100% encontró este documento útil (2 votos)
1K vistas25 páginasDivirtiendome Con MBot
divirtiéndome con Mbot
Cargado por
Tecnat TecnologiaDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF o lee en línea desde Scribd
100% encontró este documento útil (2 votos)
1K vistas25 páginasDivirtiendome Con MBot
divirtiéndome con Mbot
Cargado por
Tecnat TecnologiaDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF o lee en línea desde Scribd
Descubre los Packs de extension para mBot
Nota del editor
Makeblock te ofrece gran variedad de estructuras y médulos electréni-
cos para ampliar las posibilidades de tu robot y hacer con él un montén
de cosas molonas ce
. Mini Brazo Articuladé Pack de patas 7
. Mini Garra
. Matriz de Leds
a Display * | a
, ARDUINO
Esta guia impresa es el extracto de un libro mas extenso (con el
mismo nombre) en formato digital PDF que puedes descargar gratis
en Makeblock.es. Para consultas técnicas también puedes:
Consultar la seccién de Soporte
https://www.makeblock.es/soporte/
Participar en nuestro Foro
http://www.makeblock.es/foro/
Llamarnos directamente
Makeblock
Esperamos que te guste y muchas gracias por tu interés,
Makeblock Espafia
info@makeblock.es
945 29 80 50
‘open source
jardware
Divirtiéndome con mBot
RRS
Titulo original: Divirtiéndome con mBot: Guia de manejo y programacién
Autor: Susana Oubifia Falcén
Disefio de la portada: Makeblock Espafia
4° Edicion: junio, 2016
Editor: Prodel S.A.
ISBN-13: 978-84-608-9278-6
“Divirtiéndome con mBot": Guia de manejo y programacién’, por Susana Oubifia Faloén, es
publicado bajo la licencia Creative Commons Reconocimiento 4.0 Internacional License.
Pagina 1
Divirtiéndome con mBot
CE een
indice
1. Introducciér
2. Guia de inicio rapido.
2.1- Usando el pulsador de Ia placa.
2.2- Usando el mando de infrarrojos... .
2.3- Programa el mBot para que haga lo que tu quiera:
2.4- Conecta el robot con tu ordenador .....sse
Ejercicio 1: Encender las luces de colores al pulsar el boton.
Ejercicio 2: Andar hasta que encuentre un obstéculo.....
2.5- Como grabar el programa en la placa...
3. Otros ejemplos de programacién
3.1. Médulo de ultrasonids ..
3.2, Motores.....
3.3, Motor y deteccién ultrasénica
3.4, Diodos LED RGB de la placa.......
3.5, Detector de linea......
3.6. Matriz de LEDs 816
3.7. Servomotor,
3.8. Mini Gripper.
3.9, Mini brazo articulado ..
3.10. Sensor de sonido...
3.11, Potenci6metro ..rnuse
3.12. Médulo Display 7 segmentos.....1....
3.13. Médulo Micro Switch
4. Referencias de interés,
Pagina 2
Divirtiéndome con mBot
1. Introduccion
MBot es un robot de 400 gramos basado en Arduino Uno y creado por Makeblock. Se
puede alimentar por USB, por bateria de litio 0 a través del conector del portapilas con
4 baterias AA
En cuanto a su programacién y control, hay 4 opciones: se puede programar desde
mBlock, un software de programacién grafica basado en Scratch 2.0, también se
puede controlar mBot directamente, sin necesidad de programacion, desde una tablet
© desde un Smartphone, gracias a su app (para Android 0 iOS) y a la posibilidad de
acoplarle el médulo bluetooth. Ademés, el robot es muy versatil ya que podemos usar
Arduino con mBot, programando mBot con el IDE de Arduino y no sélo con mBlock. En
este Ultimo caso, necesitamos instalar las librerias de Makeblock en el IDE de Arduino.
Librerias disponibles en la casa comercial para libre descarga a los usuarios.
Finalmente, la Ultima opcién es programarlo con el software mBlockly (para iPad)
Este documento se centrara en la programacién del robot mBot desde el programa
mBlock. Software que veo muy apropiado para el alumnado de la ESO ya que
combina scratch con arduino en diferentes placas y robots (y no s6lo con mBot).
