También podría gustarte
- Walton. Fenomenología de La EmpatiaDocumento20 páginasWalton. Fenomenología de La EmpatiaJoaquin ColliardAún no hay calificaciones
- 6 - Instalaciones Básicas - Cuaderno PrácticasDocumento23 páginas6 - Instalaciones Básicas - Cuaderno PrácticaspcpiCiempozuelos100% (6)
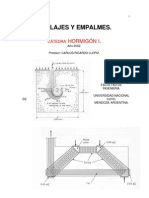
- Anclajes y EmpalmesDocumento26 páginasAnclajes y EmpalmesramilianAún no hay calificaciones
- Ejercicio 1 Unidad 1 Fredy LopezDocumento4 páginasEjercicio 1 Unidad 1 Fredy LopezFernando SierraAún no hay calificaciones
- Tema 3 PDFDocumento23 páginasTema 3 PDFKmilo Andres Vargas VegaAún no hay calificaciones
- Guía de Actividades y Rubrica de Evaluación - Paso 4 - Implementar El Uso de Placas de Desarrollo Hardware PDFDocumento16 páginasGuía de Actividades y Rubrica de Evaluación - Paso 4 - Implementar El Uso de Placas de Desarrollo Hardware PDFJavier SierraAún no hay calificaciones
- Sistemas de AdquisicionDocumento6 páginasSistemas de AdquisicionJavier SierraAún no hay calificaciones
- EJERCICIOS CompletosDocumento8 páginasEJERCICIOS CompletosFernando SierraAún no hay calificaciones
- Ejercicio 1 Unidad 1 - KarenPavaDocumento3 páginasEjercicio 1 Unidad 1 - KarenPavaFernando SierraAún no hay calificaciones
- Sistemas de Adquisición Fase 3Documento13 páginasSistemas de Adquisición Fase 3Carlos RodriguezAún no hay calificaciones
- Ejercicio 1 Unidad 1 - KarenPavaDocumento3 páginasEjercicio 1 Unidad 1 - KarenPavaFernando SierraAún no hay calificaciones
- Ejercicio 1 Unidad 1 Fredy LopezDocumento4 páginasEjercicio 1 Unidad 1 Fredy LopezFernando SierraAún no hay calificaciones
- Ecuaciones Diferenciales Ejercicios 3 y 4Documento5 páginasEcuaciones Diferenciales Ejercicios 3 y 4Fernando SierraAún no hay calificaciones
- Ejercicio 1 Unidad 1 - KarenPavaDocumento3 páginasEjercicio 1 Unidad 1 - KarenPavaFernando SierraAún no hay calificaciones
- Dtaos de Personas Ciclo IVDocumento10 páginasDtaos de Personas Ciclo IVJavier SierraAún no hay calificaciones
- Actividad Individual Unidad1 - Paso 5Documento1 páginaActividad Individual Unidad1 - Paso 5Javier SierraAún no hay calificaciones
- Fase 5 - Transferir Los Conocimientos Aprendidos A La Situación PlanteadaDocumento9 páginasFase 5 - Transferir Los Conocimientos Aprendidos A La Situación PlanteadaFernando SierraAún no hay calificaciones
- Ejercicio 1 Unidad 1 Fredy LopezDocumento4 páginasEjercicio 1 Unidad 1 Fredy LopezFernando SierraAún no hay calificaciones
- Etapa 1 Sistemas Dinamicos 201527 16Documento18 páginasEtapa 1 Sistemas Dinamicos 201527 16Edwin YGAún no hay calificaciones
- Fase 4 - Marlon GonzálezDocumento10 páginasFase 4 - Marlon GonzálezFernando SierraAún no hay calificaciones
- Linea de TiempoDocumento5 páginasLinea de TiempoFernando SierraAún no hay calificaciones
- DudleyMay Fase 1Documento4 páginasDudleyMay Fase 1Fernando SierraAún no hay calificaciones
- DudleyMay-fase 3Documento5 páginasDudleyMay-fase 3Fernando SierraAún no hay calificaciones
- Autobiografia DanielarDocumento4 páginasAutobiografia DanielarFernando SierraAún no hay calificaciones
- Fase II - Luis C Salazar - Aporte Individual Señales y Sistemas 1 (Autoguardado)Documento15 páginasFase II - Luis C Salazar - Aporte Individual Señales y Sistemas 1 (Autoguardado)Fernando SierraAún no hay calificaciones
- Daniel Castellanos - Lab - Regresión y Correlación LinealDocumento1 páginaDaniel Castellanos - Lab - Regresión y Correlación LinealFernando SierraAún no hay calificaciones
- Ejercicio - 1 - Fase 1 - Freddy - GarciaDocumento6 páginasEjercicio - 1 - Fase 1 - Freddy - GarciaFernando SierraAún no hay calificaciones
- ANEXO 2 - Pequeños Problema A Resolver (Tarea 1) PDFDocumento4 páginasANEXO 2 - Pequeños Problema A Resolver (Tarea 1) PDFFernando SierraAún no hay calificaciones
