También podría gustarte
- Monografia de Mantenimiento 2Documento288 páginasMonografia de Mantenimiento 2Luis RossoAún no hay calificaciones
- Lámina 2 Rosso LuisDocumento4 páginasLámina 2 Rosso LuisLuis RossoAún no hay calificaciones
- MT233 A P1 20182TDocumento3 páginasMT233 A P1 20182TLuis RossoAún no hay calificaciones
- Gestion de La Calidad Instrucciones Monografia 2021 1Documento3 páginasGestion de La Calidad Instrucciones Monografia 2021 1Luis RossoAún no hay calificaciones
- Monografia FinalDocumento13 páginasMonografia FinalLuis RossoAún no hay calificaciones
- Examen Final MT 242 2020-1-Rosso - Ramos - Luis - EnriqueDocumento11 páginasExamen Final MT 242 2020-1-Rosso - Ramos - Luis - EnriqueLuis RossoAún no hay calificaciones
- P EHB 07 Lab 06 DOLORIERT RALF Archivo PDFDocumento3 páginasP EHB 07 Lab 06 DOLORIERT RALF Archivo PDFLuis RossoAún no hay calificaciones
- Solucion Vibra General Prob 2Documento1 páginaSolucion Vibra General Prob 2JUAN DANIEL VASQUEZ RENGIFOAún no hay calificaciones
- Solucion Prob 11 Excitacion PDFDocumento1 páginaSolucion Prob 11 Excitacion PDFLuis RossoAún no hay calificaciones
- Respuesta Impulsiva 2020-IDocumento5 páginasRespuesta Impulsiva 2020-IJUAN DANIEL VASQUEZ RENGIFOAún no hay calificaciones
- Problemas Sobre Vibraciones Generalizadas: Vibración Debido A Fuerzas ImpulsivasDocumento5 páginasProblemas Sobre Vibraciones Generalizadas: Vibración Debido A Fuerzas ImpulsivasJUAN DANIEL VASQUEZ RENGIFOAún no hay calificaciones
- 9 Ecuaciones Diferenciales OrdinariasDocumento93 páginas9 Ecuaciones Diferenciales OrdinariasDeydaraTorresAún no hay calificaciones
- SOLUCION PROB 5 - PD3 2da PARTEDocumento2 páginasSOLUCION PROB 5 - PD3 2da PARTELuis RossoAún no hay calificaciones
- 9 Ecuaciones Diferenciales OrdinariasDocumento93 páginas9 Ecuaciones Diferenciales OrdinariasDeydaraTorresAún no hay calificaciones
- Mecanica de Fluidos 2 - Ugarte PDFDocumento231 páginasMecanica de Fluidos 2 - Ugarte PDFYojan Andre Martinez Pucuhuayla100% (7)
- Cap 01Documento39 páginasCap 01IiOna GpAún no hay calificaciones
- Ensayo de Arena Mi BroDocumento24 páginasEnsayo de Arena Mi BroLuis RossoAún no hay calificaciones
- Ensayo de Arena Mi BroDocumento24 páginasEnsayo de Arena Mi BroLuis RossoAún no hay calificaciones
- CVDocumento1 páginaCVLuis RossoAún no hay calificaciones
- Cap 01Documento39 páginasCap 01IiOna GpAún no hay calificaciones
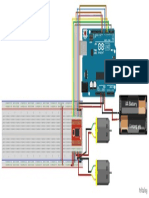
- FritzingDocumento1 páginaFritzingLuis RossoAún no hay calificaciones
- Laboratorio de Análisis de Moldeo y ColadaDocumento14 páginasLaboratorio de Análisis de Moldeo y ColadaAnonymous 1tskC3GV8Aún no hay calificaciones
- Flip FlopDocumento1 páginaFlip FlopLuis RossoAún no hay calificaciones
- Proyecto MT127Documento4 páginasProyecto MT127Luis RossoAún no hay calificaciones
- PAICHEDocumento40 páginasPAICHELuis RossoAún no hay calificaciones
- Bioquimica Ambiental 1Documento3 páginasBioquimica Ambiental 1Luis RossoAún no hay calificaciones
- Sillon PlegableDocumento2 páginasSillon PlegableLuis RossoAún no hay calificaciones
- Caratula para Maquinas ElectricasDocumento1 páginaCaratula para Maquinas ElectricasLuis RossoAún no hay calificaciones
- Informes Trabajo PapaDocumento2 páginasInformes Trabajo PapaLuis RossoAún no hay calificaciones