Conectar el mBot
El robot mBot utiliza la placa mCore que puede verse en la imagen inferior. La placa,
con un microconcrolador ATmega238, dispone de 4 puertos con conexiones RJ25
para conectar sensores y dos puertos para conectar motores. Ademas, mCore integra
Un interruptor de encendido, un botén, dos LEDs RGB, dos LEDs normales, un buzzer,
un sensor de luminosidad y un sensor de infrarrojos receptor-emisor.
Pagina 3
Divirtiéndome con mBot
Placa mCore
La descarga del software mBlock, tanto para Windows como para iOS, puede hacerse
desde el siguiente link: www.mblock.cc
Tras abrir el programa mBlock, lo primero que debemos hacer es conectar el robot al
software que lo controlaré. Para ello, conectamos el cable USB desde el mBot al
ordenador. En ese momento, silos drivers de mBot estan instalados, se nos habilita un
Puerto COM de comunicacién para realizar la conexién. En nuestro caso, nuestro
puerto es el COM22, como puede verse en la siguiente imagen. Si queremos conocer
e! puerto que utiliza nuestro PC en ese momento, en Windows? podemos acceder a
Equipo>Administrador de dispositivos, en el apartado de Puertos (COM y LPT)
4°97 Puertos (COMy LPT)
9 Communications Port (COM!)
XP Sere estindar sobre el vinculo Bluetooth (COMI2)
XP Serie estndor sobre el vinevlo Bluetooth (COMI3)
XP See estinder sobre el vinculo Bluetooth (COM24)
1P Sere estindar sobre el vinculo Bluetooth (COM2S)
°F Seve estindor sobre el vinculo Bluetooth (COM26)
"F Serie esténdar sobre el vinculo Bluetooth (COM27)
17 Sete estindar sobre el vnculo Bluetooth (COM3E)
"F Sere estindar sobre el vinculo Bluetooth (COMA)
Pip us8-seriaL cH240 (COM22) |
Puerto de conexién USB-SERIAL CH340
Ya en el programa mBlock, vamos a la pestafia “Placas” y escogemos mBot para
finalmente, ir a la pestafia “Conectar” del mend principal y en su apartado Serial Port,
seleccionar el puerto de conexién COM22 (0 el que corresponda a tu placa):
-—_-_oo SS
Pagina 4
Divirtiéndome con mBot
Piacas Gatensiones Lenguaje Ayu
,
com.
connz
conn
D comzz
coms
Arduino Uno
‘Ardin Leonardo
‘Ardvine Nano (megi328)
‘dine Megs 1289
‘Arduine Megs 25
coM25
ac] Ver ebéigo comes
‘igs Instalar Diver de Arduino cona7
%
a CON38
PicoBoard COM41
En caso de no conectar, s6lo debemos revisar si hemos instalado el driver de arduino
que nos proporciona el puerto de conexion USB-SERIAL CH340. Este driver puede
instalarse directamente desde el programa mBlock, a través de la pestafia Conectar
usando la opcién Instalar Driver de Arduino:
En el bloque observamos que mBot esta conectado (circulo en verde):
fee
Fconia
Isensores
Poperador
Dioatenca
[[ sonido
[spe
J patos y Bioques
mBot ¥
Nuestro trabajo ahora, sera simplemente programar el robot utilizando los diferentes
bloques que nos proporciona mBlock. El software mBlock nos permite conectamos con
el robot por puerto USB (que es lo que hemos hecho hasta ahora), por Bluetooth o por
2.46.
