También podría gustarte
- Puente de HiloDocumento4 páginasPuente de Hilohansi21950% (1)
- Manual Inventor 2015 - Nivel 1 - LaboratorioDocumento98 páginasManual Inventor 2015 - Nivel 1 - Laboratoriomarvin candrayAún no hay calificaciones
- Practica Laboratorio Motor TrifásicoDocumento2 páginasPractica Laboratorio Motor TrifásicoJUAN DAVID FONSECA ORTIZAún no hay calificaciones
- Informe de Laboratorio Lector de Frecuencia - TacometroDocumento9 páginasInforme de Laboratorio Lector de Frecuencia - TacometroChistian SanchezAún no hay calificaciones
- AnalisisEstatico SolidWorks PDFDocumento66 páginasAnalisisEstatico SolidWorks PDFendraAún no hay calificaciones
- Mdm001 Dired Cálculo Eléctrico BTDocumento12 páginasMdm001 Dired Cálculo Eléctrico BTVictor Felipe Domínguez MaloAún no hay calificaciones
- Comportamiento Del DiodoDocumento6 páginasComportamiento Del DiodoMaritzaAún no hay calificaciones
- Laboratorio 9 - HisteresisDocumento9 páginasLaboratorio 9 - HisteresisJA JBAún no hay calificaciones
- Laboratorio 6 Maquinas Eléctricas 2Documento5 páginasLaboratorio 6 Maquinas Eléctricas 2Mark OnofreAún no hay calificaciones
- Interruptores TermoelectricosDocumento16 páginasInterruptores TermoelectricosTiffani EgoávilAún no hay calificaciones
- Taller ElectroneumaticaDocumento6 páginasTaller ElectroneumaticaNICOLAS ESTEBAN PAREDES ORGANISTAAún no hay calificaciones
- Laton 1Documento4 páginasLaton 1Daniel Atoc GalarzaAún no hay calificaciones
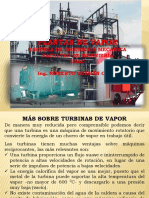
- Turbinas de Vapor Parte 2 - Clase No 3Documento55 páginasTurbinas de Vapor Parte 2 - Clase No 3Rodrigo PerezAún no hay calificaciones
- Eficiencia Diaria Del TransformadorDocumento9 páginasEficiencia Diaria Del TransformadorLimo UrtadoAún no hay calificaciones
- Calculo de Velocidades de Piston y CaudalDocumento47 páginasCalculo de Velocidades de Piston y CaudalWalter Sarango0% (1)
- Red de TuberiasDocumento13 páginasRed de TuberiasGonzalo EnriqueAún no hay calificaciones
- Formato para Diseño de Proyectos ElectricosDocumento46 páginasFormato para Diseño de Proyectos ElectricosGabriel Mendoza FigueroaAún no hay calificaciones
- Ficha Tecnica Domotica Myhome BticinoDocumento504 páginasFicha Tecnica Domotica Myhome Bticinoirene100% (1)
- Taller 1 Maquinas Electricas PDFDocumento4 páginasTaller 1 Maquinas Electricas PDFOscar CruzAún no hay calificaciones
- Guia de Estudios Primer ParcialDocumento4 páginasGuia de Estudios Primer ParcialEnrique MAAún no hay calificaciones
- Conductores LATDocumento18 páginasConductores LATAdore DgoAún no hay calificaciones
- Ensayos de Un Transformador RuralDocumento10 páginasEnsayos de Un Transformador Ruralgacm98Aún no hay calificaciones
- Citrus Z450Documento2 páginasCitrus Z450elvis oriasAún no hay calificaciones
- PRACTICA 1 Equipamiento Del Laboratorio de TelecomunicacionesDocumento18 páginasPRACTICA 1 Equipamiento Del Laboratorio de TelecomunicacionesJhony SiguenzaAún no hay calificaciones
- Seleccion de Bomba EjercicioDocumento1 páginaSeleccion de Bomba EjercicioAmalex AbdiAún no hay calificaciones
- Clase 1 Diodo PotenciaDocumento12 páginasClase 1 Diodo PotenciaCristianSanclementeAún no hay calificaciones
- Capitulo 3 Herramientas de Dibujo TecnicoDocumento53 páginasCapitulo 3 Herramientas de Dibujo TecnicoMauricio Linares0% (1)
- Mecánica de Materiales by Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf David F. Mazurek PDFDocumento5 páginasMecánica de Materiales by Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf David F. Mazurek PDFLolaAún no hay calificaciones
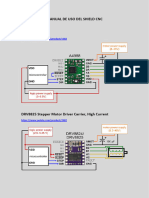
- Manual de Uso Del Shield CNCDocumento3 páginasManual de Uso Del Shield CNCFrank Ronneseth DionicioAún no hay calificaciones
- Ejercicios Semana 20 HV KBM 2018Documento5 páginasEjercicios Semana 20 HV KBM 2018Pedro Luis Cid de la CruzAún no hay calificaciones
- Maquinas Electricas EjerciciosDocumento14 páginasMaquinas Electricas EjerciciosAlex PaulAún no hay calificaciones
