También podría gustarte
- 2-Evaluación Psicopedagógica Jesús García VidalDocumento18 páginas2-Evaluación Psicopedagógica Jesús García VidalLosiram ZeraviloAún no hay calificaciones
- Silabo de Estudio Del Trabajo Ii: I. IdentificaciónDocumento7 páginasSilabo de Estudio Del Trabajo Ii: I. IdentificaciónRoberto Alfonso Diaz PerezAún no hay calificaciones
- Guia de Ejercicios de Varianza y Desviación EstándarDocumento3 páginasGuia de Ejercicios de Varianza y Desviación Estándaryalide43% (7)
- Guia de Activiades y Rubrica de Evaluación Tarea 2 - Aplicar Los Costos Por Órdenes de ProducciónDocumento10 páginasGuia de Activiades y Rubrica de Evaluación Tarea 2 - Aplicar Los Costos Por Órdenes de ProducciónVictoria MartinezAún no hay calificaciones
- Proyecto Educativo VOR-DMEDocumento15 páginasProyecto Educativo VOR-DMEMarcelo ClivioAún no hay calificaciones
- ESTADISTICA DESCRIPTIVA VitutorDocumento212 páginasESTADISTICA DESCRIPTIVA VitutorRaul Lopez Janampa100% (1)
- Proceso Dirección de Formación Profesional Integral Guía de AprendizajeDocumento26 páginasProceso Dirección de Formación Profesional Integral Guía de AprendizajeLouryn DanielaAún no hay calificaciones
- Guía Práctica #8 Atencion, Memoria y AprendizajeDocumento6 páginasGuía Práctica #8 Atencion, Memoria y AprendizajeEleazard Cesard Hazard Bel FiAún no hay calificaciones
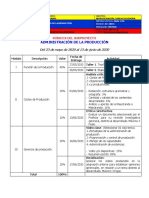
- Rúbrica ADMINISTRACIÓN DE LA PRODUCCIÓN PDFDocumento1 páginaRúbrica ADMINISTRACIÓN DE LA PRODUCCIÓN PDFDanny OrasmaAún no hay calificaciones
- Resumen Unidad5 AuditoriaDocumento4 páginasResumen Unidad5 AuditoriaDhamarPradoAún no hay calificaciones
- Ejemplo Evaluación CIDocumento5 páginasEjemplo Evaluación CIDexy Gutierrez ManrikAún no hay calificaciones
- Metodología de Trabajo en EquipoDocumento115 páginasMetodología de Trabajo en EquipoJohan Jesus Llanos BerdugoAún no hay calificaciones
- Informe de Actividades I.E.D. San Juan de RiosecoDocumento5 páginasInforme de Actividades I.E.D. San Juan de RiosecoJose Luis SanchezAún no hay calificaciones
- Cronograma de Vídeo ConferenciasDocumento1 páginaCronograma de Vídeo ConferenciasMilagros BenitesAún no hay calificaciones
- Cuestionario de MatematicasDocumento2 páginasCuestionario de Matematicasdarjalben100% (1)
- Muestreo Por ConglomeradosDocumento12 páginasMuestreo Por ConglomeradosAlexhta0% (1)
- Fase 4 - Análisis de Resultados Actividad GrupalDocumento42 páginasFase 4 - Análisis de Resultados Actividad Grupaljuan carlos farak gonzalezAún no hay calificaciones
- CONSTRUCCION DE OBRAS VIALES SilaboDocumento7 páginasCONSTRUCCION DE OBRAS VIALES SilaboPaulo Chullunquia100% (3)
- Diseño Metod - Cualitativo y MixtoDocumento45 páginasDiseño Metod - Cualitativo y Mixtobarreirosanchez984Aún no hay calificaciones
- Semana 3 Medidas de Tendencia CentralDocumento68 páginasSemana 3 Medidas de Tendencia CentralChristian GutierrezAún no hay calificaciones
- Evaluación para Tomar Decisiones.Documento6 páginasEvaluación para Tomar Decisiones.Patricia Helen AlarconAún no hay calificaciones
- Informe - Personal Sacúdete - Carlos Jiménez PDFDocumento3 páginasInforme - Personal Sacúdete - Carlos Jiménez PDFJavier Velandia Zona XAún no hay calificaciones
- Ejercicios y Problemas de EstadísticaDocumento5 páginasEjercicios y Problemas de EstadísticarobertoAún no hay calificaciones
- Rúbrica-Obtenido EducarchileDocumento4 páginasRúbrica-Obtenido EducarchileLytaLiAún no hay calificaciones
- Consolidado 1 - Paso 2 - Actividad de Límites y ContinuidadDocumento61 páginasConsolidado 1 - Paso 2 - Actividad de Límites y ContinuidadMª Zulma AlarconAún no hay calificaciones
- Artes Plásticas y Diseño - ProgramaciónDocumento305 páginasArtes Plásticas y Diseño - ProgramaciónDonna100% (1)
- 3.4 Competencias de Auditores SGCDocumento4 páginas3.4 Competencias de Auditores SGCAdri AlvRamAún no hay calificaciones
- Instrumentos de EvaluaciónDocumento27 páginasInstrumentos de Evaluaciónisrael261100% (2)
- A Gestion Del Talento HumanoDocumento5 páginasA Gestion Del Talento HumanoRonald C-MAún no hay calificaciones
- Unidad 2. Metodologia de La Auditoria AdministrativaDocumento20 páginasUnidad 2. Metodologia de La Auditoria Administrativarociompt100% (4)