Pagina 5
Divirtiéndome con mBot
a
2. Guia de inicio rapido
2.1- Usando el pulsador de la placa
El robot viene programado de fabrica con 3 programas diferentes que podemos activar
mediante el pulsador que se encuentra en la parte delantera de la placa o también
desde el mando de infrarrojos
Con el mBot inicialmente parado y el interruptor de encendido en posicién On:
Pulsamos 4 vez
Se activa el programa de deteccién de obstaculos. El robot se moveré de forma
auténoma esquivando los obstaculos que encuentre
Pulsamos una 2* vez
Se activa el programa sigue-lineas, el robot sera capaz de seguir una linea negra
dibujada en el suelo. También puedes usar la plantilla con la linea negra incluida con
tu mBot
Con la 3* pulsacion
El mBot se para y vuelve a su estado inicial
2.2- Usando el mando de infrarrojos
Con el mando de infrarrojos podemos usar los 3 programas cargados en el mBot
pulsando las siguientes teclas:
‘A: Activamos el control manual para poder manejar el robot con las flechas del mando
8: Se activa el programa de deteccién de obstaculos
C: Activamos el programa de sigue-lineas
Pagina 6
Divirtiéndome con mBot
ee eeeeeeEeeeeeee
2.3- Programa el mBot para que haga lo que ti quieras
Puedes programar tu mBot con mBlock, un entorno grafico desarrollado por Makeblock
basado en Scratch 2.0
Descargalo desde _http:/Avww.mblock.cc/download
2.4- Conecta el robot con tu ordenador
Para programarlo puedes usar el cable USB, pero se recomienda hacerlo sin cable
para tener mayor libertad de movimientos. Dependiendo de la versién de tu kit podras
usar el médulo bluetooth o el médulo de radiofrecuencia 2.46
Nota: Sino puedes conectarte usando el cable USB puede que necesites seguir los
pasos de la opcién “Instalar Driver de Arduino”
Eaiiee re
Archivo Editar | Conectar Placas rns Lenguaje Ayuda
Desde el menti “conectar’ también podras realizar las otras acciones
- Actualizar Firmware
Si le has cargado algun programa personalizado a tu robot y quieres seguir usando
mBlock deberas Actualizar el Firmware usando el cable USB y esperar a que finalice la
carga
- Restaurar Programa Predeterminado
Carga en tu mBot el programa de Fabrica (ver seccién 1) usando el cable USB
Pagina 7
Divirtiéndome con mBot
nS a
Ejercicio 1: _Encender las luces de colores al pulsar el botén
Vamos a hacer que siempre que pulsemos el botén de la placa se enciendan las luces
de color rojo, al cabo de un segundo pasen a color azul y luego se apaguen.
Nota: Las luces LED de colores pueden mostrar cualquier color usando una
combinacién de los 3 colores principales RGB (Rojo, Verde y Azul) dando un valor de
entre 0 y 255 a cada color.
Fjecutar el programa
‘Si hemos conectado nuestro mBot al PC mediante una de las opciones vistas en el
apartado 2.2, podemos poner en marcha nuestro programa presionando la
banderita verde, y posteriormente encender las luces del mBot al pulsar el botén de
la placa
Deaton ee)
Nectar Placas Extensiones Lenguaje /
Pe @ Pevramas | 0
[ioamieno
© Boz
Posts yatoqes
mBot ¥
Pagina 8
Divirtiéndome con mBot
ood
Ejercicio 2: Andar hasta que encuentre un obstaculo
EI mBot esperaré hasta que pulsemos el botén de la placa, y en ese momento sonara
una musica compuesta por 4 notas y empezaré a caminar hasta que encuentre un
‘obstaculo a menos de Sem
ne on note GZ) beat Gir
Pn: Loe
ae need 2. Tie
ultra:
velocidad @
Nota: Para que el sensor de ultrasonidos no trabaje en exceso, hacer una pausa de 0.3
segundos en cada vuelta.
2.5 Como grabar el programa en la placa
Puedes grabar el programa de forma permanente en tu robot.
- Sustituye el bloque de la banderita verde por el de ‘mBot Program” (ver imagen)
= Conecta el mBot por cable USB (ver apartado 2.1 “Serial Port’)
= Haz click con el botén derecho sobre “mBot Program” y posteriormente en “Upload to
arduino” (1 y2)
Girisoc ties ie) Back | | Upload to ‘Arduino
1 finclude
x0 | 2#include
3 #include
4
S #include
Pagina 9
Divirtiéndome con mBot
a
‘Si queremos volver a realizar otro programa en Scratch tendremos que cargar el
firmware para que nuestro mBot se pueda conectar con el software mBlock y recibir
6rdenes en tiempo real (ver imagen apartado 2.1)
ee
Pagina 10
Divirtiéndome con mBot
a
3. Otros ejemplos de programacién
3.1, Médulo de ultrasonidos
Un médulo de ultrasonidos nos proporciona un dato numérico que se corresponde con
la distancia entre el sensor y cualquier objeto que esta en frente de él. Por lo tanto, se
utiliza para medir distancias, logrando detectar objetos que se encuentran a 3 0 4cm
del sensor. Su color ID es amarillo y eso significa que puedo conectarlo a cualquiera
de los cuatro puertos de una placa mCore del mBot.
