También podría gustarte
- Resolver Ecuaciones Lineales y No LinealesDocumento26 páginasResolver Ecuaciones Lineales y No Linealeskillroy72Aún no hay calificaciones
- Resolver Ecuaciones Lineales y No Lineales MatlabDocumento26 páginasResolver Ecuaciones Lineales y No Lineales MatlabLee ANAún no hay calificaciones
- Unidad 2 Analisis NumericoDocumento14 páginasUnidad 2 Analisis Numericoemmy_flores_1Aún no hay calificaciones
- Ejercicios de Integrales y Ecuaciones Integrales-DiferencialesDe EverandEjercicios de Integrales y Ecuaciones Integrales-DiferencialesAún no hay calificaciones
- Método de La Secante en MatlabDocumento13 páginasMétodo de La Secante en MatlabBrygida SophiaAún no hay calificaciones
- Interpol Ac I OnDocumento9 páginasInterpol Ac I OnJudimel Muñoz GuayambalAún no hay calificaciones
- Trabajo Metodos Numericos!Documento21 páginasTrabajo Metodos Numericos!mauricioanayaAún no hay calificaciones
- TP Calculo Avanzado COMPLETODocumento46 páginasTP Calculo Avanzado COMPLETOManuelOrsiAún no hay calificaciones
- Método de La SecanteDocumento2 páginasMétodo de La SecantearianaAún no hay calificaciones
- Interpolación numéricaDocumento20 páginasInterpolación numéricaAnonymous MuJwZt7D1iAún no hay calificaciones
- Descripción Del Método de Newton Raphson 2Documento13 páginasDescripción Del Método de Newton Raphson 2Grettel ViquezAún no hay calificaciones
- Sistema de Ecuaciones No LinealesDocumento9 páginasSistema de Ecuaciones No LinealesWanderley Kevin Alccaihuaman Quispe0% (1)
- Resumenes de Clases de Calculo NumericoDocumento10 páginasResumenes de Clases de Calculo NumericoAngie Nohelia Pilligua BasurtoAún no hay calificaciones
- Unidad 3 Metodos NumericosDocumento24 páginasUnidad 3 Metodos NumericosChristian HiramAún no hay calificaciones
- Analisis Numerico Tema 2Documento16 páginasAnalisis Numerico Tema 2Nicolás MéndezAún no hay calificaciones
- Pages From 140849805-Antologia-de-Metodos-NumericosDocumento16 páginasPages From 140849805-Antologia-de-Metodos-NumericosChris Lanza100% (1)
- Tarea Analisis Numerico PDFDocumento11 páginasTarea Analisis Numerico PDFRonald Alarcon RomaniAún no hay calificaciones
- ESPOCHDocumento10 páginasESPOCHEdwin WlaAún no hay calificaciones
- Método de la secante en MATLABDocumento6 páginasMétodo de la secante en MATLABJ Quispe MontañezAún no hay calificaciones
- T2-02 Investigacion Fabio TottiDocumento8 páginasT2-02 Investigacion Fabio TottiTotti CruzAún no hay calificaciones
- Interpolación Numérica PDFDocumento8 páginasInterpolación Numérica PDFBietka SatinAún no hay calificaciones
- Capitulo I - ENL 2Documento26 páginasCapitulo I - ENL 2Ronald Rupay YauriAún no hay calificaciones
- Portafolio MetodosDocumento26 páginasPortafolio MetodosKassandra RosalesAún no hay calificaciones
- Programaciòn en MatlabDocumento20 páginasProgramaciòn en MatlabJose Luis VegaAún no hay calificaciones
- Otros Metodos Numericos..Documento16 páginasOtros Metodos Numericos..Brandon Eliel Cortes GuerreroAún no hay calificaciones
- Unidad 2 Metodos NumericosDocumento32 páginasUnidad 2 Metodos NumericosChristian HiramAún no hay calificaciones
- Trabajo de Analisis NumericoDocumento9 páginasTrabajo de Analisis Numericoandres Infante anicharicoAún no hay calificaciones
- AaaaaDocumento49 páginasAaaaaRoky RbrAún no hay calificaciones
- Unidad 2Documento28 páginasUnidad 2Ivan Alejandro QuirOz78% (9)
- Diablo TrabajoDocumento11 páginasDiablo TrabajoJuan Quispe GonzalesAún no hay calificaciones
- Metodos NumericosDocumento6 páginasMetodos NumericosGerardo MartinezAún no hay calificaciones
