También podría gustarte
- Sistema de Producción Toyota - Wikipedia, La Enciclopedia Libre PDFDocumento7 páginasSistema de Producción Toyota - Wikipedia, La Enciclopedia Libre PDFLennyAún no hay calificaciones
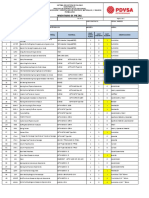
- INVENTARIO DE PIEZAS 52-P-5204 NuevoDocumento2 páginasINVENTARIO DE PIEZAS 52-P-5204 NuevoLennyAún no hay calificaciones
- Diseño de Un Generador de Espuma para La Producción de Concreto CelularDocumento16 páginasDiseño de Un Generador de Espuma para La Producción de Concreto CelularLenny100% (2)
- EmpavonadoDocumento6 páginasEmpavonadoLennyAún no hay calificaciones
- Procedimiento Flotabilidad y EstabilidadDocumento7 páginasProcedimiento Flotabilidad y EstabilidadCarlos RoblesAún no hay calificaciones
- GPRS ArduinoDocumento40 páginasGPRS ArduinoBoris PQAún no hay calificaciones
- Cuadro de Mando de Indicadores KPIDocumento2 páginasCuadro de Mando de Indicadores KPIdavtitoAún no hay calificaciones
- 703 Propiedades Fisicas y Quimicas de La MateriaDocumento4 páginas703 Propiedades Fisicas y Quimicas de La MateriaJulieth SantosAún no hay calificaciones
- Contaminacion de SuelosDocumento61 páginasContaminacion de SuelosAnghela Ortiz FloresAún no hay calificaciones
- Fibras InorganicasDocumento2 páginasFibras InorganicasLUIS FERNANDO TORRES BARONAún no hay calificaciones
- GUÍA DE LABORATORIO N°2 - CyT 4° - La Lluvia Ácida y Los Huevos de Las AvesDocumento4 páginasGUÍA DE LABORATORIO N°2 - CyT 4° - La Lluvia Ácida y Los Huevos de Las Avesjuandiegoadauto305Aún no hay calificaciones
- Informe N° 1 TopografiaDocumento17 páginasInforme N° 1 TopografiaJhoel ChavezAún no hay calificaciones
- Practica 2 Fisica IDocumento6 páginasPractica 2 Fisica IAlixter Jesus RamirezAún no hay calificaciones
- Proyecto-Compactador de LatasDocumento8 páginasProyecto-Compactador de LatasAgus RodriguezAún no hay calificaciones
- Sensor InductivoDocumento3 páginasSensor Inductivojean paul arones huamaniAún no hay calificaciones
- Norma IramDocumento6 páginasNorma IramPepe Salazar50% (2)
- Tarifa de Precios de Sennheiser 2005Documento12 páginasTarifa de Precios de Sennheiser 2005djshantiAún no hay calificaciones
- Reporte 5 PavimentosDocumento21 páginasReporte 5 PavimentosAndres Felipe ChavezAún no hay calificaciones
- Chema WeldDocumento2 páginasChema WeldJORGE LUISAún no hay calificaciones
- Ensayos Eléctricos en Baja Tensión 1Documento49 páginasEnsayos Eléctricos en Baja Tensión 1Paul CruzAún no hay calificaciones
- Metrado de Tuberias y Accesorios para SanitarioDocumento18 páginasMetrado de Tuberias y Accesorios para SanitarioSergio Antonio ErazoAún no hay calificaciones
- Hidrogeología Cuenca Río Caplina - Ing. Fluquer Peña LDocumento46 páginasHidrogeología Cuenca Río Caplina - Ing. Fluquer Peña LCarlos VásquezAún no hay calificaciones
- Grupo 9 - Ejercicios de CargasDocumento19 páginasGrupo 9 - Ejercicios de CargasCristian SG100% (2)
- 0d2 - Dia Cable SubmarinoDocumento19 páginas0d2 - Dia Cable SubmarinomagoicoAún no hay calificaciones
- Servicio de Mantenimiento New ActrosDocumento15 páginasServicio de Mantenimiento New ActrosLuis Arturo Castro San Martin100% (1)
- Marco Teorico Informe 2 Lab SuelosDocumento2 páginasMarco Teorico Informe 2 Lab Suelosomar anthonyAún no hay calificaciones
- Posicion Plana y HorizontalDocumento17 páginasPosicion Plana y Horizontaljesus landa galarza100% (1)
- Materiales-Puzolanicos-Alternativos (Tarea 2)Documento4 páginasMateriales-Puzolanicos-Alternativos (Tarea 2)Alex HernandezAún no hay calificaciones
- Historia de Las FresadorasDocumento3 páginasHistoria de Las FresadorasAlejandro ManriqueAún no hay calificaciones
- Causas de Desbalanceo en Máquinas RotativasDocumento8 páginasCausas de Desbalanceo en Máquinas RotativasGessica CañasAún no hay calificaciones
- REPORTEMUSEODocumento5 páginasREPORTEMUSEOSalinas Hernández Karla YaninAún no hay calificaciones
- Wichmann, Eyvind H. - Berkeley Physics Course. Vol. 4 Física Cuántica. 4-Reverté (1972)Documento503 páginasWichmann, Eyvind H. - Berkeley Physics Course. Vol. 4 Física Cuántica. 4-Reverté (1972)Anonymous D3SZ9MgrrDAún no hay calificaciones
- Lista de Ejerciciosfs1Documento5 páginasLista de Ejerciciosfs1Adriann MauricioAún no hay calificaciones
- FisicaDocumento2 páginasFisicaXimena Zoé Tovar ChávezAún no hay calificaciones