Médulo ultrasonidos.
‘Supongamos que lo conectamos al puerto 1 de la placa mCore del robot. El siguiente
script, nos mostrara la distancia que mide en el escenario de! mBlock:
Sellielery Puertot * |
También podemos controlar el movimiento del ratén con el sensor de ultrasonidos.
Una forma seria con el siguiente script:
ee
Pagina 11
Divirtiéndome con mBot
Sees
Comer:
or de ultrasonidos (MSTEERA
cri
4 200)
irae a ee leo
Puertoz
fees)
fare
NOTA: Ojo, hay que ver en qué puerto de los 4 tenemos conectado nuestro sensor de
Ultrasonidos. El puerto tipico para el mBot suele ser el puerto 3.
3.2. Motores
El robot mBot se compone de dos motores de continua de 6V @ 200rpm. En la placa,
estos motores se denotan por M1 y M2, pudiendo variar su velocidad, a la hora de
programarios, desde 0 a 255, El valor minimo, 0, es la velocidad més lenta y 255 es la
mas rapida. Los valores negativos harén que gire en el otro sentido (rotacién inversa).
Motor DC 6V/2007pm
Podemos programar, por ejemplo, el movimiento de los motores a través del teclado
del ordenador, al presionar o liberar una tecla. Debemos decidir qué ocurrira cuando
presiono la tecla “X" y qué ocurrira cuando dejo de presionar la tecla "x".
Por ejemplo: Cuando pulse la tecla “flecha arriba" los dos motores comienzan a
funcionar hacia adelante, con una velocidad de 100, pero, cuando deje de presionar
esa tecla, se pararan.
rr tt
Pagina 12
Divirtiéndome con mBot
Sure fecha arriba ™
ct
=
Para que gire hacia la izquierda, debemos poner el motor izquierdo a 0 (M1 o M2,
dependiendo de cémo se conecteran') y el derecho a una velocidad (M1 0 M2) por
ejemplo de 100. Al dejar de presionar, se debe parar. En el ejemplo que vemos en la
Siguiente figura, M1 es el motor izquierdo y M2 el derecho:
Se puede mejorar el script anterior haciendo que M1 gire en el sentido contrario, con
velocidad -100. El movimiento de control completo en un coche seria:
vando teda SESTETEENE es liberada
oem ocdad Gy
emu 2 Merete ho)
TERS fecha abajo 7]
Drache ete
fiiar motor QE velocidad @tED
cuando teda (RSSETERE es liberada
fijar motor QI) velocidad GD
game "2 Sereno)
fiiar motor GI velocidad GED
fiiar motor QE velocidad
BE fieche auierda » POE
Como: Seto)
fijar motor QEB veloadad @
Same "echo cerecha 7
Grane Seeeeee 100)
fijar motor QES) vel
uando teca FESSREPSINE es liberada
Drug “1 PeSeeteey 0”)
Grtaues Weererh O°)
‘Script para e! movimiento de los motores con el teclado
"En teoria, M1 es el izquiecdo y M2 el derecho, pero podemos cambiarlos
—e—eOoO——————————__
Pagina 13
Divirtiéndome con mBot
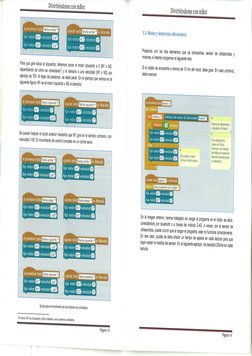
3.3. Motor y deteccién ultrasénica
Podemos unir los dos elementos que ya conocemos, sensor de ultrasonidos y
motores, e intentar programar el siguiente reto:
Si el objeto se encuentra a menos de 10 cm del robot, debe girar. En caso contrario,
debe avanzar.
j erase ee
‘Sensor de ulrasonidos
conedtado alPuerto3
far motor CE frirrsssircicamaa
Gagnon 2") ‘Siel objeto esta a
‘menos de 40cm,
‘entonces, los motores
Cae eet so) ‘del mBot se mueven en
i ‘Siel objetono esta ireccion contara (ira
cereaa, el robot avanza aladerecha)
4 4
men: Memento)
iar motor QE velocidad
En la imagen anterior, hemos trabajado sin cargar el programa en el robot, es decir,
Conectandolo por bluetooth o a través del médulo 2.4G. A veces, con el sensor de
ultrasonidos, puede ocurrir que al cargar el programa, este no funcione correctamente.
