También podría gustarte
- Spet-Rs-Mpe-007 Procedimiento para Ups PDFDocumento41 páginasSpet-Rs-Mpe-007 Procedimiento para Ups PDFVelázquez MirandaAún no hay calificaciones
- Manual Instruccion de Trabajo PDFDocumento195 páginasManual Instruccion de Trabajo PDFGabriel VillarrealAún no hay calificaciones
- MTL2Documento18 páginasMTL2Velázquez MirandaAún no hay calificaciones
- Mantenimiento de Banco de Baterias y Cargado PDFDocumento36 páginasMantenimiento de Banco de Baterias y Cargado PDFFernando Gutierrez ZelayaAún no hay calificaciones
- Mantenimiento de Banco de Baterias y Cargado PDFDocumento36 páginasMantenimiento de Banco de Baterias y Cargado PDFFernando Gutierrez ZelayaAún no hay calificaciones
- Spet-Rs-Mpe-007 Procedimiento para Ups PDFDocumento41 páginasSpet-Rs-Mpe-007 Procedimiento para Ups PDFVelázquez MirandaAún no hay calificaciones
- Anexo Actividades de MantenimientoDocumento27 páginasAnexo Actividades de MantenimientoJason PilcaAún no hay calificaciones
- Caracteristicas Tecnicas Cargador y Banco de BateriasDocumento16 páginasCaracteristicas Tecnicas Cargador y Banco de BateriasMax Tajima MatsuharaAún no hay calificaciones
- Presentacion-Terminator II TMCX Cable Glands - ESP 2013 PDFDocumento32 páginasPresentacion-Terminator II TMCX Cable Glands - ESP 2013 PDFVelázquez MirandaAún no hay calificaciones
- Josedejesus 1 1Documento1 páginaJosedejesus 1 1Velázquez MirandaAún no hay calificaciones
- 96.cable Exterior Armado Multitubo SM Semiseco 48 FibrasDocumento1 página96.cable Exterior Armado Multitubo SM Semiseco 48 FibrasVelázquez MirandaAún no hay calificaciones
- Unidad 5 de Diseño Mecanico ImprimirDocumento6 páginasUnidad 5 de Diseño Mecanico ImprimirVelázquez MirandaAún no hay calificaciones
- Williams ManufacturaDocumento14 páginasWilliams ManufacturaVelázquez MirandaAún no hay calificaciones
- Torno ConvencionalDocumento14 páginasTorno ConvencionalVelázquez MirandaAún no hay calificaciones
- Unidas 5 de Instrumentacion Imprimir PDFDocumento6 páginasUnidas 5 de Instrumentacion Imprimir PDFVelázquez MirandaAún no hay calificaciones
- Unidad 4 Vibraciones MecanicaDocumento11 páginasUnidad 4 Vibraciones MecanicaVelázquez MirandaAún no hay calificaciones
- MatricesDocumento7 páginasMatricesVelázquez MirandaAún no hay calificaciones
- Capitulo Ii Limites I PDFDocumento23 páginasCapitulo Ii Limites I PDFJosue Misael Resendiz GarciaAún no hay calificaciones
- Manual Calculo IntegralDocumento45 páginasManual Calculo IntegralVelázquez Miranda100% (1)
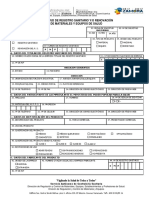
- 1 Formulario Solicitud de Registro Sanitario Yo Renovacin de Mat y Equipos de SaludDocumento4 páginas1 Formulario Solicitud de Registro Sanitario Yo Renovacin de Mat y Equipos de SaludJose Daniel Ponce TorresAún no hay calificaciones
- Álgebra LinealDocumento11 páginasÁlgebra LinealElisa SarmientoAún no hay calificaciones
- Manual PspiceDocumento98 páginasManual Pspicequienviva100% (1)
- 310519Documento112 páginas310519Gtc Diaz CarlosAún no hay calificaciones
- MAnual Del OMICRON CMC356 PDFDocumento188 páginasMAnual Del OMICRON CMC356 PDFArmando Estrada Mendez100% (1)
- Percentiles RangoPercentilDocumento16 páginasPercentiles RangoPercentilGladysBettyAún no hay calificaciones