- Acoplamiento Magnetico InductivoDocumento6 páginasAcoplamiento Magnetico InductivoTu Lokito Ninito CristhianAún no hay calificaciones
- Dinamica de Maquinas Rotativas PDFDocumento8 páginasDinamica de Maquinas Rotativas PDFJuan BasantesAún no hay calificaciones
- Actividad Grupal N - 02 PDFDocumento7 páginasActividad Grupal N - 02 PDFMiguel Angel Luna VegaAún no hay calificaciones
- Exa Entrada Termodinámica 1 2020Documento1 páginaExa Entrada Termodinámica 1 2020Dilman LimaAún no hay calificaciones
- Chapa de Grano OrientadoDocumento3 páginasChapa de Grano OrientadoJonathan QuirozAún no hay calificaciones
- Capítulo 1 - Física de Semiconductores - Parte 2 Bandas de Energía y Concentración de Portadores en Equilibrio TérmicoDocumento62 páginasCapítulo 1 - Física de Semiconductores - Parte 2 Bandas de Energía y Concentración de Portadores en Equilibrio TérmicoHéctor CortezAún no hay calificaciones
- Soldadura P1Documento2 páginasSoldadura P1DaLcAún no hay calificaciones
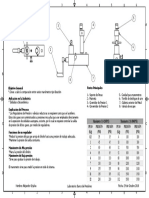
- Temporizador Hidráulico PDFDocumento3 páginasTemporizador Hidráulico PDFIsaac OrocioAún no hay calificaciones
- GUAYAQUIL RadiacionDocumento4 páginasGUAYAQUIL RadiacionNicole SuarezAún no hay calificaciones
- Conductividad Eléctrica en El Aire y VacíoDocumento48 páginasConductividad Eléctrica en El Aire y VacíoKenny Barzola SalgueroAún no hay calificaciones
- RR, RL, RCDocumento5 páginasRR, RL, RCPierina EscasiasAún no hay calificaciones
- Simbologia Sistemas TermicosDocumento8 páginasSimbologia Sistemas TermicosJulio JácomeAún no hay calificaciones
- Preparatorio 6Documento5 páginasPreparatorio 6Roberto Luis TasinchanoAún no hay calificaciones
- Analisis Dinamico de Un Reductor de VelocidadesDocumento4 páginasAnalisis Dinamico de Un Reductor de VelocidadesWilmar Andres RubianoAún no hay calificaciones
- PRIMERAS EvaluacionesDocumento6 páginasPRIMERAS EvaluacionesAndresAún no hay calificaciones
- Banco de PresionesDocumento1 páginaBanco de PresionesEvelinTatianaPinargoteAún no hay calificaciones
- ProblemarioDocumento5 páginasProblemarioMarioAún no hay calificaciones
- Examen de EstadísticaDocumento6 páginasExamen de Estadísticajohn fredyAún no hay calificaciones
- Normas TérmicasDocumento3 páginasNormas Térmicashepl AbsAún no hay calificaciones
- Laboratorio 1Documento28 páginasLaboratorio 1Lenny Rayssa Huayllas CalaniAún no hay calificaciones
- Análisis y Evaluación Experimental de La Potencia Instantánea Trifásica (Reparado)Documento83 páginasAnálisis y Evaluación Experimental de La Potencia Instantánea Trifásica (Reparado)Franz Xavier Gonzalez AranibarAún no hay calificaciones
- Automatas Programables. Manual de Usuario S7 200Documento56 páginasAutomatas Programables. Manual de Usuario S7 200Rafael Román García-sec DAún no hay calificaciones
- 24manilla ZapatillaDocumento2 páginas24manilla ZapatillaRené Luis Perez MagneAún no hay calificaciones
- 17 InstrumentacionDocumento14 páginas17 InstrumentacionJose Antonio P BAún no hay calificaciones
- Circuito RLC en Simulink MatlabDocumento6 páginasCircuito RLC en Simulink MatlabdiegolaglaAún no hay calificaciones
- Conducto EléctricoDocumento4 páginasConducto Eléctricocristiancruz1303Aún no hay calificaciones
- Proyecto Final Mecanismos Cierrapuertas PDFDocumento31 páginasProyecto Final Mecanismos Cierrapuertas PDFMaycool Jhon Haro LopezAún no hay calificaciones
- Informe Final de ProyectoDocumento62 páginasInforme Final de ProyectoFrancisco Javier Esquivel VenturaAún no hay calificaciones
- Proyecto Final RobóticaDocumento100 páginasProyecto Final RobóticaJosmellAlvaAún no hay calificaciones
- Rodamientos 5Documento1 páginaRodamientos 5Julio DíazAún no hay calificaciones
- Rodamientos 1Documento1 páginaRodamientos 1Julio DíazAún no hay calificaciones
- Motor Inducción Trifásico-5Documento1 páginaMotor Inducción Trifásico-5Julio DíazAún no hay calificaciones
