También podría gustarte
- Calculo TKPHDocumento24 páginasCalculo TKPHAdrian Orozco100% (1)
- Especificaciones Tecnicas 1308668449828Documento21 páginasEspecificaciones Tecnicas 1308668449828Roger Labra LlanoAún no hay calificaciones
- Presentación ERP MURANODocumento55 páginasPresentación ERP MURANOFreddy BeltranAún no hay calificaciones
- RCop PDFDocumento140 páginasRCop PDFDaniel Monsalve SandovalAún no hay calificaciones
- FASE 2 Memorias Tecnicas Disenos Viales Int. Juan Tanca MDocumento18 páginasFASE 2 Memorias Tecnicas Disenos Viales Int. Juan Tanca MJefferson Guanoluisa SantosAún no hay calificaciones
- Paso A Paso Del Metodo de Harly CrossDocumento9 páginasPaso A Paso Del Metodo de Harly Crossangel lozadaAún no hay calificaciones
- Calculo Integral Lmejia 2017Documento108 páginasCalculo Integral Lmejia 2017Pablo Fernández Silva100% (5)
- IMPO - Acuerdos de Seguridad - Asociados de Negocio - EspañolDocumento26 páginasIMPO - Acuerdos de Seguridad - Asociados de Negocio - EspañolSergio Oswaldo Paniagua Montoya100% (1)
- Método de Los Elementos FinitosDocumento22 páginasMétodo de Los Elementos FinitosLeonel Cañari GonzalesAún no hay calificaciones
- Como Configurar Los Jumpers en Un Disco Duro IdeDocumento6 páginasComo Configurar Los Jumpers en Un Disco Duro IdeRubén BellónAún no hay calificaciones
- 05 y 06.PREDIMENSIONAMIENTO de Elementos EstructuralesDocumento16 páginas05 y 06.PREDIMENSIONAMIENTO de Elementos EstructuralesBetoFlorAún no hay calificaciones
- Tren Rodaje Systemone CatDocumento7 páginasTren Rodaje Systemone CatRene CardonaAún no hay calificaciones
- Reglamento Consultores 1 MOPDocumento43 páginasReglamento Consultores 1 MOPcarloscatalanAún no hay calificaciones
- Caso Práctico de Propiedad Planta y Equipo-CedulasDocumento14 páginasCaso Práctico de Propiedad Planta y Equipo-CedulasMaryori Roas100% (1)
- 17-Circulo de VienaDocumento45 páginas17-Circulo de VienaSergio FabianAún no hay calificaciones
- Ae2 Aps3-D Método Aps3dDocumento10 páginasAe2 Aps3-D Método Aps3dJuan NieveAún no hay calificaciones
- Reglamento para Contratos de Obras Públicas Decreto MOP Nº75Documento120 páginasReglamento para Contratos de Obras Públicas Decreto MOP Nº75Rodrigo AguirreAún no hay calificaciones
- Levantamiento IeDocumento10 páginasLevantamiento IeJorgeLunaAún no hay calificaciones
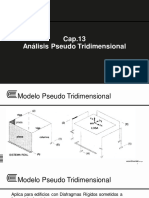
- .Analisis P3DDocumento41 páginas.Analisis P3DoscarAún no hay calificaciones
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones
- Análisis Pseudo-Tridimensional - Parte 12 PDFDocumento21 páginasAnálisis Pseudo-Tridimensional - Parte 12 PDFRJ GVillacortaAún no hay calificaciones
- Espacios VectorialesDocumento51 páginasEspacios VectorialesAnonymous nfGqSiDw1DAún no hay calificaciones
- PolinomiosDocumento34 páginasPolinomiosJulián ScortechiniAún no hay calificaciones
- 31 - Manual de Referencia de Tarifas en IngenieríaDocumento48 páginas31 - Manual de Referencia de Tarifas en IngenieríaJuan Camilo Vasco LeivaAún no hay calificaciones
- Sistemas Dinámicos Varios Grados de LibertadDocumento50 páginasSistemas Dinámicos Varios Grados de LibertadTedder Aquino YupanquiAún no hay calificaciones
- 2productos ASFALCHILEDocumento10 páginas2productos ASFALCHILEWy ApAún no hay calificaciones
- Aliva-Brazo Robot SikaDocumento209 páginasAliva-Brazo Robot Sikamiler81Aún no hay calificaciones
- Vibracion Libre SubamortiguadaDocumento25 páginasVibracion Libre SubamortiguadaGuillermo Pérez100% (2)
- Método de Superposición ModalDocumento37 páginasMétodo de Superposición ModalSANTIAGO TORRESAún no hay calificaciones