- Algoritmo Llamada TelefonicaDocumento5 páginasAlgoritmo Llamada TelefonicaAndres LopezAún no hay calificaciones
- Saber Electrónica #280 Edición ArgentinaDocumento84 páginasSaber Electrónica #280 Edición ArgentinaAlbert Eistein100% (1)
- Unmsm 04 Informe Estado Del ArteDocumento3 páginasUnmsm 04 Informe Estado Del ArtebusterleoAún no hay calificaciones
- ATV312 - Control y Supervisión Via Modbus RS485 - Rev1Documento8 páginasATV312 - Control y Supervisión Via Modbus RS485 - Rev1Mauricio Carrasco Lara100% (2)
- HMV - Métodos de Investigación Cuantitativa Con SPSSDocumento17 páginasHMV - Métodos de Investigación Cuantitativa Con SPSSHoracio Miranda Vargas100% (1)
- Potencias Pedro de ValdiviaDocumento14 páginasPotencias Pedro de ValdiviaCarolina Miranda100% (1)
- Pu006 - Sumario & EditorialDocumento2 páginasPu006 - Sumario & EditorialCrist MaridueñaAún no hay calificaciones
- Dependencias FuncionalesDocumento5 páginasDependencias FuncionalesvictorzeroAún no hay calificaciones
- Migrando Nuestra Empresa A Windows Server 2008 R2!26!10 13Documento28 páginasMigrando Nuestra Empresa A Windows Server 2008 R2!26!10 13Alfonso La Rosa SandónAún no hay calificaciones
- Lab Karina PracticasDocumento34 páginasLab Karina PracticasDaniel Cortés Mora100% (1)
- Unidad 1 Algoritmo y ProgramasDocumento6 páginasUnidad 1 Algoritmo y Programassilvana mayorcaAún no hay calificaciones
- Age of Empires TrucosDocumento3 páginasAge of Empires TrucosRicardo SosaAún no hay calificaciones
- DLT CadDocumento7 páginasDLT CadJordi Kevin Ayala LauraAún no hay calificaciones
- Cuestionario 01 Sesion 02Documento5 páginasCuestionario 01 Sesion 02Melanio Mondragòn Carrero81% (42)
- Cuestionario de Métodos NuméricosDocumento7 páginasCuestionario de Métodos NuméricosBlady Còrdova67% (3)
- Informe de Laboratorio de Método de NodosDocumento5 páginasInforme de Laboratorio de Método de NodosOnce AlcilAún no hay calificaciones
- Manual VSAMDocumento36 páginasManual VSAMMary Dos Santos100% (1)
- Factorizacion de Trinomios Del Tipo x2Documento5 páginasFactorizacion de Trinomios Del Tipo x2arivero63Aún no hay calificaciones
- Problemas de Programacion LinealDocumento2 páginasProblemas de Programacion Linealjorarm0% (1)
- Def de Gerencia de La Seguridad Res Spa 1111Documento30 páginasDef de Gerencia de La Seguridad Res Spa 1111alexander_osorio_1Aún no hay calificaciones
- Datacenter - Una Mirada Por DentroDocumento192 páginasDatacenter - Una Mirada Por DentroLUISAún no hay calificaciones
- Practica Calificada Canal 2do AporteDocumento7 páginasPractica Calificada Canal 2do AporteCarlos Raul Canal MartinezAún no hay calificaciones
- 6.propuesta para La Creacion de Un Sistema de Facturación Electronica para Las Pymes Del Mercado Mayorista Conzac PDFDocumento47 páginas6.propuesta para La Creacion de Un Sistema de Facturación Electronica para Las Pymes Del Mercado Mayorista Conzac PDFCarbajal HolaAún no hay calificaciones
- 3 Guia Practica de Microsfot Excel 2007 Completa 2014 Nivel Avanzado PracticasDocumento100 páginas3 Guia Practica de Microsfot Excel 2007 Completa 2014 Nivel Avanzado Practicasedidson fuentesAún no hay calificaciones