También podría gustarte
- El Cristianismo PDFDocumento220 páginasEl Cristianismo PDFtriunfadorforever100% (4)
- Procesos Adaptativos y Mecanismos MentalesDocumento50 páginasProcesos Adaptativos y Mecanismos MentalesWSteven DiazAún no hay calificaciones
- Dietas HospitalariasDocumento16 páginasDietas HospitalariasHeidy LauraAún no hay calificaciones
- Manuak Completo NordsonDocumento170 páginasManuak Completo NordsonDavid Hawkins100% (1)
- Ejercicios Corte ReflexionDocumento7 páginasEjercicios Corte ReflexionJose Manuel Mendoza PAún no hay calificaciones
- Metodología de Trabajo Con Las Niñas y Niños Preescolares - Leonor CerdaDocumento260 páginasMetodología de Trabajo Con Las Niñas y Niños Preescolares - Leonor Cerdakamipipo100% (4)
- Aplicacion de Las Transformaciones LinealesDocumento3 páginasAplicacion de Las Transformaciones LinealesgandiariasAún no hay calificaciones
- Ejemplos de Aplicaciones de Las Transformaciones LinealesDocumento5 páginasEjemplos de Aplicaciones de Las Transformaciones LinealesJesus Gonzalez Marin59% (17)
- Transformaciones LinealesDocumento12 páginasTransformaciones LinealesAdrián Fernández100% (1)
- Moldes Auditivos 2014Documento54 páginasMoldes Auditivos 2014Carmen Gloria Romero GonzálezAún no hay calificaciones
- Unidad 5 Transformaciones LinealesDocumento16 páginasUnidad 5 Transformaciones LinealesMiathzireri Reyes100% (1)
- Avenidas MaximasDocumento11 páginasAvenidas MaximasMauricio CalvoAún no hay calificaciones
- José Emilio PACHECODocumento24 páginasJosé Emilio PACHECOAlan Carrasco MezaAún no hay calificaciones
- 2.6 Representación Matricial de Transformaciones TridimensionalesDocumento34 páginas2.6 Representación Matricial de Transformaciones TridimensionalesGerardo PlataAún no hay calificaciones
- Examen5 AlgebraDocumento4 páginasExamen5 AlgebravaleriaAún no hay calificaciones
- Aplicación de Las Transformaciones Lineales 2Documento17 páginasAplicación de Las Transformaciones Lineales 2Alejandra Perez LaraaAún no hay calificaciones
- Aplicación de Las Transformaciones LinealesDocumento6 páginasAplicación de Las Transformaciones LinealesGaBo PatiñoAún no hay calificaciones
- Introduccion A Las Transformaciones LienealesDocumento4 páginasIntroduccion A Las Transformaciones LienealesGreeg Eagle'r100% (1)
- Unidad 5 Transformaciones LinealesDocumento20 páginasUnidad 5 Transformaciones LinealesIsrael SantanaAún no hay calificaciones
- Algebra Linean ITEDocumento8 páginasAlgebra Linean ITEAdriano A. VNAún no hay calificaciones
- Transformaciones LinealesDocumento16 páginasTransformaciones LinealesARATH MAURICIO FEDERICO IBARRAAún no hay calificaciones
- 5Documento7 páginas5Areli Cervantes OlguinAún no hay calificaciones
- Teorías en Cálculo DiferencialDocumento9 páginasTeorías en Cálculo DiferencialDANIELAún no hay calificaciones
- Isometría y HomoteciaDocumento10 páginasIsometría y HomoteciaAcademia Patinaje NULLAMAún no hay calificaciones
- Aplicación de Las Transformaciones LinealesDocumento14 páginasAplicación de Las Transformaciones LinealesVela Santiago VianeyAún no hay calificaciones
- Unidad 4Documento8 páginasUnidad 4Ana ToledoAún no hay calificaciones
- Expo AlgebraDocumento14 páginasExpo AlgebraDaniela TrujilloAún no hay calificaciones
- AlgebraDocumento7 páginasAlgebraJuanVargasAún no hay calificaciones
- INVESTIGACIONDocumento2 páginasINVESTIGACIONAlexis Rubicel Méndez JiménezAún no hay calificaciones
- Nadia Fernandez P.FORMATIVO C5Documento32 páginasNadia Fernandez P.FORMATIVO C5NadiaAún no hay calificaciones
- T4 Inv Transformaciones LinealesDocumento10 páginasT4 Inv Transformaciones LinealesSamuel Spankin LeónAún no hay calificaciones
- Transformaciones LinealesDocumento9 páginasTransformaciones LinealesJosue ChavezAún no hay calificaciones
