También podría gustarte
- Hoja de Vida Ing - Ronny TituanaDocumento12 páginasHoja de Vida Ing - Ronny TituanaRonny TituanaAún no hay calificaciones
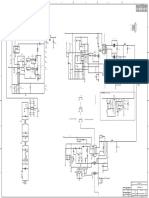
- LG TV Lips42 Innotek HisenseDocumento2 páginasLG TV Lips42 Innotek HisenseRonny TituanaAún no hay calificaciones
- Tesis MyoDocumento22 páginasTesis MyoRonny TituanaAún no hay calificaciones
- D 106304 PDFDocumento73 páginasD 106304 PDFRonny TituanaAún no hay calificaciones
- Práctica Nº2 - Altura MetacéntricaDocumento7 páginasPráctica Nº2 - Altura MetacéntricaRonny TituanaAún no hay calificaciones
- Introduccion A La ConveccionDocumento37 páginasIntroduccion A La ConveccionRonny TituanaAún no hay calificaciones
- Practica 1 OleoneumaticaDocumento5 páginasPractica 1 OleoneumaticaRonny TituanaAún no hay calificaciones
- Exámen Diseño ElectrónicoDocumento5 páginasExámen Diseño ElectrónicoRonny TituanaAún no hay calificaciones
- Configuración Del Módulo de Comunicación SerieDocumento19 páginasConfiguración Del Módulo de Comunicación SerieRonny TituanaAún no hay calificaciones
- Modelado Del ActuadorDocumento3 páginasModelado Del ActuadorRonny TituanaAún no hay calificaciones
- Tejido Oseo HistologiaDocumento18 páginasTejido Oseo HistologiaRodolfo Diaz100% (3)
- FODA Caso SABDocumento2 páginasFODA Caso SABSianya SofíaAún no hay calificaciones
- Taz PFC 2015 129Documento105 páginasTaz PFC 2015 129Navarro Viera Shary JazmínAún no hay calificaciones
- Como Poner Una Tienda de Videojuegos - Guía de NegocioDocumento4 páginasComo Poner Una Tienda de Videojuegos - Guía de NegocioAlbertoAún no hay calificaciones
- La Última MisiónDocumento1 páginaLa Última MisiónhatsuneAún no hay calificaciones
- Tema 5.1 FRV - RebosaderosDocumento39 páginasTema 5.1 FRV - RebosaderosMaría Paula Alejandra Navarro RodríguezAún no hay calificaciones
- ¿Cómo Se Extrae El Oro?Documento5 páginas¿Cómo Se Extrae El Oro?Katya Marcela Herrera MuñozAún no hay calificaciones
- El Espiritismo Religion o SectaDocumento5 páginasEl Espiritismo Religion o Sectawilliam nieves100% (1)
- Amplian Vigencia de Medidas Extraordinarias Relacionadas Al Resolucion No 109 2019 Cdosiptel 1802011 1Documento3 páginasAmplian Vigencia de Medidas Extraordinarias Relacionadas Al Resolucion No 109 2019 Cdosiptel 1802011 1Carlos AvilaAún no hay calificaciones
- Aporte XincaDocumento4 páginasAporte XincaFlakiTa de Martínez17% (6)
- Culto de ParejasDocumento4 páginasCulto de ParejasAndresAlvarezAún no hay calificaciones
- 1.1 Equipo 3 InvestigacionDocumento32 páginas1.1 Equipo 3 InvestigacionSergio Ariel Santos ValenciaAún no hay calificaciones
- Estructura MisaDocumento3 páginasEstructura MisaJM CuevasAún no hay calificaciones
- Fauna SueloDocumento84 páginasFauna SueloOscar David Roldan DiazAún no hay calificaciones
- VUMI Plans Comparison 2017 2018 SPADocumento7 páginasVUMI Plans Comparison 2017 2018 SPAGabriela De LimaAún no hay calificaciones
- El Ciudadano 436-WebDocumento11 páginasEl Ciudadano 436-WebEL CIUDADANOAún no hay calificaciones
- El Tratamiento de La Igualdad de Género en Centros de Ei y Eprimaria en CeutaDocumento475 páginasEl Tratamiento de La Igualdad de Género en Centros de Ei y Eprimaria en CeutaJessica MPAún no hay calificaciones
- ZelioDocumento27 páginasZeliodiego fernando salgado deviaAún no hay calificaciones
- La Institución Educativa: Un Tipo de Organización : Isabel Parés GutiérrezDocumento14 páginasLa Institución Educativa: Un Tipo de Organización : Isabel Parés Gutiérrezjhonny chambi mamaniAún no hay calificaciones
- Generalidades de La MoralDocumento8 páginasGeneralidades de La MoralMagdaAún no hay calificaciones
- FES-Flores de CaliforniaDocumento13 páginasFES-Flores de Californiaolgaelenacamacho100% (3)
- Ejer L6Documento4 páginasEjer L6Juvenal Ticona0% (1)
- Catalogo ZitroDocumento33 páginasCatalogo ZitroJuan carlosAún no hay calificaciones
- Caso Practico 3 Presupuesto PublicoDocumento8 páginasCaso Practico 3 Presupuesto PublicoJUANMI CHIKAún no hay calificaciones
- BaculovirusDocumento112 páginasBaculovirusLeidy MartinezAún no hay calificaciones
- Monografia de La Emision de Obligaciones UNJFSCDocumento19 páginasMonografia de La Emision de Obligaciones UNJFSCMONICAAún no hay calificaciones
- Certificado ParticipacionDocumento2 páginasCertificado ParticipacionDaniela VillegasAún no hay calificaciones
- Kharemm Pasos Matematicas Financieras NEDocumento20 páginasKharemm Pasos Matematicas Financieras NEISISAún no hay calificaciones
- Estructura y Tiempo en La Novela La Tumba Del RelampagoDocumento39 páginasEstructura y Tiempo en La Novela La Tumba Del RelampagoPitufina Rara0% (1)
- Claudia Mugica Zuñiga - A1u9 - DaDocumento5 páginasClaudia Mugica Zuñiga - A1u9 - DaClaudia I. Mugica ZuñigaAún no hay calificaciones