En ese caso, quizés se deba aftadir un tiempo de espera en cada lectura para que
ogre captar la medida del sensor. En el siguiente ejemplo, he decidido 200ms en cada
lectura:
__ ee.
Pagina 14
Divirtiéndome con mBot
mac tet
eae cd
fijar (OREWEABA 2 distancia del sensor de ultrasonidos (GI
esperar GE) segundos
si Distancia < {J entonces
a velocidad @)
ry
peo
—_—_———
Pagina 15
Divirtiéndome con mBot
3.4, Diodos LED RGB de la placa
La placa mCore dispone de dos RGB incrustados en la misma y que se denominan
“led abordo". En el siguiente ejemplo, vamos a modificar e! programa anterior
afiadiendo: el encendido de los LEDs en rojo (precaucién), verde (adelante) y apagado
de los LEDs.
Sensor de utrasonidos
ee conedade alPustos
ae eo Tee ee
[peas Ree EC ‘Stel objeto esté.a
bed @ menos de 10cm,
far motor CEM veloddad entonces, los motores:
a del mBot se mueven en
ireccién contratia (gira
fa derecha). Los dos
Gea" Peeereey 0°) LEDs estén entojo.
Cae eee)
: Siel objeto no est cercaa, el robot
‘vanza, Los dos LEDs estin en verde
4
Ry <---.
CMe ec oborco ee occ LO OR OR) ~
Come: Peet 0)
fijar motor QED velocdad @
LEDs apagados
pagades
Los valores numéricos de cada color del LED RGB estan comprendidos entre 0 y 255.
Combinando los tres colores podemos crear cualquier color del arcoiris. Para
conseguir el blanco, los tres colores (rojo, verde y azul), deben estar a 255.
‘Como se puede ver en la siguiente imagen, el amarillo lo conseguiriamos combinando
el rojo con el verde (poniendo, por ejemplo, el rojo a 125, el verde a 126 y el azul a 0):
Divirtiéndome con mBot
rte
3.5. Detector de linea
Este médulo sensor hace posible que nuestro robot se mueva a lo largo de una linea
negra sobre el suelo. En el kit mBot se sitta en su parte frontal funcionando por
reflexion. En nuestro mBot, como el color de su ID es azul, lo podemos conectar a los
puertos 1, 2, 3 y 4. En los ejemplos que siguen, usaremos el Puerto 2 de! mBot
EI Médulo V2.2 esta disefiado para detectar una linea negra. Cada médulo tiene dos
Partes: un LED /R que emite y un fototransistor IR que recibe la sefial. Gracias a ellos
Podras medir si estés sobre una linea negra y seguirla sobre un fondo blanco o
viceversa. Los dos sensores de un médulo indican si estan en "algo" negro o en “algo”
blanco, y por lo tanto, se podrian programar para ser usados como seguidores de linea
blanca. Ese “algo” blanco 0 “algo” negro no es, literalmente, el color blanco y negro, y
me explico. El sensor, a todo color brillante lo detecta como blanco, asi como, un color
mate oscuro, lo detectard como negro.
A la hora de programar el sensor, se nos pueden dar 4 posibilidades. Eventualidades
que el sensor de la casa Makeblock, tiene, implicitamente definidas con los siguientes
valores numéricos: 0,1, 2 y 3. Estos se describen como sigue:
- 0 es el valor numérico que representa que el sensor esté totalmente encima de
la linea negra.
- 3.es el valor numérico que representa que el sensor esta totalmente encima de
la linea blanca,
- 1y2 son los valores numéricos que se asocian cuando un lado del sensor est
fuera de la linea negra, mientras el otro lado estd en el color negro.