- Problemas Resueltos Sobre MASDocumento26 páginasProblemas Resueltos Sobre MASDaisy MartinezAún no hay calificaciones
- Boletin 1Documento5 páginasBoletin 1Rodrigo Muñoz TocaleAún no hay calificaciones
- Dos Métodos para Distribuir Las Fuerzas Horizontales A Los PorticosDocumento12 páginasDos Métodos para Distribuir Las Fuerzas Horizontales A Los PorticosraulcarooAún no hay calificaciones
- Conexiones Apernadas y Soldadas - María FratelliDocumento100 páginasConexiones Apernadas y Soldadas - María Fratellihectoramado_8100% (2)
- Guía Método de Rigidez Directa REV.2Documento28 páginasGuía Método de Rigidez Directa REV.2Andres LopezAún no hay calificaciones
- TI Civil AnteproyectoDocumento24 páginasTI Civil AnteproyectoRuben Dario Torres UrbanoAún no hay calificaciones
- Revista Geotecnia Smig Numero 222Documento52 páginasRevista Geotecnia Smig Numero 222Trebor H100% (1)
- Guía Nómada y Sedentario Segundo Básico 17 Al 28 de Agosto.Documento5 páginasGuía Nómada y Sedentario Segundo Básico 17 Al 28 de Agosto.rosanalourdeAún no hay calificaciones
- 4 GeotecniaDocumento5 páginas4 GeotecniaManuel Alejandro Celeita GonzalezAún no hay calificaciones
- 12 Dinamica de Estructuras de AutosDocumento4 páginas12 Dinamica de Estructuras de AutosJorgeLeon1234Aún no hay calificaciones
- Circulo de MohrDocumento17 páginasCirculo de MohrJoseph FerrariAún no hay calificaciones
- MODULO - CIRCUNFERENCIA y ELIPSE - ING CIVILDocumento16 páginasMODULO - CIRCUNFERENCIA y ELIPSE - ING CIVILCarlos RodriguezAún no hay calificaciones
- Apio PDFDocumento11 páginasApio PDFJorgeIvanLoaizaBonillaAún no hay calificaciones
- Slarry SealDocumento7 páginasSlarry SealElmerChoqueUruriAún no hay calificaciones
- PROPEDÉUTICA 2021 CálculoDocumento38 páginasPROPEDÉUTICA 2021 CálculoAlexander Jose Pelaez MartinezAún no hay calificaciones
- ZEGARRA Luis Algebra PDFDocumento407 páginasZEGARRA Luis Algebra PDFyeison adrian vargasAún no hay calificaciones
- Base Datos 2021Documento24 páginasBase Datos 2021John ArredondoAún no hay calificaciones
- Análisis PseudotridimensionalDocumento30 páginasAnálisis PseudotridimensionalMichael Barbaran LealAún no hay calificaciones
- Compactación HormigonDocumento54 páginasCompactación HormigonJose Antonio Arenas VicencioAún no hay calificaciones
- Ejercicios Estequiometria ResueltosDocumento9 páginasEjercicios Estequiometria ResueltosAlbert Eisntein BeispielAún no hay calificaciones
- Unidad 2 Actividad 3 Pricipio Del Buen Orden (Algebra)Documento5 páginasUnidad 2 Actividad 3 Pricipio Del Buen Orden (Algebra)Elda JosefinaAún no hay calificaciones
- S-5 - Metodo Pseudo TridimensionalDocumento13 páginasS-5 - Metodo Pseudo TridimensionalDamiano Ccorisoncco AlfredoAún no hay calificaciones
- Metodos Numericos ICC-1027Documento47 páginasMetodos Numericos ICC-1027Mti Ulises Girón Jiménez50% (2)
- Definición Cinemática - MruvDocumento3 páginasDefinición Cinemática - MruvDavid Arévalo SalazarAún no hay calificaciones
- Funciones TrigonométricasDocumento8 páginasFunciones Trigonométricasapi-3732167100% (4)
- Carta Urbana NomenclaturaDocumento1 páginaCarta Urbana NomenclaturaLizR.Oropeza100% (1)
- Trab. Pract. 103 1 UGRM.Documento2 páginasTrab. Pract. 103 1 UGRM.Luis Alberto Roman AtilaAún no hay calificaciones
- TrigonometríaDocumento23 páginasTrigonometríaadora_las_mates100% (7)
- Sistemas Amortiguados de Dos Grados de LibertadDocumento16 páginasSistemas Amortiguados de Dos Grados de LibertadXavier Freire ZamoraAún no hay calificaciones
- Trabajo de RecuperaciónDocumento11 páginasTrabajo de RecuperaciónGlen GranadosAún no hay calificaciones
