También podría gustarte
- Funciones CuadráticasDocumento20 páginasFunciones CuadráticasMargarita Illescas Christian VazquezAún no hay calificaciones
- Funciones CuadráticasDocumento35 páginasFunciones CuadráticasFabiana Nieva100% (3)
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones
- Funciones CuadráticasDocumento23 páginasFunciones CuadráticasSln AngelAún no hay calificaciones
- Formas Bilineales y CuadráticasDocumento11 páginasFormas Bilineales y Cuadráticascl4d10Aún no hay calificaciones
- Taller Vector EsDocumento3 páginasTaller Vector EsSebastian Sandoval ChavarroAún no hay calificaciones
- TBL Articulos - Pdf2.88bc4d5977fc1015.363330342e706466Documento16 páginasTBL Articulos - Pdf2.88bc4d5977fc1015.363330342e706466Maria HernándezAún no hay calificaciones
- Algebra Lineal - Taller 4, Espacios Vectoriales PDFDocumento4 páginasAlgebra Lineal - Taller 4, Espacios Vectoriales PDFOscarOchoaAún no hay calificaciones
- Problemas EspaciosVectorialesDocumento5 páginasProblemas EspaciosVectorialespatyAún no hay calificaciones
- Formas Cuadráticas, Clasif y Restricciones, 5 PágsDocumento5 páginasFormas Cuadráticas, Clasif y Restricciones, 5 PágsJOSÉ LÓPEZAún no hay calificaciones
- Calculo 3Documento2 páginasCalculo 3raziel7787Aún no hay calificaciones
- Funciones CuadráticasDocumento23 páginasFunciones CuadráticasprofesorGuaguaAún no hay calificaciones
- ComplejosDocumento12 páginasComplejosAMYNNXXXXAún no hay calificaciones
- Representacion Matricial y Valores PropiosDocumento4 páginasRepresentacion Matricial y Valores PropiosGabriela María Zapata PintoAún no hay calificaciones
- Ecuaciones CuadráticasDocumento37 páginasEcuaciones CuadráticasFrancisco Daza100% (1)
- PEB Tarea Matemática - Unidad 04 2023 - IDocumento3 páginasPEB Tarea Matemática - Unidad 04 2023 - ICamila ZárateAún no hay calificaciones
- Taller 4Documento4 páginasTaller 4Alexander Castañeda0% (1)
- Ejercicios de Vectores en El Espacio I PDFDocumento14 páginasEjercicios de Vectores en El Espacio I PDFYakumo ArelisAún no hay calificaciones
- Problemas Resueltos y Propuestos de C Lculo Diferencial de Varias VariablesDocumento102 páginasProblemas Resueltos y Propuestos de C Lculo Diferencial de Varias VariablesPedro JoseAún no hay calificaciones
- GRAFICOS DE FUNCIONES FannyDocumento5 páginasGRAFICOS DE FUNCIONES FannyFanny100% (1)
- BCMV U1 A2 JochDocumento7 páginasBCMV U1 A2 JochJosue CruzAún no hay calificaciones
- Curvas de NivelDocumento41 páginasCurvas de Nivelteklador123456Aún no hay calificaciones
- Calculo Vectorial Guia 1 1 PDFDocumento42 páginasCalculo Vectorial Guia 1 1 PDFStephanie ÁngelAún no hay calificaciones
- Espacios VectorialesDocumento5 páginasEspacios VectorialesLaudino Vega ValenciaAún no hay calificaciones
- Deber de Espacios VectorialesDocumento3 páginasDeber de Espacios VectorialesJorge SánchezAún no hay calificaciones
- Espacios VectorialesDocumento10 páginasEspacios VectorialesMagdaPinzónAún no hay calificaciones
- GuiasGeometriaII 2021hiperbolaDocumento5 páginasGuiasGeometriaII 2021hiperbolaJosué RubioAún no hay calificaciones
- Pad MIM15Documento5 páginasPad MIM15Edgar Muñoz ViveroAún no hay calificaciones
- ParcialI-Lectura 3 - VectoresDocumento17 páginasParcialI-Lectura 3 - VectoresMarielaMascelloniAún no hay calificaciones