Las 4 posiciones pueden verse gréficamente en la siguiente imagen:
Ma Serna Ree eed
—n—m—[€———__—— —
Pagina 17
Divirtiéndome con mBot
A) Seguidor de linea negra: En el siguiente ejemplo, he querido que se accione al
Pulsar la tecla espacio. Tras presionar la tecla espacio, mBot ejecuta el
siguiente programa: testea si mBot ve completamente la linea oscura y, si es
asi, se mueve recto. De lo contrario, testea si mBot esté a la izquierda (a la
derecha) y, si lo esta, gira a la derecha (izquierda) y hace que mBot regrese a
la linea de negra. Si mBot esté lejos de la linea de negra, vuelve a la linea de
color negro. Repite el ciclo hasta que deje de presionar la barra espaciadora
En su programacién, crearemos dos bloques (derecha e izquierda) con entradas
numéricas que denoto por la variable "Velocidad":
Viéndolo frontalmente: Supongamos (debemos comprobar las conexiones de los
motores de nuestro mBot) que /a rueda izquierda del mBot corresponde al motor 1 y la
1ueda derecha corresponde al motor 2, tal y como se muestra en la siguiente figura:
Pagina 18
Divirtiéndome con mBot
Robot mBot
En estas condiciones, cuando ejecutamos el Bloque "M_Izquierdo", se ejecutan sus
comandos. El valor 30 (-50, 0, 50, 100, 250*) en el bloque "M Izquierdo" y
“M_Derecho”, reemplazaré al valor “Velocidad”. En este ejemplo, las velocidades de
rotacién del motor 2 y del motor 1 serdn de 30:
Cernig nueecr a Meee et)
eee Breet ma)
M_Izquierdo €D)
Finalmente, el seguidor de linea mostraria el ‘siguiente script: Al pulsar la barra
espaciadora (mantenla pulsada), mBot comienza a juzgar el estado de los sensores de
patrullaje de la linea (0, 1, 2, 3). La rotacion del motor depende de Ia desviacién, que
facilita el ajuste de la direccién de mBot. Podemos incluso incluir comandos de
‘operacién, como se ve en el siguiente script:
7 En teoria, no debernos sobropasar estas velocidades para no forz
——_—___ee—ee—————S—S———
Pagina 19
Divirtiéndome con mBot
cea Peeneer eeeers
een 2)
Cogueaa: Meese Rees
Vapor eateya es
berate ance
M_Izquierdo €)
eee Paaes oe Se
eee Sree ab str
(Miderecho a al sear
eo) See
PS TORS oH, TG
Estd completamente tuera
de lalineanegra. Debe
vover
4
Geen) eso2co - Perey
detener ERIE en el objeto ~|
Comea 2}
=)
Ten en cuenta en el sigue-lineas que: si devuelve un 0 es que va por buen camino, si
devuelve un 1 habria que girar hacia la izquierda, si devuelve un 2 habria que girar
hacia la derecha y si devuelve un 3 es que se ha ido de la linea negra, y en ese caso,
“lo mejor’ es que des marcha atras.
Podriamos mejorarlo con el sensor de ultrasonidos, incluyendo otro condicional
“Si,..entonoes”, dentro del comando “Por siempre” anterior que pare el mBot antes de
que caiga. Para ello podemos usar una variable “siguelinea” de modo que, si esta a
cero, se parara:
_—_—_—_—_———— es
Pagina 20
Divirtiéndome con mBot
eee
sor GRAPE distance
oe a
entonces
sperar GE) segundos
oe
show face QIEEED x: @ y: characters HY
Breet 0.2 erty
Divirtiéndome con mBot
ir remote EMM pressed _ entonces
show face GML x: © y: © characters: [EEE
esperar @) segundos
Seemed 8 Y Picci tren tay
ue a
show face QUEM x: O y: © characters
esperar @9 segundos
si ir remote [i pressed entonces
Gey Numero » E40]
BS eet x: Oy: O characters: B)
esperar @ segundos
si. ir remote BJM pressed - entonces
ie Numero * E§ 0)
rear Ces x: O y: O characters
esperar @ segundos
eee:
Pagina 29
Divirtiéndome con mBot
si _ ir remote [3h pressed entonces
uiitig Numero ~ E¥ 0]
show face @itierna x: @ y: @ characters: GN
esperar €) segundos
atc PSS Be cenit
ucts Numero » E§ 0]
EEC x: Oy: O characters
esperar @ seau
3.7. Servomotor
Un servomotor se puede considerar como un tipo especial de motor de continua que
se caracteriza por tener la capacidad de girar un angulo determinado dentro de un
intervalo de operacién.