- Método de Newton RaphsonDocumento12 páginasMétodo de Newton RaphsonPaulina BulsaraAún no hay calificaciones
- Trabajo Metodos NumericosDocumento25 páginasTrabajo Metodos NumericosCarlos EspinosaAún no hay calificaciones
- Presentacion Unidad 2 - Parte 2Documento39 páginasPresentacion Unidad 2 - Parte 2Julieta AlemanAún no hay calificaciones
- Examen-Fin de CicloDocumento11 páginasExamen-Fin de CicloNewton Marcel Garcia IntriagoAún no hay calificaciones
- Investigacion de Metodo de NewtonDocumento8 páginasInvestigacion de Metodo de NewtonJhoselyn Nikol Jimenez AcevedoAún no hay calificaciones
- Interpolacion y Aproximacion PolinomialDocumento95 páginasInterpolacion y Aproximacion PolinomialKathe VillamarinAún no hay calificaciones
- Métodos iterativos para encontrar raícesDocumento9 páginasMétodos iterativos para encontrar raícesMARCO MAYAún no hay calificaciones
- Métodos numéricos para resolver ecuacionesDocumento27 páginasMétodos numéricos para resolver ecuacionesJonathan CornejoAún no hay calificaciones
- Resumen Metodos NumericosDocumento15 páginasResumen Metodos NumericosRichard Rivaldo Solis MinaAún no hay calificaciones
- Analisis NumericoDocumento11 páginasAnalisis NumericoNathashaLetoAún no hay calificaciones
- Unidad 2Documento34 páginasUnidad 2Maria BeltranAún no hay calificaciones
- Informe N°4Documento8 páginasInforme N°4Gianella Montoya ReinosoAún no hay calificaciones
- Computacion Metodos AbiertosDocumento11 páginasComputacion Metodos AbiertosLixy DaquilemaAún no hay calificaciones
- Derivación NuméricaDocumento11 páginasDerivación Numéricaman101100Aún no hay calificaciones
- Tarea 2 - Vargas Dominguez Roberto AlejandroDocumento5 páginasTarea 2 - Vargas Dominguez Roberto AlejandroRoberto VargasAún no hay calificaciones
- Inv MetodosDocumento5 páginasInv MetodosA GardeniaAún no hay calificaciones
- Métodos Abiertos y Sus Interpretaciones Geométricas Así ComoDocumento30 páginasMétodos Abiertos y Sus Interpretaciones Geométricas Así ComoValeria Osorio Martinez67% (3)
- Raices de Funciones Metodos NumericosDocumento16 páginasRaices de Funciones Metodos NumericosMaximiliano TaubeAún no hay calificaciones
- Metodos NumericosDocumento9 páginasMetodos NumericosFelipe AquinoAún no hay calificaciones
- Regla de Los Signos de DescartesDocumento11 páginasRegla de Los Signos de DescartesAlbert CruzAún no hay calificaciones
- Proyecto F Analisis NumericoDocumento25 páginasProyecto F Analisis NumericoAlexAún no hay calificaciones
- Derivacion NumericaDocumento11 páginasDerivacion NumericaLuis Gustavo Flores RondonAún no hay calificaciones
- El Método de La Regla FalsaDocumento25 páginasEl Método de La Regla FalsaJohnny Rodriguez AguilarAún no hay calificaciones
- Clase7 MN P56Documento12 páginasClase7 MN P56Aly EstefiAún no hay calificaciones
- Matematica 1Documento49 páginasMatematica 1NathaliaMarquezAún no hay calificaciones
- 2.5 Otros MétodosDocumento15 páginas2.5 Otros Métodosadamari ValenciaAún no hay calificaciones
- PLANELECT Cotización #0000022553Documento1 páginaPLANELECT Cotización #0000022553Gilder GonzalezAún no hay calificaciones
- Funciones cognitivas y procesos de desregulación emocionalDocumento2 páginasFunciones cognitivas y procesos de desregulación emocionalGilder GonzalezAún no hay calificaciones
- Tesis Finalizada Victoria RivasDocumento164 páginasTesis Finalizada Victoria RivasGilder GonzalezAún no hay calificaciones
- Relés Zelio - RUMC21BDDocumento7 páginasRelés Zelio - RUMC21BDGilder GonzalezAún no hay calificaciones