- Actividad Individual Unidad1 - Paso 5Documento1 páginaActividad Individual Unidad1 - Paso 5Javier SierraAún no hay calificaciones
- Clase8 MoleculasyCptosDocumento34 páginasClase8 MoleculasyCptosFernando SierraAún no hay calificaciones
- Ejercicios 8 y 9Documento2 páginasEjercicios 8 y 9Fernando SierraAún no hay calificaciones
- Guía de Actividades y Rúbrica de Evaluación Fase 3 Diseño y Construcción Resolver Problemas y Ejercicios de Ecuaciones Diferenciales de Orden SuperiorDocumento21 páginasGuía de Actividades y Rúbrica de Evaluación Fase 3 Diseño y Construcción Resolver Problemas y Ejercicios de Ecuaciones Diferenciales de Orden SuperiorcarlosAún no hay calificaciones
- Asignaturas Geologica 2016Documento413 páginasAsignaturas Geologica 2016AlejandraAún no hay calificaciones
- AZEOTROPOSDocumento2 páginasAZEOTROPOSjose luis pacheco100% (1)
- CONFORT LUMÍNICO: Factores que influyen en la iluminación natural interiorDocumento23 páginasCONFORT LUMÍNICO: Factores que influyen en la iluminación natural interiorJunior JesusAún no hay calificaciones
- Movimientos de Rotación y TraslaciónDocumento5 páginasMovimientos de Rotación y TraslaciónLucy Tania Hidalgo AlvaradoAún no hay calificaciones
- Motor Electrico ExperimentoDocumento4 páginasMotor Electrico ExperimentoGiancarlo Alvis QuispeAún no hay calificaciones
- Ficha Técnica Master Seal 125Documento4 páginasFicha Técnica Master Seal 125Ángel CamposAún no hay calificaciones
- Lista Equipos MaquinasDocumento5 páginasLista Equipos MaquinasIvan Edwards Gamarra EspinozaAún no hay calificaciones
- ANDESITASDocumento10 páginasANDESITASnbarsayaAún no hay calificaciones
- Materiales compuestos 40Documento24 páginasMateriales compuestos 40miguel ángel lobo rueda100% (1)
- Mediciones IndirectasDocumento8 páginasMediciones IndirectasJessica ApaicoAún no hay calificaciones
- Unprotected Aeropuerto INTRODPROYECTODocumento86 páginasUnprotected Aeropuerto INTRODPROYECTONicolas InfanteAún no hay calificaciones
- 8 - Líquido Ruminal PDFDocumento26 páginas8 - Líquido Ruminal PDFGilli Neumann100% (1)
- Clasificación y funciones de las capas de suelo en terracerías y caminosDocumento34 páginasClasificación y funciones de las capas de suelo en terracerías y caminosMiguel Angel Mejía ZaragozaAún no hay calificaciones
- Determinación de la movilidad en mecanismosDocumento7 páginasDeterminación de la movilidad en mecanismosAlbert HermensAún no hay calificaciones
- PDS HEMPADUR 85531 es-MXDocumento2 páginasPDS HEMPADUR 85531 es-MXDavid Josué Colque100% (1)
- PAON Matematicas II 1Documento9 páginasPAON Matematicas II 1Valeria Escobar HernandezAún no hay calificaciones
- Preinforme Segunda Ley de NewtonDocumento4 páginasPreinforme Segunda Ley de NewtonKarin MinAún no hay calificaciones
- Diseño de Pavimento Rigido Por El Metodo de PcaDocumento18 páginasDiseño de Pavimento Rigido Por El Metodo de PcaSergio Vargas ZapataAún no hay calificaciones
- Guía Ondas II - El Sonido - 2016 - PRODocumento16 páginasGuía Ondas II - El Sonido - 2016 - PROlordviricAún no hay calificaciones
- Informe 4Documento8 páginasInforme 4Nelson BosquezAún no hay calificaciones
- Probabilidad y Estadística: Ejercicios 01Documento2 páginasProbabilidad y Estadística: Ejercicios 01Esteban LeandroAún no hay calificaciones
- Metodosssss, ResumenDocumento114 páginasMetodosssss, ResumenvimabaAún no hay calificaciones
- Fundamentos de ProbabilidadesDocumento61 páginasFundamentos de ProbabilidadesAMYNNXXXXAún no hay calificaciones
- 1.2. Tema 6.2 PDFDocumento40 páginas1.2. Tema 6.2 PDFLuís Alberto Tang YorisAún no hay calificaciones
- Practica Experimental #1Documento6 páginasPractica Experimental #1miltonAún no hay calificaciones
- Monitoreo de SubestaciónDocumento12 páginasMonitoreo de SubestaciónAdrian MorenoAún no hay calificaciones