Micro Servo 8g (servomotor)
El servomotor de la casa Makeblock necesita de un adaptador RJ25, como puede
verse en el montaje de la siguiente imagen. Todo adaptador RJ25 dispone de 2
"Bancos" o "Slots" 0 conectores, para poder conectar en el mismo médulo un sensor
de temperatura y un servo, por ejemplo. El adaptador necesita de un puerto y puede
Pagina 30
Divirtiéndome con mBot Divirtiéndome con mBot
conectarse a cualquiera de los puertos: 1, 2, 3 0 4, ya que sus colores ID son negro,
amarillo y azul. En nuestro caso, lo hemos conectado al puerto 1
Un script para mover el servo en 5 diferentes posiciones angulares (0, 45, 90, 135 y
180) seria el siguiente: Se puede elegir el “Banco1” (un banco es un slot o un
conector) porque no tenemos el adaptador conectado a mas de un componente.
esperar @ segund
cambiar EIPISESA por €B
set serve QMERIY CAME ancle angulo
at @ segundo
eee novo a5)
foar EXENES 2
Fi
[areca aap A Due TVA Sf
A mayores, en nuestro ejemplo, el servo se ha unido al sensor de ultrasonidos, de
modo que, consiga moverlo en diferentes posiciones angulares del servo:
Pagina 31
Divirtiéndome con mBot
8. Mini Gripper
Podemos implementar y programar una garra robotica en el mBot.
‘Se denomina Mini Gripper y tiene incorporado un servomotor. Por lo tanto, necesita de
un adaptador RJ25 que lo conecte a la placa del mBot.
Mini Gripped 0 garra robética para mBot
Su programacién es muy sencilla en el entorno mBlock ya que sélo debemos usar el
comando “Fijar servo".
Por ejemplo, para abrir la garra fijaremos el angulo a 0° y para cerrarla, le indiceremos
que lo gire a 90°. Los angulos posibles del servo varian entre 0 y 180°
Divirtiéndome con mBot
Se
fjar servo Boy ey
Se abre la garra
4
gee veto: fesncot Emo)
Se cierrala garra
4
prac) Eilon 90°)
En este ultimo montaje hay que tener cuidado con el sensor de ultrasonidos. Su
deteccién no es lineal; es mas bien cénica. Por esta razon, hay que hacer pruebas
para situar la garra fuera del cono de deteccién del sensor de ultrasonidos para que no
la detecte y detecte a otro objeto que se site en el frontal del mBot.
ee
Pagina 34
EEE SUMMERS
Divirtiéndome con mBot Divirtiéndome con mBot
3.9. Mini brazo articulado
EI mini brazo robstico articulado esté formado por dos microservos 9g que nos
permiten rotar la estructura 180 grados, tanto en vertical como en horizontal. Esta
pensado para ser usado con el mBot, el Starter Kit, el mBot Ranger o cualquier otro
proyecto sobre una placa Arduino, pudiendo combinarse con el médulo Mini Garra del
punto anterior o incluso con un sensor de ultrasonidos.
Un ejemplo para su programacién con mBlock podria ser el siguiente: Notar que en el
ejemplo, el servo de la garra esta conectado al Bancot del adaptador que se asocia al
puerto 3 y los otros dos servos cubren ambos Bancos del adaptador conectado al
puerto 4 de la placa mBot.
En el ejemplo, creo dos bloques. Uno para el movimiento de la garra, y que defino con
el bloque “Garra”, y otro para las condiciones iniciales de comienzo en los otros dos
‘Mini brazo ertioulado: servos que controlan el mini brazo giratorio, y que denoto por “Condicionesiniciales”:
Podemos programar los dos servos del mini brazo articulado de forma sencilla con
Scratch o con el IDE de Arduino. Con mBlock cada servo utiliza un “Banco” del médulo
Adaptador RJ25.
curl
rae
Pete ata Puertos[Sencoi EERO) PAbrelagara
esperar @ segundo
perar & segundo
Sie incluimos la mini garra robética, lo que conseguimos es el montaje de la siguiente
imagen. Simplemente, estamos afiadiendo un servo mas, por lo que necesitamos
echar mano de otro Adaptador R25:
og
Pe caccut encore!
fiar servo GEER CESS inquic €EE9
evo GME GXIEEY snaulo ly
ors
Ce eT
Pagina 36
ES
Divirtiéndome con mBot
EEE
Finalmente, sdlo resta hacer el programa en si. El mio es muy sencillo y solo muestra
algunos movimientos de ambos servos del puerto 4, En cada giro programado, se abre
y cierra la garra:
Bl eieoaas
Soe ee
See pes
Deme reros Lean ERO) > arrarecta
esperar @ seaundos
Cea
enon 45")
ye Girala garra 90",
Ty Puertos “J Banco2")
Be eee
fijar servo CY CXiesie
Pagina 37
Divirtiéndome con mBot
ES
3.10. Sensor de sonido
El sensor de sonido esta destinado a detectar la intensidad de sonido de su entorno.