- Leccion 2 Geometria FinalDocumento17 páginasLeccion 2 Geometria FinalPedro Pablo Vilches CaballeroAún no hay calificaciones
- Aplicación de Las Transformaciones LinealesDocumento3 páginasAplicación de Las Transformaciones LinealesJose DiazAún no hay calificaciones
- Tarea 6 Matematica InicialDocumento10 páginasTarea 6 Matematica InicialArieli DominguezAún no hay calificaciones
- Teoria de Transformaciones LinealesDocumento9 páginasTeoria de Transformaciones LinealesMingo DaviilaAún no hay calificaciones
- Transformaciones Lineales TrabajoDocumento12 páginasTransformaciones Lineales TrabajoDaniel De Lara100% (1)
- UntitledDocumento5 páginasUntitledSANDRA MARTINEZAún no hay calificaciones
- 5.4 Aplicaciones de Las TransformacionesDocumento2 páginas5.4 Aplicaciones de Las TransformacionesRamírez Aquino Jesús FelipeAún no hay calificaciones
- Representacion Matricial de Transformaciones Tri Dimension AlesDocumento2 páginasRepresentacion Matricial de Transformaciones Tri Dimension AlesAnaa Arviizu100% (1)
- CUESTIONARIODocumento9 páginasCUESTIONARIOYESSENIA MICHELLE VISCARRA VELIZAún no hay calificaciones
- Cap 2, Vectores en El Espacio IDocumento63 páginasCap 2, Vectores en El Espacio IAnabel TorresAún no hay calificaciones
- Algebra LinealDocumento9 páginasAlgebra LinealKassandra PQAún no hay calificaciones
- Tipos de Transformaciones LinealesDocumento51 páginasTipos de Transformaciones LinealesLilith ReyesAún no hay calificaciones
- GE-HT - Semana 7 - Aplicaciones de Las Transformaciones LinealesDocumento6 páginasGE-HT - Semana 7 - Aplicaciones de Las Transformaciones Linealessofia mendozaAún no hay calificaciones
- Transformaciones LinealesDocumento15 páginasTransformaciones LinealesAdilene ValenzuelaAún no hay calificaciones
- Unidad 5, AlgebraDocumento10 páginasUnidad 5, AlgebraDanna Chan SansoresAún no hay calificaciones
- Deber Investigacion 01 - Magallanes Julio-G4Documento12 páginasDeber Investigacion 01 - Magallanes Julio-G4daniel magallanesAún no hay calificaciones
- Reporte Unidad 5Documento10 páginasReporte Unidad 5Ezequiel obet Rasgado HernándezAún no hay calificaciones
- Núcleo e Imagen de Una Transformación LinealDocumento14 páginasNúcleo e Imagen de Una Transformación LinealGABRIEL AGUILAR RAMIREZAún no hay calificaciones
- Superficies Cónicas - Tarea Nº1Documento4 páginasSuperficies Cónicas - Tarea Nº1Karl Rosales JeronimoAún no hay calificaciones
- Lectura 7 CM1Documento5 páginasLectura 7 CM1Viridiana HernandezAún no hay calificaciones
- MEMORIADocumento9 páginasMEMORIAdaniel magallanesAún no hay calificaciones
- 6 Práctico Transformaciones IsométricasDocumento5 páginas6 Práctico Transformaciones Isométricasbrenda paola cortes vegaAún no hay calificaciones
- GeometriaDocumento8 páginasGeometriaJavier Toribio RuizAún no hay calificaciones
- InvestigacionesDocumento9 páginasInvestigacionesFabian FraustoAún no hay calificaciones
- Figuras CónicasDocumento17 páginasFiguras CónicasCesar MolinaAún no hay calificaciones
- Aplicaciones de Las Transformaciones LinealesDocumento2 páginasAplicaciones de Las Transformaciones LinealesGusanito guason0% (1)
- Mapa Conceptual 5 UnidadDocumento2 páginasMapa Conceptual 5 UnidadJefferson Herzael Mar CastellanosAún no hay calificaciones
- Área de Una Región Plana y Volumen de Un Sólido en Revolución. Matematica IIDocumento26 páginasÁrea de Una Región Plana y Volumen de Un Sólido en Revolución. Matematica IIAlejandro VasquezAún no hay calificaciones
- PalominoDocumento2 páginasPalominoRichi RichiAún no hay calificaciones
- Definición de Transformación LinealDocumento120 páginasDefinición de Transformación LinealEmanuel MartinezAún no hay calificaciones