- Informe Practica 2Documento9 páginasInforme Practica 2Juan Jose Eraso DelgadoAún no hay calificaciones
- DespejeDocumento9 páginasDespejeana arriecheAún no hay calificaciones
- Oscilaciones ApuntesDocumento20 páginasOscilaciones ApuntesKoke CallejasAún no hay calificaciones
- EcuacionesDocumento21 páginasEcuacionesHummer HDAún no hay calificaciones
- UNIDAD 3 Aplic de ECU. DIF. 1er Orden Formato Del LibroDocumento43 páginasUNIDAD 3 Aplic de ECU. DIF. 1er Orden Formato Del LibroJhonS.Sanchez100% (1)
- Aprovechamiento de Llantas Usadas para La Fabricación de Pisos Decorativos PDFDocumento79 páginasAprovechamiento de Llantas Usadas para La Fabricación de Pisos Decorativos PDFManuel Oyarvide Bruno100% (1)
- 1.-Definicion Base Datos IDocumento54 páginas1.-Definicion Base Datos IrikardoroaAún no hay calificaciones
- Crudo MedianoDocumento29 páginasCrudo MedianoAndrés David RojasAún no hay calificaciones
- Espacificaciones EkonopanelDocumento2 páginasEspacificaciones EkonopanelVictor Alejandro Calderón GonzálezAún no hay calificaciones
- Hoja Ruta Mecanica ModifDocumento23 páginasHoja Ruta Mecanica ModifGonzales RoussAún no hay calificaciones
- 02 Cortes - ElevacionesDocumento1 página02 Cortes - ElevacionesAlvarado Gonzales RogerAún no hay calificaciones
- El Por Qué Ergonómico de La Disposición de Los Pedales en Los AutosDocumento5 páginasEl Por Qué Ergonómico de La Disposición de Los Pedales en Los AutosBernardo Williams100% (1)
- Comparacion de NormasDocumento3 páginasComparacion de NormasDaniel Villagomez SilvaAún no hay calificaciones
- Costos Estándar: Caterina Lay MontoyaDocumento13 páginasCostos Estándar: Caterina Lay MontoyaRosalindaSolanoMolinaAún no hay calificaciones
- NP#7 Apu Sumidero - 5-10-2020Documento5 páginasNP#7 Apu Sumidero - 5-10-2020camilo andres perez ascanioAún no hay calificaciones
- PIA.2S12 JanathanOsorioDocumento5 páginasPIA.2S12 JanathanOsorioJanathan Osorio EscamillaAún no hay calificaciones
- Plan de Masificacion Del Uso Del Gas Natural en La Macroregion SurDocumento19 páginasPlan de Masificacion Del Uso Del Gas Natural en La Macroregion SurEdwin MoralitosAún no hay calificaciones
- Actividades Grupales y de Investigación 15Documento6 páginasActividades Grupales y de Investigación 15SamiRosalesAún no hay calificaciones
- Ficosa - Dossier Prensa 2011Documento13 páginasFicosa - Dossier Prensa 2011Ramon FinnAún no hay calificaciones
- Investigacion Accidente VolqueteDocumento7 páginasInvestigacion Accidente VolqueteIsidro MolinaAún no hay calificaciones
- Catálogo Catalogue: Pistones Aros Ejes Camisas Pistons Rings Pins LinersDocumento335 páginasCatálogo Catalogue: Pistones Aros Ejes Camisas Pistons Rings Pins LinersROBINSON GUERREROAún no hay calificaciones
- Trabajo Completo 3EER PARCIAL1Documento126 páginasTrabajo Completo 3EER PARCIAL1Lucero HuamánAún no hay calificaciones
- Avances Tecnologicos en Los Ultimos 20 AñosDocumento5 páginasAvances Tecnologicos en Los Ultimos 20 AñosKflatvia Ras100% (2)
- Turbinas Turgo FinalDocumento13 páginasTurbinas Turgo FinalPabloVelasquezDamianAún no hay calificaciones
- Informe de Levantamiento TopograficoDocumento7 páginasInforme de Levantamiento TopograficoCarlos Rosales CollasAún no hay calificaciones
- TAREA3Documento2 páginasTAREA3omar3122300120% (1)
- Ensayo Bloques de MotoresDocumento3 páginasEnsayo Bloques de MotoresLauraHernandezAún no hay calificaciones
- Analisis Costo Beneficio Responder PreguntasDocumento3 páginasAnalisis Costo Beneficio Responder PreguntasTATIANAAún no hay calificaciones