- PLANELECT Cotización #0000022553Documento1 páginaPLANELECT Cotización #0000022553Gilder GonzalezAún no hay calificaciones
- EsquemaEléctricoMarina40CaracteresDocumento2 páginasEsquemaEléctricoMarina40CaracteresGilder GonzalezAún no hay calificaciones
- Procedimiento operación planta eléctrica controlador Deep Sea 6120Documento6 páginasProcedimiento operación planta eléctrica controlador Deep Sea 6120Gilder Gonzalez100% (1)
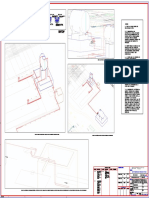
- Plano-De Sistema Electrico ActualDocumento1 páginaPlano-De Sistema Electrico ActualGilder GonzalezAún no hay calificaciones
- MCC SolDocumento3 páginasMCC SolKevin Orlando BonillaAún no hay calificaciones
- Diente HumanoDocumento8 páginasDiente HumanoGilder GonzalezAún no hay calificaciones
- Manual Electronica Del Automovil PDFDocumento126 páginasManual Electronica Del Automovil PDFWilliam Umbarila Pinzon100% (3)
- Circu MagDocumento6 páginasCircu MagJennifer BrizuelaAún no hay calificaciones
- Tesis Finalizada Victoria RivasDocumento164 páginasTesis Finalizada Victoria RivasGilder GonzalezAún no hay calificaciones
- Preliminares Victoria RivasDocumento5 páginasPreliminares Victoria RivasGilder GonzalezAún no hay calificaciones
- Suministro de Energia Electrica PDFDocumento14 páginasSuministro de Energia Electrica PDFGilder GonzalezAún no hay calificaciones
- Barra Coper (Aterramiento)Documento34 páginasBarra Coper (Aterramiento)andyjraAún no hay calificaciones
- Plano-De Sincronismo Del Sitema de RespaldoDocumento1 páginaPlano-De Sincronismo Del Sitema de RespaldoGilder GonzalezAún no hay calificaciones
- Manual Electronica Del Automovil PDFDocumento126 páginasManual Electronica Del Automovil PDFWilliam Umbarila Pinzon100% (3)
- Tesis Final15Documento1 páginaTesis Final15Gilder GonzalezAún no hay calificaciones
- Suministro de Energia Electrica PDFDocumento14 páginasSuministro de Energia Electrica PDFGilder GonzalezAún no hay calificaciones
- Barra Coper (Aterramiento)Documento34 páginasBarra Coper (Aterramiento)andyjraAún no hay calificaciones
- Distribucion en 208y-120v-Ie-Df - 208y-120v PDFDocumento1 páginaDistribucion en 208y-120v-Ie-Df - 208y-120v PDFGilder GonzalezAún no hay calificaciones
- Diseño de Una Planta de Generación de Energía Eléctrica para Una Fábrica de Equipos para El Procesamiento de Alimentos PDFDocumento119 páginasDiseño de Una Planta de Generación de Energía Eléctrica para Una Fábrica de Equipos para El Procesamiento de Alimentos PDFGilder GonzalezAún no hay calificaciones
- DIAGRAMA UNIFILAR-Layout1 PDFDocumento1 páginaDIAGRAMA UNIFILAR-Layout1 PDFGilder GonzalezAún no hay calificaciones
- Anexos PDFDocumento4 páginasAnexos PDFGilder GonzalezAún no hay calificaciones
- Distribución de Gasoil-Maqh0503-Maq-Scb-Dtpl-01-B PDFDocumento1 páginaDistribución de Gasoil-Maqh0503-Maq-Scb-Dtpl-01-B PDFGilder GonzalezAún no hay calificaciones
- DISTRIBUCION EN 480Y-277V-Layout1 PDFDocumento1 páginaDISTRIBUCION EN 480Y-277V-Layout1 PDFGilder GonzalezAún no hay calificaciones
- Dispositivos Proteccion Electrica Puesta Tierra y DisyuntoresDocumento106 páginasDispositivos Proteccion Electrica Puesta Tierra y DisyuntoresGilder GonzalezAún no hay calificaciones
- Origen de La Falla v2Documento8 páginasOrigen de La Falla v2Emiliana Duarte100% (38)
- Deberes Docentes Teg 2011-2 PDFDocumento2 páginasDeberes Docentes Teg 2011-2 PDFGilder GonzalezAún no hay calificaciones
- Certificado y Firma DigitalDocumento3 páginasCertificado y Firma DigitalDenis Ruiz CiezaAún no hay calificaciones
