También podría gustarte
- Fase 3 - Elaborar Documento de Aplicación de Conceptos de Probabilidad - Yineth - GonzalezDocumento15 páginasFase 3 - Elaborar Documento de Aplicación de Conceptos de Probabilidad - Yineth - GonzalezYineth Alexandra GonzalezAún no hay calificaciones
- Solucion EjerciciosDocumento8 páginasSolucion EjerciciosHoRte MendezAún no hay calificaciones
- MagnetismoDocumento19 páginasMagnetismoENRIQUE OSWALDO PAREDES MORENOAún no hay calificaciones
- Paso 1, Intereses de InvestigacionDocumento7 páginasPaso 1, Intereses de InvestigacionNORMAAún no hay calificaciones
- Mate Prismas PiramidesDocumento7 páginasMate Prismas PiramidesalejandraAún no hay calificaciones
- La Termodinamica de La VidaDocumento28 páginasLa Termodinamica de La VidaChatty Castillejos100% (1)
- Teorema de PitagorasDocumento3 páginasTeorema de Pitagorascristian renne GutierrezAún no hay calificaciones
- Documento 123Documento49 páginasDocumento 123Mirielis GonzalezAún no hay calificaciones
- Libro Urbanismo Del Cusco Inka 2ed PDFDocumento168 páginasLibro Urbanismo Del Cusco Inka 2ed PDFThalia Philco GarayAún no hay calificaciones
- Bredlow-Parménides o La Identidad ImposibleDocumento9 páginasBredlow-Parménides o La Identidad ImposibleLucía Martínez100% (2)
- Matriz Comparativa Demanda Independiente Vs DependienteDocumento6 páginasMatriz Comparativa Demanda Independiente Vs Dependientegiova0427Aún no hay calificaciones
- Libro Tareas PDFDocumento112 páginasLibro Tareas PDFJulio BarbozaAún no hay calificaciones
- Ejercicio #16Documento6 páginasEjercicio #16frank_luna_43Aún no hay calificaciones
- Formulario, Probabilidad y EstadísticaDocumento4 páginasFormulario, Probabilidad y EstadísticapepeAún no hay calificaciones
- Libro de OrtocaligrafiaDocumento7 páginasLibro de Ortocaligrafiaalis villaAún no hay calificaciones
- Balanceo Estatico Dinamico, Ordóñez-VasquezDocumento5 páginasBalanceo Estatico Dinamico, Ordóñez-VasquezJuan Esteban Ordoñez BonillaAún no hay calificaciones
- Estructura para El Informe de Investigacion HistoriaDocumento5 páginasEstructura para El Informe de Investigacion HistoriaEliana CarolinaAún no hay calificaciones
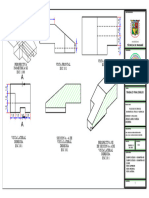
- Jesus Jahel Varela Moreira - Trabajo Final de DibujoDocumento1 páginaJesus Jahel Varela Moreira - Trabajo Final de Dibujomayra moreirazAún no hay calificaciones
- Actividad 1 Estadistica Inferencial Taller Sobre Distribucion de ProbabilidadDocumento10 páginasActividad 1 Estadistica Inferencial Taller Sobre Distribucion de ProbabilidadLaura AmayaAún no hay calificaciones
- MuestreoDocumento43 páginasMuestreoMarco Mendoza Sánchez100% (1)
- Genichi TaguchiDocumento11 páginasGenichi TaguchiJOSE ANTONIOAún no hay calificaciones
- Matematica IDocumento8 páginasMatematica IJosue GarciaAún no hay calificaciones
- Unidad 1 Matematica 6°Documento4 páginasUnidad 1 Matematica 6°Nadia CasanovaAún no hay calificaciones
- Examen de Unidad IIDocumento3 páginasExamen de Unidad IIYeltsin Huaman RaymondiAún no hay calificaciones
- Taller de Vias Alineamientos HorizontalesDocumento5 páginasTaller de Vias Alineamientos HorizontalesJoheddys CastilloAún no hay calificaciones
- Teoria Del Crecimiento Cobb DouglasDocumento3 páginasTeoria Del Crecimiento Cobb DouglasFabrizio OcampoAún no hay calificaciones
- SEMANA 2 p2q1Documento7 páginasSEMANA 2 p2q1FILBERTO QUISAGUANOAún no hay calificaciones
- La IntuicionDocumento29 páginasLa IntuicionAxl RedfieldAún no hay calificaciones
- Funciones Reales de Varias Variables.Documento50 páginasFunciones Reales de Varias Variables.Oscar Frias CamposAún no hay calificaciones
- BIOESTADÍSTICA - Pruebas ParamétricasDocumento10 páginasBIOESTADÍSTICA - Pruebas ParamétricasLUIS ENRIQUE BACALLA PAREDESAún no hay calificaciones