También podría gustarte
- Data Communications and Networking Forouzan 4ed Solucionario - En.esDocumento109 páginasData Communications and Networking Forouzan 4ed Solucionario - En.esLuis Angel Nina SánchezAún no hay calificaciones
- R37-160 Informacion Sep-18Documento76 páginasR37-160 Informacion Sep-18Luis Angel Nina SánchezAún no hay calificaciones
- GUIA 6 - Software de RedDocumento9 páginasGUIA 6 - Software de RedLuis Angel Nina SánchezAún no hay calificaciones
- Eh Series Operador EspañolDocumento48 páginasEh Series Operador EspañolLuis Angel Nina SánchezAún no hay calificaciones
- ProtocolosDocumento5 páginasProtocolosLuis Angel Nina SánchezAún no hay calificaciones
- IMT31A Manual - Compressed - Organized-1-100.en - EsDocumento100 páginasIMT31A Manual - Compressed - Organized-1-100.en - EsLuis Angel Nina SánchezAún no hay calificaciones
- Fisica CuanticaDocumento47 páginasFisica CuanticaMartin100% (6)
- F2T1-Multiplexacion y EnsanchadoDocumento79 páginasF2T1-Multiplexacion y EnsanchadoGiancarlo VillanuevaAún no hay calificaciones
- Sensores ÓpticosDocumento2 páginasSensores ÓpticosByron Montufar67% (9)
- Examen HARTDocumento2 páginasExamen HARTLuis Angel Nina SánchezAún no hay calificaciones
- Sensores ResistivosDocumento86 páginasSensores ResistivosLuis Angel Nina SánchezAún no hay calificaciones
- Resumen Realidad Nacional - Luis NinaDocumento4 páginasResumen Realidad Nacional - Luis NinaLuis Angel Nina SánchezAún no hay calificaciones
- Sensores ResistivosDocumento86 páginasSensores ResistivosLuis Angel Nina SánchezAún no hay calificaciones
- Tema10 BuclesTensionCorrienteDocumento34 páginasTema10 BuclesTensionCorrienteLuis Angel Nina SánchezAún no hay calificaciones
- Guia6 - LinealizacionDocumento7 páginasGuia6 - LinealizacionLuis Angel Nina SánchezAún no hay calificaciones
- Introduccion A Los Sistemas Transmisores de TVDocumento34 páginasIntroduccion A Los Sistemas Transmisores de TVLuis Angel Nina SánchezAún no hay calificaciones
- Redes NeuronalesDocumento52 páginasRedes NeuronalesJinno Orellana100% (1)
- LINEALIZACIONDocumento2 páginasLINEALIZACIONJesus Garcia GarciaAún no hay calificaciones
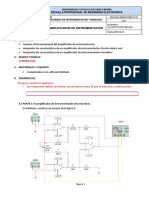
- Guia7 - El Amplificador de InstrumentacionDocumento11 páginasGuia7 - El Amplificador de InstrumentacionLuis Angel Nina SánchezAún no hay calificaciones
- Capacitores de Acoplo y DesacoploDocumento4 páginasCapacitores de Acoplo y DesacoploLuis Angel Nina SánchezAún no hay calificaciones
- Newton RaphsonDocumento5 páginasNewton RaphsonLuis Angel Nina SánchezAún no hay calificaciones
- Cap2 Amplificacion EjemplosDocumento12 páginasCap2 Amplificacion EjemplosLuis Angel Nina SánchezAún no hay calificaciones
- AfínDocumento5 páginasAfínErika Gisel Velazquez RuizAún no hay calificaciones
- La Difusion de La InformacionDocumento20 páginasLa Difusion de La InformacionLuis Angel Nina SánchezAún no hay calificaciones
- Modelos de Propagacion para La Planificacion de Redes LTE-A (Luis Nina)Documento30 páginasModelos de Propagacion para La Planificacion de Redes LTE-A (Luis Nina)Luis Angel Nina Sánchez100% (1)
- Etapa Física de Los Sistemas LTE-A (Luis Nina)Documento11 páginasEtapa Física de Los Sistemas LTE-A (Luis Nina)Luis Angel Nina SánchezAún no hay calificaciones
- Tarea 4 Sistemas Digitales IIIDocumento10 páginasTarea 4 Sistemas Digitales IIILuis Angel Nina SánchezAún no hay calificaciones
- Derecho EmpresarialDocumento1 páginaDerecho EmpresarialLuis Angel Nina SánchezAún no hay calificaciones
- Historia y Evolución de La AdministraciónDocumento4 páginasHistoria y Evolución de La AdministraciónLuis Angel Nina SánchezAún no hay calificaciones