También podría gustarte
- INFORME 5 Calor de DisolucionDocumento4 páginasINFORME 5 Calor de DisolucionIvan marcelo fuentes quilcaAún no hay calificaciones
- Memoria Benchmark-DanielGarcía PDFDocumento37 páginasMemoria Benchmark-DanielGarcía PDFdgm929Aún no hay calificaciones
- Catalogo Jaso Industrial Cranes PDFDocumento29 páginasCatalogo Jaso Industrial Cranes PDFALEXIA ANAI SOSA FLORESAún no hay calificaciones
- Elementos ConstructivosDocumento1 páginaElementos Constructivosdgm929Aún no hay calificaciones
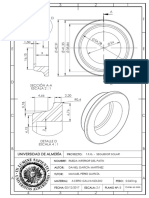
- Plano Rueda Inferior Del PatínDocumento1 páginaPlano Rueda Inferior Del Patíndgm929Aún no hay calificaciones
- Diseño Central CombinadaDocumento150 páginasDiseño Central Combinadadgm929Aún no hay calificaciones
- Datasheet 4099 Tuercas Hexagonales DIN 934 DIN en ISO 4032 DIN en 24032 - EsDocumento3 páginasDatasheet 4099 Tuercas Hexagonales DIN 934 DIN en ISO 4032 DIN en 24032 - Esdgm929Aún no hay calificaciones
- TABLASDocumento17 páginasTABLASdgm929Aún no hay calificaciones
- Catalo MotoreductoresDocumento2 páginasCatalo Motoreductoresdgm929Aún no hay calificaciones
- Ejercicios CalisteniaDocumento2 páginasEjercicios Calisteniadgm929Aún no hay calificaciones
- TABLAS CONCENTRACIÓN DE ESFUERZOS - WebctDocumento8 páginasTABLAS CONCENTRACIÓN DE ESFUERZOS - Webctdgm929Aún no hay calificaciones
- Gestión Monetaria Con Sistemas de TradingDocumento35 páginasGestión Monetaria Con Sistemas de TradingEDUARDO100% (1)
- Introduccion A MQL4Documento175 páginasIntroduccion A MQL4Mario Santibanez Lopez100% (1)
- IE-149. Eleccion Del Cable Segun El REBT. General Cable. BUENO PDFDocumento26 páginasIE-149. Eleccion Del Cable Segun El REBT. General Cable. BUENO PDFdgm929Aún no hay calificaciones
- Guia Selección CablesDocumento10 páginasGuia Selección CablesMiguel Parra MonederoAún no hay calificaciones
- Tablas Imax Instalaciones Subterraneas e Interior en Cobre PDFDocumento10 páginasTablas Imax Instalaciones Subterraneas e Interior en Cobre PDFdgm929Aún no hay calificaciones
- Bombeo Electro SumergibleDocumento39 páginasBombeo Electro SumergibleLeidy Tatiana Higuera GarciaAún no hay calificaciones
- Lab 1 de Mediciones Hidrologicas Estacion MeteorologicaDocumento36 páginasLab 1 de Mediciones Hidrologicas Estacion MeteorologicaMichaelIsiahRodriguezRiveraAún no hay calificaciones
- Soldadura Eléctrica Tig (Tungsten Inert Gas)Documento8 páginasSoldadura Eléctrica Tig (Tungsten Inert Gas)Edison OrbeaAún no hay calificaciones
- Cinética Química, Catálizadores SólidosDocumento16 páginasCinética Química, Catálizadores SólidosCarlos CorcueraAún no hay calificaciones
- Iglesia de Dios Unida - 01 Génesis Bajo El Lente de La Ciencia PDFDocumento123 páginasIglesia de Dios Unida - 01 Génesis Bajo El Lente de La Ciencia PDFAlex AndinoAún no hay calificaciones
- Ecuaciones químicas balanceadasDocumento20 páginasEcuaciones químicas balanceadasandrea vargasAún no hay calificaciones
- Flujo PotencialDocumento13 páginasFlujo PotencialBoneyAún no hay calificaciones
- Colectores Solares de Tubos Al Vacio b12Documento34 páginasColectores Solares de Tubos Al Vacio b12CarlosEduardoAcostaMateusAún no hay calificaciones
- PRACTICA Plasticos.Documento4 páginasPRACTICA Plasticos.Alejandro Diaz GarridoAún no hay calificaciones
- Suministro de combustible municipio ChinúDocumento8 páginasSuministro de combustible municipio ChinúAlberto Elias Valverde PerezAún no hay calificaciones
- Trabajo de SaponificacionDocumento4 páginasTrabajo de SaponificacionJoseph Crow SalazarAún no hay calificaciones
- Polimeros Avanzados-Unidad 1Documento91 páginasPolimeros Avanzados-Unidad 1itt_roberto_quintana50% (2)
- BIOMECANICADocumento59 páginasBIOMECANICAJorge CeballosAún no hay calificaciones
- Taller Hidraulica VFDocumento25 páginasTaller Hidraulica VFleidy paola rincon carvajalAún no hay calificaciones
- Informe Final Pastas DentalesDocumento7 páginasInforme Final Pastas Dentales4606115502100% (1)
- Polietileno - Aislante ElectricoDocumento22 páginasPolietileno - Aislante ElectricoSebastian Salazar PinoAún no hay calificaciones
- Vueltas de TuberiaDocumento7 páginasVueltas de TuberiaTatiana Ines Echeverria TroyaAún no hay calificaciones
- Balanza CuantiDocumento9 páginasBalanza CuantiCocarico Quispe Jhoseline RosyAún no hay calificaciones
- IDENTIFICACION DE FUNCIONES INORGANICAS InformeDocumento18 páginasIDENTIFICACION DE FUNCIONES INORGANICAS InformeSandra Milena Forigua CastiblancoAún no hay calificaciones
- Ejemplo Losas Armadas en Dos DireccionesDocumento16 páginasEjemplo Losas Armadas en Dos DireccionesJulio Cesar Cordova CalleAún no hay calificaciones
- Fisica IiiDocumento58 páginasFisica IiiCharrezMarazaJhonAún no hay calificaciones
- Choque Elástico e InelásticoDocumento8 páginasChoque Elástico e Inelásticolouch100% (1)
- Masoller AF Tema4 PDFDocumento27 páginasMasoller AF Tema4 PDFedna catherineAún no hay calificaciones
- TG AleDocumento1 páginaTG AleGeraldine Andrade RamirezAún no hay calificaciones
- UNIDAD III Soluciones Corregido 1 de MarzoDocumento76 páginasUNIDAD III Soluciones Corregido 1 de MarzoGuido BritoAún no hay calificaciones
- Tungsteno UllmannDocumento28 páginasTungsteno Ullmannclaire moonAún no hay calificaciones
- Resumen ConcretoDocumento7 páginasResumen ConcretoCeron JimenezAún no hay calificaciones
- Aplicaciones Del CobreDocumento2 páginasAplicaciones Del CobreAngelHLAún no hay calificaciones
- E.E.T.T SalaDocumento12 páginasE.E.T.T SalaSimon CorreaAún no hay calificaciones