Podemos utilizarlo para realizar proyectos que requieran que interactuemos con la voz.
El sensor dispone de un amplificador LM386 e incorpora un potenciémetro de ajuste
de sensibilidad, proporcionndonos valores analégicos entre 0 y 1023.
Sensor de sonido.
Este sensor también podemos programarlo con el software mBlock, conectando el
sensor de sonido a los puertos 3 0 4, que son los habilitados para este sensor (ID
negro del sensor).
‘Supongamos que quiero simular el sonido con la vibracién de una onda y aprovecharla
para hacer sonar las notas musicales DO, RE y Ml. En el siguiente escenario se
muestra la onda sinusoidal perfecta y, sin ruido. En él, el sensor de sonido marca un
valor en la variable Nive!Sonido de 136 y el objeto se encuentra en el disfraz “ondas1”
Si el nivel de sonido es menor que 140, debemos ver la onda’ y sonara la nota DO. Si
el nivel de sonido enta entre 140 y 299, debemos ver la onda2 y sonard la nota RE y,
finalmente, siel sonido supera 299, veremos el disfraz de ondas3 y sonard la nota MI.
Nene EET
Pagina 38
Divirtiéndome con mBot
Ee ei
Pgeitd
far NESS 2 Sensor de sonido GREED
5 tors) entonces
TEL ie ya}
tocar nota Gi durante 9 pulsos
NivelSonid
EOea era
tocar nota G9 durante @B pulsos
si NivelSonido > EEE)
cambiar disfraz a EITEEEIRA
tocar nota @9 durante @B pulsos
3.11, Potenciémetro
El potenciémetro lineal de Makeblock es, seguin nos informa la casa, de 50KQ. Es de
270 grados, siendo el minimo valor hacia la izquierda y el maximo valor al tope de la
derecha. Su color de ID negro nos indica que sélo podré conectarse a los puertos 3 y 4
de la placa mCore y a los puertos 7 y 8 del shield de arduino.
Pagina 39
IN OEE IPE
Divirtiéndome con mBot
ES
Médula Potenciémetro
Al igual que en otros médulos, sino queremos usar el shield de arduino y pretendemos.
conectarlo a la placa Arduino Uno, disponemos de 3 terminales: GND, VCC y AO;
siendo esta ultima una de las salidas analogicas de la placa Arduino Uno.
Un ejemplo que nos ayudara a programarlo en arduino lo encontramos en su libreria,
en el archivo PotentiometerTest. Simplemente, debemos modificar el nombre de la
placa que usamos y el puerto en el que conectamos el potenciémetro.
También podemos programarlo con mBlock. En el siguiente ejemplo utilizo el valor
numérico que me proporciona el potenciémetro para modificar el color de los dos led
RGB del mBot. La siguiente imagen muestra el escenario de! programa con el valor
maximo del potenciémetro (girado 270 grados hacia la derecha), que resulta ser de
975.
fm patenccmeuoweoT me
Como puede verse en la siguiente imagen, dispongo de 5 disfraces para recorrer los
975 puntos numéricos del potenciémetro. He decidido hacer intervalos “simétricos” de
médulo 195 (975:5=195) y, a cada intervalo asociarle un color de LED RGB
correspondiente con el color del disfraz:
ee nn aaa
Pagina 40
Divirtiéndome con mBot Divirtiéndome con mBot
i
(im) _potenciémetroMBOT pe @ | ovens [a
Disfraz nuevo; Secor ic
¢/aa ee
: Teg rctencomero” Bale
: sa be Ph -atrent-seescef
Wily 9 eae Tene x Amato
Amanila cambiar disfraz a EXPIRE
soact76
[195 ee 209
PM ec anorco PEP osoe SOY 2s Ree ORL 2s)
a eg
Afy\ i
4
ied CEETEEED
eee o> ~]
X: 240 Y: -30
Nuovo objeto: & /