También podría gustarte
- Ejercicios Tema 6Documento18 páginasEjercicios Tema 6manuelestrella2011Aún no hay calificaciones
- 40 TABLET SAMSUNG A8 x200Documento1 página40 TABLET SAMSUNG A8 x200manuelestrella2011Aún no hay calificaciones
- Unidad 1 - Metrología BásicaDocumento5 páginasUnidad 1 - Metrología Básicamanuelestrella2011Aún no hay calificaciones
- Manual Basico Nodemcu Esp 12e ArduinoDocumento18 páginasManual Basico Nodemcu Esp 12e Arduinomanuelestrella2011Aún no hay calificaciones
- Pensum ElectricidadDocumento2 páginasPensum Electricidadmanuelestrella2011Aún no hay calificaciones
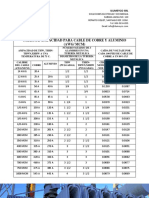
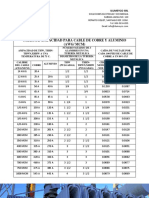
- Tabla de Ampacidad para Cable AWG o MCM PDFDocumento2 páginasTabla de Ampacidad para Cable AWG o MCM PDFmanuelestrella2011Aún no hay calificaciones
- Tabla de Ampacidad para Cable AWG o MCM PDFDocumento2 páginasTabla de Ampacidad para Cable AWG o MCM PDFmanuelestrella2011Aún no hay calificaciones
- SENSORES - TEMPERATURA - V1 Como ElegirDocumento9 páginasSENSORES - TEMPERATURA - V1 Como ElegirdilanAún no hay calificaciones
- Tema 1. Accionamientos Electricos PDFDocumento41 páginasTema 1. Accionamientos Electricos PDFAlejandro Fernández RoldánAún no hay calificaciones
- Normas Ansi FH11 PDFDocumento94 páginasNormas Ansi FH11 PDFFernando Sancán100% (1)
- Practica 3Documento45 páginasPractica 3Daniel Cruz GonzálezAún no hay calificaciones
- Tarea 3 de Ingenieria en Telecomunicaciones FelixDocumento8 páginasTarea 3 de Ingenieria en Telecomunicaciones FelixFELIX ANTONIO MURCIA VELASCOAún no hay calificaciones
- 06 - Momento de Una FuerzaDocumento5 páginas06 - Momento de Una FuerzathaysAún no hay calificaciones
- Catálogo Productos FCI - Fluid Components InternationalDocumento12 páginasCatálogo Productos FCI - Fluid Components InternationalJorge JulianAún no hay calificaciones
- It Fumigacion Con FosfinaDocumento11 páginasIt Fumigacion Con FosfinaLuis Sánchez RoblesAún no hay calificaciones
- U2 - 1 - Conceptos Basicos Acondicionadores de SeñalDocumento5 páginasU2 - 1 - Conceptos Basicos Acondicionadores de SeñalMartin AraujoAún no hay calificaciones
- Diagramas de Flujo y Lego Mindstorms1Documento5 páginasDiagramas de Flujo y Lego Mindstorms1Blachofg FgAún no hay calificaciones
- BW 219 DH-4 PDFDocumento52 páginasBW 219 DH-4 PDFJuan Vargas C100% (3)
- Integrador Arquitectura de Computadoras - Sistema de Riego Automatico - UcpDocumento36 páginasIntegrador Arquitectura de Computadoras - Sistema de Riego Automatico - UcpBenjamin BenitezAún no hay calificaciones
- Nexus7000 ES Rev 1.0Documento27 páginasNexus7000 ES Rev 1.0Jesus RivasAún no hay calificaciones
- .Tipos de Sensores 2007.Documento61 páginas.Tipos de Sensores 2007.Francisco Jorquera100% (1)
- Lcr600 Manual (Español)Documento68 páginasLcr600 Manual (Español)manuel alcala100% (1)
- Informe Calibracion de Sensor de PresionDocumento8 páginasInforme Calibracion de Sensor de PresionStefania PalacioAún no hay calificaciones
- Practica 4 Mecanica de FluidosDocumento10 páginasPractica 4 Mecanica de FluidosAlan SánchezAún no hay calificaciones
- Marco TeóricoDocumento2 páginasMarco TeóricoAnonymous JTrhdEAún no hay calificaciones
- Domotica para TanquesDocumento10 páginasDomotica para TanquesAcontecer NoticiosoAún no hay calificaciones
- Tema 1 Introduccion A Los Sistemas DigitalesDocumento8 páginasTema 1 Introduccion A Los Sistemas DigitalesDr. Krakhos MortiusAún no hay calificaciones
- Manual Pcr-007 100909.final - JMDocumento48 páginasManual Pcr-007 100909.final - JMAn Secreto100% (1)
- Mo TronicDocumento62 páginasMo TronicÁlvaro RevillaAún no hay calificaciones
- Medición de Temperatura y Humedad Con Un Sensor DHT11Documento9 páginasMedición de Temperatura y Humedad Con Un Sensor DHT11Junior TesenAún no hay calificaciones
- Control Automatico Temperatura Con LM35Documento10 páginasControl Automatico Temperatura Con LM35Jorge Eduardo QuinteroAún no hay calificaciones
- Sensores Motor Mercedes CamionDocumento13 páginasSensores Motor Mercedes CamionFran Ruiz92% (49)
- Proyeco de Intrumentacion 22-03-2019Documento9 páginasProyeco de Intrumentacion 22-03-2019YesseLealAún no hay calificaciones
- Sensores ElectromagnéticosDocumento2 páginasSensores ElectromagnéticosMarcelino Velasco GavilanesAún no hay calificaciones
- Sensor Ultrasonico Pepperl+fuchs UB1000-18GM75-U-V15 - SpaDocumento6 páginasSensor Ultrasonico Pepperl+fuchs UB1000-18GM75-U-V15 - SpapintovelozAún no hay calificaciones
- Fase 3 - Grupo 212020 - 53Documento11 páginasFase 3 - Grupo 212020 - 53erikagarciaAún no hay calificaciones