- Método de La Transformada InversaDocumento2 páginasMétodo de La Transformada InversaJEM IncAún no hay calificaciones
- Cuestionario de VectorialDocumento15 páginasCuestionario de VectorialIvan AsumasaAún no hay calificaciones
- Transformaciones LinealesDocumento7 páginasTransformaciones LinealesJONATANAún no hay calificaciones
- Proyección isométrica: Explorando la percepción espacial en la visión por computadoraDe EverandProyección isométrica: Explorando la percepción espacial en la visión por computadoraAún no hay calificaciones
- Transformacion afin: Desbloqueo de perspectivas visuales: exploración de la transformación afín en visión por computadoraDe EverandTransformacion afin: Desbloqueo de perspectivas visuales: exploración de la transformación afín en visión por computadoraAún no hay calificaciones
- Gráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraDe EverandGráficos por computadora bidimensionales: Explorando el ámbito visual: gráficos por computadora bidimensionales en visión por computadoraAún no hay calificaciones
- Comunicación Ambiental 2.0Documento59 páginasComunicación Ambiental 2.0Lyda Consuelo Rojas RuizAún no hay calificaciones
- Denotación y ConnotaciónDocumento3 páginasDenotación y ConnotaciónByron TúnchezAún no hay calificaciones
- Antimicoticos TopicosDocumento8 páginasAntimicoticos TopicosJoe Almeyda MagallanesAún no hay calificaciones
- Grupo S-Tarea3.1.1Documento113 páginasGrupo S-Tarea3.1.1Ricardo OlmedoAún no hay calificaciones
- Guia Del Postulante - 2022Documento35 páginasGuia Del Postulante - 2022Marvin Rueda SarangoAún no hay calificaciones
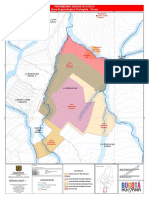
- Mapa Usme IDPC Areas ProtegidasDocumento1 páginaMapa Usme IDPC Areas ProtegidasYeinner Andres Lopez NarvaezAún no hay calificaciones
- Control Genético de La Síntesis Proteica - FisiologíaDocumento20 páginasControl Genético de La Síntesis Proteica - Fisiologíaisaily fernándezAún no hay calificaciones
- Operaciones Con PolinomiosDocumento4 páginasOperaciones Con PolinomiosAnonymous HdENZfRAún no hay calificaciones
- Act-3 Evaluación de La DistanciaDocumento12 páginasAct-3 Evaluación de La DistanciafuamencioAún no hay calificaciones
- Funciones Polinomiales y Sus GráficasDocumento13 páginasFunciones Polinomiales y Sus GráficasJorgee Luna ElCasperAún no hay calificaciones
- NanocelulosaDocumento6 páginasNanocelulosaKeissy San MartínAún no hay calificaciones
- Anexo 1 Ejercicios Tarea 4Documento18 páginasAnexo 1 Ejercicios Tarea 4Milena SalazarAún no hay calificaciones
- Doctrinas Éticas.Documento15 páginasDoctrinas Éticas.Andres Manuel Lopez ObradorAún no hay calificaciones
- ¿Cuándo Vendrá El Reino de Dios - ¿Cuándo Gobernará La TierraDocumento4 páginas¿Cuándo Vendrá El Reino de Dios - ¿Cuándo Gobernará La TierraBRYANNMAún no hay calificaciones
- ÁMBITO Cientifico Tecnologico Bloque 2Documento36 páginasÁMBITO Cientifico Tecnologico Bloque 2inesAún no hay calificaciones
- EjerciciosnjerarquiasnPOO 83645a6ae5837c6Documento4 páginasEjerciciosnjerarquiasnPOO 83645a6ae5837c6Pipe DoradoAún no hay calificaciones
- Tipos de CristalizadoresDocumento7 páginasTipos de CristalizadoresJorge Bahena ArteagaAún no hay calificaciones
- Proyecto Agosto - 64932 - BDocumento12 páginasProyecto Agosto - 64932 - BVictor Andres Mateo SanchezAún no hay calificaciones
- Boletín MRU Y MRUA UD1Documento3 páginasBoletín MRU Y MRUA UD1samupont13Aún no hay calificaciones
- Geográfica Del Perú 05Documento24 páginasGeográfica Del Perú 05estefani fiorella coapaza aguilarAún no hay calificaciones
- Equipos Promocion AgostoDocumento2 páginasEquipos Promocion AgostoDiego ChungandroAún no hay calificaciones
- Unidad 5 de Sistemas Operativos IDocumento12 páginasUnidad 5 de Sistemas Operativos IHernández Cortés Jade DainaraAún no hay calificaciones