También podría gustarte
- Antecedentes Históricos de La MecánicaDocumento4 páginasAntecedentes Históricos de La Mecánicasandra gomez0% (1)
- Esquema Eléctrico - Versión 2, ComplementarioDocumento9 páginasEsquema Eléctrico - Versión 2, ComplementarioLeonel Rojas100% (1)
- Intereses Dobre Saldos DeudoresDocumento3 páginasIntereses Dobre Saldos DeudoresKlever Xavier CajamarcaAún no hay calificaciones
- Problemas UnidadesDocumento2 páginasProblemas UnidadesEdwin Farfán100% (1)
- Sintonizacion PID Control TemperaturaDocumento18 páginasSintonizacion PID Control TemperaturaBryan PilaAún no hay calificaciones
- La Descentralizacion en El PeruDocumento58 páginasLa Descentralizacion en El PeruHugos Vasquez100% (1)
- Ejercicios - Confiabilidad PDFDocumento4 páginasEjercicios - Confiabilidad PDFLuis Jahuira Salas0% (1)
- Consult ADocumento14 páginasConsult ABryan PilaAún no hay calificaciones
- Trabajo Preparatorio OsciladorDocumento5 páginasTrabajo Preparatorio OsciladorBryan PilaAún no hay calificaciones
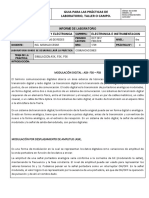
- Informe Simulacion Ask FSK PSKDocumento8 páginasInforme Simulacion Ask FSK PSKBryan PilaAún no hay calificaciones
- Prepo PWM PPM PamDocumento4 páginasPrepo PWM PPM PamBryan PilaAún no hay calificaciones
- Informe CABLEDocumento6 páginasInforme CABLEBryan PilaAún no hay calificaciones
- Oscilador Pila J.zambranoDocumento9 páginasOscilador Pila J.zambranoBryan PilaAún no hay calificaciones
- EdMe Strohmaier - Al BiruniDocumento8 páginasEdMe Strohmaier - Al BiruniAngel Chavez EslavaAún no hay calificaciones
- Fcab PDFDocumento3 páginasFcab PDFJ Aníbal HenríquezAún no hay calificaciones
- Cuadernillo Ejercicios Complementarios Primer BimestreDocumento30 páginasCuadernillo Ejercicios Complementarios Primer BimestreCarlos OrtizAún no hay calificaciones
- Js4 6mt ComfortDocumento3 páginasJs4 6mt Comfortmiguel olivaAún no hay calificaciones
- Acfrogb Crldtiaeff8spvpeiema4 CsDocumento9 páginasAcfrogb Crldtiaeff8spvpeiema4 CsJairo Antonio Becerra CastroAún no hay calificaciones
- Caso Negocios Eléctricos PDFDocumento9 páginasCaso Negocios Eléctricos PDFCRISTIAN FABIAN PACHERRES SANCHEZAún no hay calificaciones
- BOK - CSSGB - Six Sigma Green Belt CertificadoDocumento10 páginasBOK - CSSGB - Six Sigma Green Belt CertificadoPedro Martin PerezAún no hay calificaciones
- UcraniaDocumento29 páginasUcraniayury ortegaAún no hay calificaciones
- Servicios Asociacion Suyay America Latina - Suyay AlDocumento27 páginasServicios Asociacion Suyay America Latina - Suyay Alsem carlosAún no hay calificaciones
- Quimica Fisica, Fisica Atomica y Fisica MolecularDocumento21 páginasQuimica Fisica, Fisica Atomica y Fisica Molecularmanuel vegaAún no hay calificaciones
- Ter Ter 1 Energia CFTDocumento2 páginasTer Ter 1 Energia CFTfdAún no hay calificaciones
- Presupuesto de Obra - I.E. #523 - Centro Poblado Los AngelesDocumento12 páginasPresupuesto de Obra - I.E. #523 - Centro Poblado Los Angelesjose luisAún no hay calificaciones
- Estructura y Sintaxis de Los LenguajesDocumento15 páginasEstructura y Sintaxis de Los LenguajesAndres E. Torrealba T.Aún no hay calificaciones
- Catalogo Frasat Junio 2020Documento4 páginasCatalogo Frasat Junio 2020Richard HuamaniAún no hay calificaciones
- Orga Ultimo ReporteDocumento3 páginasOrga Ultimo ReporteosmairynAún no hay calificaciones
- La Observación Arquitectónica de Valparaíso Su Periferia Efímera 2013 PuentesDocumento316 páginasLa Observación Arquitectónica de Valparaíso Su Periferia Efímera 2013 PuentesHector MillanAún no hay calificaciones
- Adrenalina (Epinefrina) en El Cartucho Anestesico Dental.5555Documento9 páginasAdrenalina (Epinefrina) en El Cartucho Anestesico Dental.5555genesis johana maldonado cabanaAún no hay calificaciones
- Historia Shampoo SabilaDocumento7 páginasHistoria Shampoo SabilaJust MusicAún no hay calificaciones
- 16 Proc - Hse - 016 Procedimiento de Autorización de VisitasDocumento11 páginas16 Proc - Hse - 016 Procedimiento de Autorización de VisitasAzumy Lorena Lopez N. AzumyAún no hay calificaciones
- Diario116 Entero WebDocumento47 páginasDiario116 Entero WebjpdiaznlAún no hay calificaciones
- Hongos y LevadurasDocumento14 páginasHongos y Levadurasfiachino33% (3)
- Caso Practico ControlDocumento3 páginasCaso Practico ControlKanjiAún no hay calificaciones
- Informe Analisis de La Empresa Actividad Evidencia3Documento5 páginasInforme Analisis de La Empresa Actividad Evidencia3J Alexander GalindoAún no hay calificaciones
- PD Electrostática 2021Documento2 páginasPD Electrostática 2021JHOEL LLANOS ALVARADOAún no hay calificaciones