También podría gustarte
- Pre SupuestoDocumento6 páginasPre SupuestoAngel Mercado VegaAún no hay calificaciones
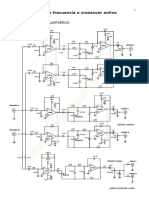
- Crossover ActivoDocumento7 páginasCrossover ActivoAngel Mercado VegaAún no hay calificaciones
- Tesla MotorsDocumento8 páginasTesla MotorsAngel Mercado VegaAún no hay calificaciones
- Win 10Documento5 páginasWin 10grangrecaAún no hay calificaciones
- Ondas Viajeras ACv2Documento29 páginasOndas Viajeras ACv2Ivan Alejandro Maya IglesiasAún no hay calificaciones
- KetoprofenoDocumento1 páginaKetoprofenoAngel Mercado VegaAún no hay calificaciones
- Transmisor de FM (Modificacion A Audio Digital)Documento7 páginasTransmisor de FM (Modificacion A Audio Digital)Kriztian OnofreAún no hay calificaciones
- MONOGRAFIASDocumento12 páginasMONOGRAFIASAngel Mercado VegaAún no hay calificaciones
- Lista de PreciosDocumento7 páginasLista de PreciosAngel Mercado Vega100% (1)
- Ale MuñozDocumento19 páginasAle MuñozAngel Mercado VegaAún no hay calificaciones
- Proceso de Doblado y EmbutidoDocumento24 páginasProceso de Doblado y EmbutidoRoberto Molina RoldánAún no hay calificaciones
- Atencion ProgresivaDocumento11 páginasAtencion ProgresivaRicardo Sanchez gomezAún no hay calificaciones
- Plataforma de La PlaneacionDocumento2 páginasPlataforma de La PlaneacionMildre Sarao CoronadoAún no hay calificaciones
- LIMADocumento2 páginasLIMAGerman Fernandez RojasAún no hay calificaciones
- SBG 1 de 1Documento336 páginasSBG 1 de 1Andrea CerezoAún no hay calificaciones
- Variacion en El Precio de Un BienDocumento0 páginasVariacion en El Precio de Un BienEfrain Lara MoranAún no hay calificaciones
- Formulacion y Evaluacion de ProyectosDocumento9 páginasFormulacion y Evaluacion de ProyectosJose Luis BoalñosAún no hay calificaciones
- Entrega 2 Semana 5Documento6 páginasEntrega 2 Semana 5Keops MontealegreAún no hay calificaciones
- Plan de Estudios - 52Documento116 páginasPlan de Estudios - 52Christopher VasquezAún no hay calificaciones
- CIRCULAR INFORMATIVA No, 2 PRACTICA PEDAGOGICADocumento3 páginasCIRCULAR INFORMATIVA No, 2 PRACTICA PEDAGOGICAfernandoAún no hay calificaciones
- Capitulo IV Proyecto Mini Central AzucareroDocumento16 páginasCapitulo IV Proyecto Mini Central Azucareromarlene naimAún no hay calificaciones
- Guía - Fase 2 - Desarrollar El Trabajo Uno - Determinación Problema de CasoDocumento10 páginasGuía - Fase 2 - Desarrollar El Trabajo Uno - Determinación Problema de CasohectorAún no hay calificaciones
- Conceptos de HidráulicaDocumento156 páginasConceptos de HidráulicaJair SierraAún no hay calificaciones
- Dd031-Reclutamiento, Seleccion y PromocionDocumento8 páginasDd031-Reclutamiento, Seleccion y PromocionJoseIgnacioUrdanigoAún no hay calificaciones
- m15 Caso 1 SaicaDocumento9 páginasm15 Caso 1 SaicaAdriana Naranjo MAún no hay calificaciones
- Nom Z-57Documento8 páginasNom Z-57isai0% (1)
- Inmuebles EdomexDocumento188 páginasInmuebles EdomexIvánAún no hay calificaciones
- Marco TeoricoDocumento3 páginasMarco TeoricoYam Espino RoqueAún no hay calificaciones
- Presentación Galaxy SegurosDocumento20 páginasPresentación Galaxy SegurosdisdrogasAún no hay calificaciones
- Lixiviados Doña JuanaDocumento9 páginasLixiviados Doña JuanaNicolas Sierra TristanchoAún no hay calificaciones
- TAREA de Intercambiadores de Calor ChristopherDocumento11 páginasTAREA de Intercambiadores de Calor ChristopherDANIEL MARTINEZ RODRIGUEZAún no hay calificaciones
- Ingresos Brutos 2021 Tii 1Documento47 páginasIngresos Brutos 2021 Tii 1Flor BianconiAún no hay calificaciones
- Taller Radiaciones No Ionizantes Act 8 VirtualDocumento4 páginasTaller Radiaciones No Ionizantes Act 8 VirtualLuisa Maria LOPEZ MEJIAAún no hay calificaciones
- Prueba Definitiva Tecnologias de La InformacionDocumento9 páginasPrueba Definitiva Tecnologias de La InformacionPatricio Avila100% (1)
- Evaluación de La Gestión de Los Recursos Hídricos de Las CuencasDocumento12 páginasEvaluación de La Gestión de Los Recursos Hídricos de Las CuencasWilfredo Quezada CuevaAún no hay calificaciones
- Proporcionalidad Numerica 1Documento2 páginasProporcionalidad Numerica 1maria jose sanchez valenzuelaAún no hay calificaciones
- Informe Ensamble y Desensamble de Pantalla LCDDocumento10 páginasInforme Ensamble y Desensamble de Pantalla LCDMiguel Andres Verano DiazAún no hay calificaciones
- Re-Sp-Hseq-005 Listado Maestro de Documentos Del SG-SSTDocumento12 páginasRe-Sp-Hseq-005 Listado Maestro de Documentos Del SG-SSTJulieth Paola MancipeAún no hay calificaciones
- IntegraciónDocumento7 páginasIntegraciónBelen AlvarezAún no hay calificaciones
- Definición de Circuito CerradoDocumento1 páginaDefinición de Circuito CerradoJose D RojasAún no hay calificaciones