- Motor Inducción Trifásico-4Documento1 páginaMotor Inducción Trifásico-4Julio DíazAún no hay calificaciones
- CF y Sistema-2Documento1 páginaCF y Sistema-2Julio DíazAún no hay calificaciones
- Ejercicios SensoresDocumento3 páginasEjercicios SensoresJulio DíazAún no hay calificaciones
- Boletin 3Documento2 páginasBoletin 3Julio DíazAún no hay calificaciones
- Celdas ElectroquímicasDocumento1 páginaCeldas ElectroquímicasJulio DíazAún no hay calificaciones
- Propuesta Comercial Consiente SegurosDocumento10 páginasPropuesta Comercial Consiente SegurosAsistente ComercialAún no hay calificaciones
- Sistema de Ventas de Pasajes NacionalDocumento11 páginasSistema de Ventas de Pasajes NacionalDario Quispe PerezAún no hay calificaciones
- Que Es Un DVR y para Que Se UsaDocumento2 páginasQue Es Un DVR y para Que Se UsaGustavo Morfeo100% (1)
- TP Unsam 2014 2Documento11 páginasTP Unsam 2014 2Mariana Casella0% (1)
- Rubrica Producto Final de Innovation Proyect 2022-1Documento1 páginaRubrica Producto Final de Innovation Proyect 2022-1Nirvana HornaAún no hay calificaciones
- Presaberes - Francisco BadilloDocumento5 páginasPresaberes - Francisco Badillonidia fontecha arizaAún no hay calificaciones
- Requisición de InsumosDocumento5 páginasRequisición de InsumosBrisMorenoAún no hay calificaciones
- Windows 1.0 Y 10Documento18 páginasWindows 1.0 Y 10yuleivis ramirezAún no hay calificaciones
- Modelo de Estudio de Factibilidad de Un Proyecto - GRUPO#2Documento22 páginasModelo de Estudio de Factibilidad de Un Proyecto - GRUPO#2Cynthia CalderonAún no hay calificaciones
- IE C 1837474 1 (Prueba111)Documento5 páginasIE C 1837474 1 (Prueba111)JAIME HERNANDO CORREDOR AGUILARAún no hay calificaciones
- Guardar Un Documento en WordDocumento27 páginasGuardar Un Documento en WordikerAún no hay calificaciones
- Argumento Ensayo Sobre ComputadorasDocumento4 páginasArgumento Ensayo Sobre Computadorastguvgxmpd100% (1)
- Manual Usuario ChromeDocumento5 páginasManual Usuario Chromequo vadisAún no hay calificaciones
- Importancia de Los AsistentesDocumento3 páginasImportancia de Los AsistentesJeanette elizabeth Salazar revolledoAún no hay calificaciones
- Conectar Arduino Al TVDocumento5 páginasConectar Arduino Al TVjoseregistroAún no hay calificaciones
- Tema 1Documento120 páginasTema 1David Parker100% (1)
- Herramientas Digitales para Elaborar Una PresentaciónDocumento3 páginasHerramientas Digitales para Elaborar Una PresentaciónABEL ANTONI RODRIGUEZ QUISPE100% (1)
- 3.4.6 Lab - Configure VLANs and Trunking - ILMDocumento22 páginas3.4.6 Lab - Configure VLANs and Trunking - ILMERNESTO BOAún no hay calificaciones
- R Practica 3Documento14 páginasR Practica 3TechilinRyesAún no hay calificaciones
- Crud Basico Con SymfonyDocumento52 páginasCrud Basico Con SymfonykrloskAún no hay calificaciones
- Curriculum VitaeDocumento2 páginasCurriculum VitaeFrancisco MeryAún no hay calificaciones
- Practica de AccessDocumento4 páginasPractica de AccessAlex Tokiitap TrumperAún no hay calificaciones
- Ejercicio 1Documento2 páginasEjercicio 1Allan HernandezAún no hay calificaciones
- Manual de Operador de PC (Autoguardado)Documento47 páginasManual de Operador de PC (Autoguardado)Valentin Dioses SaldarriagaAún no hay calificaciones
- Ejemplo Dependencias Funcionales y DescomposicionDocumento3 páginasEjemplo Dependencias Funcionales y DescomposicionAlboroto GarcíaAún no hay calificaciones
- Especificaciones de La Ecotank L6171Documento2 páginasEspecificaciones de La Ecotank L6171Miguel PalestinaAún no hay calificaciones
- Manual Lua 5.1Documento94 páginasManual Lua 5.1Mikhail Miguel100% (1)
- Practica8 OSPFDocumento13 páginasPractica8 OSPFRonal CórdovaAún no hay calificaciones
- Tarea Unidad 3Documento6 páginasTarea Unidad 3Jazmín DuarteAún no hay calificaciones
- Introduccion Al Aprendizaje Automatico en PythonDocumento8 páginasIntroduccion Al Aprendizaje Automatico en PythonJuanAún no hay calificaciones