemento de AceroadrianAún no hay calificaciones
- Ensamble y DesensambleDocumento5 páginasEnsamble y DesensambleCarolina Londoño IdárragaAún no hay calificaciones
- Perpetuidad Valoracion Empresas Acciones Oct 2018Documento2 páginasPerpetuidad Valoracion Empresas Acciones Oct 2018javier6andr6s6romeroAún no hay calificaciones
- Informe-Preliminar-Ssu - RS Vii - FinalllDocumento21 páginasInforme-Preliminar-Ssu - RS Vii - FinallljhonAún no hay calificaciones
- Diseños de Prótesis ParcialDocumento6 páginasDiseños de Prótesis ParcialMatangalangaAún no hay calificaciones
- TESIS Pallares Ashly y Vasquez JonatanDocumento80 páginasTESIS Pallares Ashly y Vasquez JonatanEdgar Cuyubamba CasasAún no hay calificaciones
- Ficha Motobomba Kipor KDP30Documento2 páginasFicha Motobomba Kipor KDP30Adrian CastilloAún no hay calificaciones
- ANEX T4 Per Imprimir PDFDocumento15 páginasANEX T4 Per Imprimir PDFCarla Sarlé MarradesAún no hay calificaciones
- Cuestionario de Preguntas Sobre Marco Conceptual de La Resolución 1409 Del 2012Documento3 páginasCuestionario de Preguntas Sobre Marco Conceptual de La Resolución 1409 Del 2012Tatiss BolañosAún no hay calificaciones
- Act1 Uni3 PDFDocumento2 páginasAct1 Uni3 PDFKasandra Delgado PerezAún no hay calificaciones
- AA3 Formular El Objeto de Investigación de Mercados Que Permita Establecer Las Necesidades y Problemas Del EntornoDocumento24 páginasAA3 Formular El Objeto de Investigación de Mercados Que Permita Establecer Las Necesidades y Problemas Del EntornoWILSON CERQUERAAún no hay calificaciones
- Estados Financieros BavariaDocumento4 páginasEstados Financieros BavariaVivi UrregoAún no hay calificaciones
- MSC.1-Circ.1253 - Manuales Técnicos Operaciones - Mantenimiento A Bordo - IGS - 2007Documento2 páginasMSC.1-Circ.1253 - Manuales Técnicos Operaciones - Mantenimiento A Bordo - IGS - 2007Agus BorneoAún no hay calificaciones
- Examen Und 3 Gestión de Tecnologia Leydi RiosDocumento7 páginasExamen Und 3 Gestión de Tecnologia Leydi RiosYolima LazcanoAún no hay calificaciones
- Taller Pyg Perfecto para EnsayarDocumento7 páginasTaller Pyg Perfecto para EnsayarFabio Jose RengifoAún no hay calificaciones