También podría gustarte
- Discriminación de Precios - ResumenDocumento10 páginasDiscriminación de Precios - ResumenIomira Torre CandiaAún no hay calificaciones
- Inferencia Bayesiana MCMC WinbugsDocumento46 páginasInferencia Bayesiana MCMC WinbugsManu StradlinAún no hay calificaciones
- Informe RecocidoDocumento3 páginasInforme RecocidoAnderson PatrixioAún no hay calificaciones
- Informe DurezaDocumento4 páginasInforme DurezaAnderson PatrixioAún no hay calificaciones
- Análisis I - Ejercicios de funciones y propiedades matemáticasDocumento140 páginasAnálisis I - Ejercicios de funciones y propiedades matemáticasAnderson PatrixioAún no hay calificaciones
- Proyecto IntegradorDocumento4 páginasProyecto IntegradorAnderson PatrixioAún no hay calificaciones
- Effect of The Impeller Imbalance On The Bendingmoment Acting On A Shaft in A Stirred VesselDocumento3 páginasEffect of The Impeller Imbalance On The Bendingmoment Acting On A Shaft in A Stirred VesselAnderson PatrixioAún no hay calificaciones
- Instructivo Homologacion Digital PDFDocumento14 páginasInstructivo Homologacion Digital PDFD Alejandro C UrregoAún no hay calificaciones
- Mapa MentalDocumento2 páginasMapa Mentalcasillas1961100% (1)
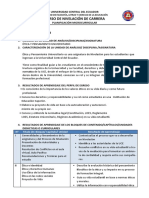
- Sílabo Epu-NivelaciónDocumento11 páginasSílabo Epu-NivelaciónAlexander PozoAún no hay calificaciones
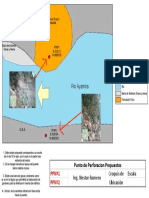
- Formacion Pozo (P-poz) Roca fracturada Rio AyamiraDocumento1 páginaFormacion Pozo (P-poz) Roca fracturada Rio AyamiraJunior Andia CarbajalAún no hay calificaciones
- Trabajjo para PresentarDocumento41 páginasTrabajjo para PresentarSergio Vera PozoAún no hay calificaciones
- Memoria Descriptiva (Caminos I)Documento20 páginasMemoria Descriptiva (Caminos I)Andy Greey Mera VásquezAún no hay calificaciones
- TDR DCH 2023-2Documento7 páginasTDR DCH 2023-2Mariana Lizeth Junco MunozAún no hay calificaciones
- Guia de Aprendizaje Unidad 2 PhotoshopDocumento7 páginasGuia de Aprendizaje Unidad 2 PhotoshopNicolas Gonzalez100% (1)
- PR. Modifica Res. 3753 de 2015 PRORROGA Reglamento Tecnico Vehiculos de PasajerosDocumento6 páginasPR. Modifica Res. 3753 de 2015 PRORROGA Reglamento Tecnico Vehiculos de PasajerosEduardo FlorezAún no hay calificaciones
- Matriz de Consistencia-VariablesDocumento3 páginasMatriz de Consistencia-VariablesClaudia Ñique RuminóAún no hay calificaciones
- Diapositivas Motores de Fondo, Perforacion DireccionalDocumento21 páginasDiapositivas Motores de Fondo, Perforacion Direccionalangelitoeldiablito100% (2)
- Derecho Procesal ApunteDocumento12 páginasDerecho Procesal ApunteRomina Silva TorresAún no hay calificaciones
- Tampico 1Documento6 páginasTampico 12-A Omar Santiago Moreno TorresAún no hay calificaciones
- Principios de arquitectura empresarial para la gestión de factores de impacto en entidades públicasDocumento7 páginasPrincipios de arquitectura empresarial para la gestión de factores de impacto en entidades públicasOscama2011Aún no hay calificaciones
- Valvula Ahorro de AguaDocumento17 páginasValvula Ahorro de AguaSergio Fabian Bayona ReyAún no hay calificaciones
- Planilla Tributaria y Cargas SocialesDocumento1 páginaPlanilla Tributaria y Cargas SocialesDavid MoralesAún no hay calificaciones
- Principio de Legalidad PresupuestarioDocumento24 páginasPrincipio de Legalidad PresupuestarioBryan SalazarAún no hay calificaciones
- Reporte de InvestigacionDocumento10 páginasReporte de InvestigacionRocio AguilarAún no hay calificaciones
- Auditoría marcas conformidadDocumento9 páginasAuditoría marcas conformidadChristian TéllezAún no hay calificaciones
- Manual Del Constructor Polpaico 40 287 1Documento40 páginasManual Del Constructor Polpaico 40 287 1Catalina Soto FernándezAún no hay calificaciones
- Novedades Prescom - 2011Documento8 páginasNovedades Prescom - 2011Danny Quispe TapiaAún no hay calificaciones
- Cotizacion Navi-Toyota Agua y DesgaueDocumento3 páginasCotizacion Navi-Toyota Agua y DesgaueAngel LopezAún no hay calificaciones
- Guarda y Custodia de Las EMODocumento5 páginasGuarda y Custodia de Las EMOYoni MachadoAún no hay calificaciones
- Ficha Tecnica Cabina SonoamortiguadaDocumento3 páginasFicha Tecnica Cabina Sonoamortiguadaclaudia gomezAún no hay calificaciones
- Curriculum VitaeDocumento3 páginasCurriculum VitaeFrancisco Lopéz100% (1)
- Electrotecnia 8 Calsin - Circuitos Serie AcDocumento16 páginasElectrotecnia 8 Calsin - Circuitos Serie AcNickAún no hay calificaciones
- Materiales de Ferreteria Taller de ArmasDocumento1 páginaMateriales de Ferreteria Taller de ArmasCOMANDO PROVINCIAL DE POLICIA MANABI N0.4Aún no hay calificaciones
- Selección y Evaluación de Personal - Jonathan Chavez MontalvoDocumento30 páginasSelección y Evaluación de Personal - Jonathan Chavez MontalvoJonathan Chavez MontalvoAún no hay calificaciones