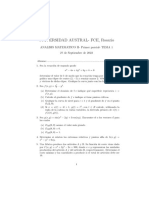
- Parcial - AMII 2709tema1Documento1 páginaParcial - AMII 2709tema1Daniel Osvaldo ScioliAún no hay calificaciones
- Guía 1 - Cálculo IIIDocumento5 páginasGuía 1 - Cálculo IIIZhikito02 FvfAún no hay calificaciones
- Quiz G1 12 08Documento4 páginasQuiz G1 12 08Manuel Zuñiiga0% (1)
- Guia-Taller 1 RectasDocumento7 páginasGuia-Taller 1 Rectascarlos salomAún no hay calificaciones
- Hoja 5 ProblemasDocumento2 páginasHoja 5 ProblemasMaría Alonso SantillanaAún no hay calificaciones
- Vectores, Rectas y Planos en El EspacioDocumento1 páginaVectores, Rectas y Planos en El EspacioAngélica NiñoAún no hay calificaciones
- 2018 GAPParcial 1 SolucionDocumento7 páginas2018 GAPParcial 1 SolucionCarmen GarridoAún no hay calificaciones
- Bases PC4Documento10 páginasBases PC4Eldurvatn EldurvatnAún no hay calificaciones
- Capitulo 10 EjerciciosDocumento6 páginasCapitulo 10 EjerciciosFranklin AngamarcaAún no hay calificaciones
- Hoja de Problemas Espacios Vectoriales. Tema 4Documento3 páginasHoja de Problemas Espacios Vectoriales. Tema 4danielbroceno3sanfranciscoAún no hay calificaciones
- Geometria Analitica 1Documento8 páginasGeometria Analitica 1MoisesDonoso100% (1)
- Espacios Vectoriales PSR PDFDocumento2 páginasEspacios Vectoriales PSR PDFesehackerAún no hay calificaciones
- Rel 1Documento3 páginasRel 1aitorr_1Aún no hay calificaciones
- Teoria 6 - VectoresDocumento17 páginasTeoria 6 - VectoresCristian RamírezAún no hay calificaciones
- 1Q Pro Tema1 2021Documento3 páginas1Q Pro Tema1 2021PacoSanchezBorregoAún no hay calificaciones
- Algebra Lineal, Formas Bilineales, Cuadráticas y Determinantes - CuadernoDocumento60 páginasAlgebra Lineal, Formas Bilineales, Cuadráticas y Determinantes - CuadernoOnofre Hernandez AltamiranoAún no hay calificaciones
- 00cap 9 Formas Bilineales y CuadraticasDocumento36 páginas00cap 9 Formas Bilineales y Cuadraticaseli2013Aún no hay calificaciones
- La Gran GuiaDocumento77 páginasLa Gran GuiaKeith Pittman100% (1)
- Modelos de ExamenDocumento3 páginasModelos de ExamenMason CherryAún no hay calificaciones
- Rectas 10ADocumento7 páginasRectas 10AOscar NiñoAún no hay calificaciones
- Álgebra LinealDocumento181 páginasÁlgebra LinealIvan LopezAún no hay calificaciones
- Vectores Ejercicios Ecuador PDFDocumento6 páginasVectores Ejercicios Ecuador PDFLuis CorteAún no hay calificaciones
- Espacios Vectoriales 2010 PDFDocumento10 páginasEspacios Vectoriales 2010 PDFMariaAún no hay calificaciones
- Taller Varias Variables UNALDocumento30 páginasTaller Varias Variables UNALJohanaCamilaAmórteguiAún no hay calificaciones
- 05 Apuntes - Principios de AjustamientoDocumento41 páginas05 Apuntes - Principios de AjustamientoLaura Gisela Flores0% (1)
- Soluciones AMII FIUBA Guia I - 1c 2019 - Geometria Del Plano y Del Espacio - SilvinaDocumento14 páginasSoluciones AMII FIUBA Guia I - 1c 2019 - Geometria Del Plano y Del Espacio - Silvinajuaz38Aún no hay calificaciones
- Discusión y Gráfica de EcuacionesDocumento8 páginasDiscusión y Gráfica de EcuacionesfreshaAún no hay calificaciones
- Reporte 1Documento4 páginasReporte 1Jacobo GuzmanAún no hay calificaciones
- Manual Unico de Operacion-2011fDocumento176 páginasManual Unico de Operacion-2011fbenitojrlAún no hay calificaciones
- PLACE InfluenzaDocumento24 páginasPLACE InfluenzaGuadalupe Villegas75% (4)
