También podría gustarte
- Anexo 4. Formato Seguimiento A La Reincorporación Socio LaboralDocumento5 páginasAnexo 4. Formato Seguimiento A La Reincorporación Socio LaboralIntegra ServiciosAún no hay calificaciones
- Escritura de Compraventa Con Garantia HipotecariaDocumento4 páginasEscritura de Compraventa Con Garantia HipotecariaOneleaMariscal100% (1)
- Banco de Compensacion de Potencia Reactiva Capacitiva y La Calidad de Tension en La Sub Estacion de La Ciudad Del CuscoDocumento217 páginasBanco de Compensacion de Potencia Reactiva Capacitiva y La Calidad de Tension en La Sub Estacion de La Ciudad Del CuscoDidac MessAún no hay calificaciones
- Plan Estratégico para La Mejora de La Gestión EscolarDocumento50 páginasPlan Estratégico para La Mejora de La Gestión Escolarerika100% (1)
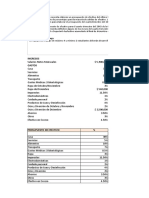
- Presupuesto de EfectivoDocumento6 páginasPresupuesto de EfectivoMarcela PereiraAún no hay calificaciones
- Diseño de Un Inversor MonofasicoDocumento3 páginasDiseño de Un Inversor MonofasicoDidac MessAún no hay calificaciones
- Practica 6 Medidores de CaudalDocumento17 páginasPractica 6 Medidores de CaudalDidac MessAún no hay calificaciones
- Guia Lab 2 Simulado Diseño de BoostDocumento5 páginasGuia Lab 2 Simulado Diseño de BoostDidac MessAún no hay calificaciones
- Caracteristicas Estaticas y Dinamicas SensoresDocumento14 páginasCaracteristicas Estaticas y Dinamicas SensoresDidac MessAún no hay calificaciones
- Laboratorio 5Documento18 páginasLaboratorio 5Didac MessAún no hay calificaciones
- Diseño de Un Rectificador Trifasico ControladoDocumento9 páginasDiseño de Un Rectificador Trifasico ControladoDidac MessAún no hay calificaciones
- PARTE 1 Guia Circuitos Electronicos 1 UNSA 20018FFDocumento17 páginasPARTE 1 Guia Circuitos Electronicos 1 UNSA 20018FFDidac MessAún no hay calificaciones
- Lab 6 Medidas ElectricasDocumento12 páginasLab 6 Medidas ElectricasDidac MessAún no hay calificaciones
- Relacion AguaDocumento4 páginasRelacion AguaMiguel Murga FloresAún no hay calificaciones
- Uso Del Propensity Score Jubc PDFDocumento40 páginasUso Del Propensity Score Jubc PDFXIOMARAramosAún no hay calificaciones
- Lineamientos CVS - Sarampión - Rubeola - Polio - 2022 DefinitivoDocumento42 páginasLineamientos CVS - Sarampión - Rubeola - Polio - 2022 Definitivojorge paredesAún no hay calificaciones
- NIC 36 - Deterioro Del Valor de Los Activos Artículo de RevistaDocumento12 páginasNIC 36 - Deterioro Del Valor de Los Activos Artículo de RevistaFrank RodriguezAún no hay calificaciones
- Semana 8Documento17 páginasSemana 8Jessen Celeste Ormeño SevillaAún no hay calificaciones
- Introducción A La DFIDocumento5 páginasIntroducción A La DFIjorgeluistineocorzoAún no hay calificaciones
- 4° DPCC - Actv.02-Unid.2 Sem 2Documento4 páginas4° DPCC - Actv.02-Unid.2 Sem 2juan diego zapata mauricioAún no hay calificaciones
- Actividad 7Documento5 páginasActividad 7Monica Katerine GARCIA CASTILLOAún no hay calificaciones
- 000-Etiquetas InventarioDocumento2 páginas000-Etiquetas InventarioJuan David Zapata ValenciaAún no hay calificaciones
- Trabajo Integrador Final Grupo 7Documento54 páginasTrabajo Integrador Final Grupo 7Charly Junior Fasanando CamposAún no hay calificaciones
- CCNA 1 V5.0 Prueba Cap 1Documento7 páginasCCNA 1 V5.0 Prueba Cap 1Andy50% (4)
- Codificacion y Difusion Informacion MultimediaDocumento53 páginasCodificacion y Difusion Informacion MultimediaFree MusicAún no hay calificaciones
- Cuestionario-CarreterasDocumento12 páginasCuestionario-CarreterasOscar A Arcia BaezaAún no hay calificaciones
- Acuerdo Plenario 001-2009 - RONDAS CAMPESINASDocumento17 páginasAcuerdo Plenario 001-2009 - RONDAS CAMPESINASJoan Carlos Cossio NeyraAún no hay calificaciones
- Algoritmo BackPropagationDocumento4 páginasAlgoritmo BackPropagationisraaelmelchorAún no hay calificaciones
- Tutorial 18 Modulo Sensor Receptor InfrarrojoDocumento7 páginasTutorial 18 Modulo Sensor Receptor Infrarrojojuan carlos torresAún no hay calificaciones
- Sentencia T 055 de 2020Documento3 páginasSentencia T 055 de 2020dina murilloAún no hay calificaciones
- Proceso Contravencional y Coactivo FCMDocumento14 páginasProceso Contravencional y Coactivo FCMANGELA MORAAún no hay calificaciones
- Ética en El Manejo de La Información 1Documento4 páginasÉtica en El Manejo de La Información 1Maria camila escalante perezAún no hay calificaciones
- Una App Que PagaDocumento2 páginasUna App Que PagaSmart DomAún no hay calificaciones
- Documentación Modulos Vs ComponentesDocumento19 páginasDocumentación Modulos Vs ComponentesChristianQuirozPlefkeAún no hay calificaciones
- Diagnóstico de Una Instalación EléctricaDocumento4 páginasDiagnóstico de Una Instalación EléctricaweroRivera89Aún no hay calificaciones
- Cuestionario de Factores Psicosociales de OcupabilidadDocumento4 páginasCuestionario de Factores Psicosociales de OcupabilidadOscarAún no hay calificaciones
- Vocabulario TecnicoDocumento3 páginasVocabulario TecnicoIancarlos RamirezAún no hay calificaciones
- Conceptos básic-WPS OfficeDocumento4 páginasConceptos básic-WPS OfficeFrancisco PaniaguaAún no hay calificaciones