- Procesos Reversibles e IrreversiblesDocumento7 páginasProcesos Reversibles e Irreversiblespapa jhonAún no hay calificaciones
- ISIS1105 202320 Tarea2Documento3 páginasISIS1105 202320 Tarea2Andy OrtizAún no hay calificaciones
- Problema Del Agente Viajero (TSP) : Juan Sebastian Chacón CorreaDocumento35 páginasProblema Del Agente Viajero (TSP) : Juan Sebastian Chacón CorreaJuan Daniel CARDONA SANCHEZAún no hay calificaciones
- Tarea 2 AnalisisDocumento7 páginasTarea 2 AnalisisisaacAún no hay calificaciones
- Trabajo Problemas de Prueba II 2017Documento2 páginasTrabajo Problemas de Prueba II 2017Anonymous EBW5VrBAún no hay calificaciones
- 2007 1 Fi3104Documento6 páginas2007 1 Fi3104Franki InocenteAún no hay calificaciones
- Integracion de RombergDocumento4 páginasIntegracion de RombergAnonymous iH6noeaX7Aún no hay calificaciones
- Regresión lineal peso-estaturaDocumento21 páginasRegresión lineal peso-estaturaAimIx LoVeAún no hay calificaciones
- Examen Final Computación UCDocumento3 páginasExamen Final Computación UCCarlinho SayanAún no hay calificaciones
- Ejemplo Examen Lógica 2Documento4 páginasEjemplo Examen Lógica 2Héctor Salas AriasAún no hay calificaciones
- Universidad Del Tolima: Taller Tutoria 4Documento12 páginasUniversidad Del Tolima: Taller Tutoria 4Cristian GonzálezAún no hay calificaciones
- Control DigitalDocumento8 páginasControl DigitalRubenLopezAguilarAún no hay calificaciones
- Foro de Reforzamiento Estructuras No Lineales y Metodos de Ordenamiento Unidad 3Documento4 páginasForo de Reforzamiento Estructuras No Lineales y Metodos de Ordenamiento Unidad 3Hugo Alberto Ortiz AnayaAún no hay calificaciones
- Estadistica 2Documento3 páginasEstadistica 2Vianneris MorilloAún no hay calificaciones
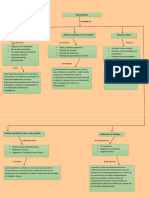
- Mapa ConceptualDocumento1 páginaMapa Conceptualpauleth canAún no hay calificaciones
- Ef MetodosDocumento8 páginasEf Metodosyorman maximoAún no hay calificaciones
- Covid 19 GuayaquilDocumento7 páginasCovid 19 GuayaquilNICOLAS SUASNAVASAún no hay calificaciones
- Pronostico Gerencia de ProduccionDocumento4 páginasPronostico Gerencia de ProduccionValentina GutierrezAún no hay calificaciones
- Aproximacion Numerica y Solución de Ecuaciones PDFDocumento47 páginasAproximacion Numerica y Solución de Ecuaciones PDFMar Martínez MonAún no hay calificaciones
- AlgoritmosDocumento22 páginasAlgoritmosimagen26Aún no hay calificaciones
- Solucion de Problemas Redes e InventariosDocumento61 páginasSolucion de Problemas Redes e InventariosJHOAN STIVEN ESTRELLAAún no hay calificaciones
- Práctica Variables Aleatorias ContinuasDocumento6 páginasPráctica Variables Aleatorias ContinuasSantiago Salazar RuizAún no hay calificaciones
- Practica Algoritmos Jose Lalangui Deber 1Documento10 páginasPractica Algoritmos Jose Lalangui Deber 1Jose LalanguiAún no hay calificaciones
- Trabajo 3 AnalisisDocumento2 páginasTrabajo 3 AnalisisjromansepulvedaAún no hay calificaciones
- Números RectangularesDocumento16 páginasNúmeros RectangularesJuan CarrilloAún no hay calificaciones
- SILABO - Python For Data Analyst PDFDocumento3 páginasSILABO - Python For Data Analyst PDFCRISTHIAN DAVID GONZALES SANDOVALAún no hay calificaciones
- Aplicación de La Derivada PDFDocumento22 páginasAplicación de La Derivada PDFZuriel De Yta ConchaAún no hay calificaciones
- Tarea 1.1Documento6 páginasTarea 1.1KEvinLalanGuiAún no hay calificaciones
- Mapa Conceptual Por Karla Tamayo Bioestadistica - EspañolDocumento2 páginasMapa Conceptual Por Karla Tamayo Bioestadistica - EspañolCorina HernandezAún no hay calificaciones