- Material Ferretero2Documento3 páginasMaterial Ferretero2selvamejiaAún no hay calificaciones
- Panel Muros de Contencion Grupo 10Documento1 páginaPanel Muros de Contencion Grupo 10morgana50Aún no hay calificaciones
- TERMINADO Antecedentes de La Globalización y Los Negocios InternacionalesDocumento7 páginasTERMINADO Antecedentes de La Globalización y Los Negocios InternacionalesVale PortoAún no hay calificaciones
- Monografia Del Silencio Administrativo.Documento52 páginasMonografia Del Silencio Administrativo.Milagros Joseph Vargas83% (6)
- Semana 4 - RMDocumento10 páginasSemana 4 - RMMario ParedesAún no hay calificaciones
- Biotipología CriminalDocumento5 páginasBiotipología CriminalMaryori EvelynAún no hay calificaciones
- Electricidad - 4Documento61 páginasElectricidad - 4Felix Rodriguez Olvera100% (1)
- Teoria Vincular Tesis Sonia Kleiman PDFDocumento16 páginasTeoria Vincular Tesis Sonia Kleiman PDFMaria TricaricoAún no hay calificaciones
- Clase Sobre La Mentira para KantDocumento2 páginasClase Sobre La Mentira para KantEzequiel BraunsteinAún no hay calificaciones
- Tarea 28Documento6 páginasTarea 28Andrés SPAún no hay calificaciones
- Ensayo Ciencias 344 N°3Documento60 páginasEnsayo Ciencias 344 N°3Neri AylinAún no hay calificaciones
- Ejercicio Gestión Del Mantenimiento.Documento2 páginasEjercicio Gestión Del Mantenimiento.Kareen ArayaAún no hay calificaciones
- Inventario Local Comercial Casa BlancaDocumento3 páginasInventario Local Comercial Casa BlancaCarolae García67% (6)
- Experiencia de Aprendiza 3° - 4° GradoDocumento4 páginasExperiencia de Aprendiza 3° - 4° GradoELMER TIGRE HUAMAN100% (1)
- Implementacion de Un Modelo de Costos ABC en Empresa VitivinicolaDocumento12 páginasImplementacion de Un Modelo de Costos ABC en Empresa VitivinicolaEd Alejandro NegritoAún no hay calificaciones
- Practica de 20 Puntos Johanny Altagracia PérezDocumento6 páginasPractica de 20 Puntos Johanny Altagracia PérezGabriel AvilaAún no hay calificaciones
- 4-C Matutino SD2 No 21Documento6 páginas4-C Matutino SD2 No 21Lorena Jiménez VenturaAún no hay calificaciones
- Rendimientos CFEDocumento1 páginaRendimientos CFEantonioAún no hay calificaciones
- PORTAFOLIODocumento8 páginasPORTAFOLIOESTEBAN GONZALEZ GELVEZAún no hay calificaciones
- Localizacio y PorcentajesDocumento15 páginasLocalizacio y PorcentajesClaudia FranciscaAún no hay calificaciones
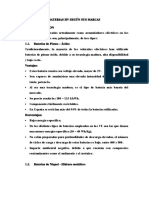
- Consulta de Baterias Segun Sus MarcasDocumento17 páginasConsulta de Baterias Segun Sus MarcasStephenakd13100% (1)
- EnsayoDocumento1 páginaEnsayoDamarAún no hay calificaciones
- Op-Pets-Chm-13 Cambio de Forros de Main Shaft de Chancadora Metso LT330DDocumento23 páginasOp-Pets-Chm-13 Cambio de Forros de Main Shaft de Chancadora Metso LT330DIris Huamani MartinezAún no hay calificaciones
- Grúa PorticaDocumento11 páginasGrúa PorticaAURISTELA ALCIVAR GILERAún no hay calificaciones
- Silabo Sistema de Administracion de Bienes y Servicios 2016Documento4 páginasSilabo Sistema de Administracion de Bienes y Servicios 2016Jhon Chino100% (1)
- MENISCOPLASTIADocumento8 páginasMENISCOPLASTIAOrlando GascaAún no hay calificaciones
- Epu - Documento Base - Semana 7Documento20 páginasEpu - Documento Base - Semana 7Camila GuamánAún no hay calificaciones