También podría gustarte
- Caso de Estudio Puente DueroDocumento32 páginasCaso de Estudio Puente DueroWanner UlloaAún no hay calificaciones
- Uml DueroDocumento2 páginasUml DueroJuanAún no hay calificaciones
- Facultad de Ingeniería: Mapa Conceptual: Acceso Directo A Memoria (Dma)Documento2 páginasFacultad de Ingeniería: Mapa Conceptual: Acceso Directo A Memoria (Dma)Leonardo MassAún no hay calificaciones
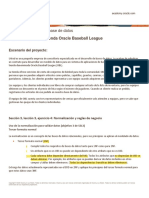
- DFo 2 5 2 Project EspDocumento5 páginasDFo 2 5 2 Project EspKathrym orinaAún no hay calificaciones
- Crear Cluster Con UbuntuDocumento11 páginasCrear Cluster Con UbuntubachasaurusAún no hay calificaciones
- Punto de Venta Con Visual Basic 2010 y MySQLDocumento7 páginasPunto de Venta Con Visual Basic 2010 y MySQLMinisterio De Teatro Varones CcjAún no hay calificaciones
- Tema 5. Manejo de Ficheros en JavaDocumento32 páginasTema 5. Manejo de Ficheros en JavaFrancisco FrutosAún no hay calificaciones
- Explicación Práctica 5 - Lenguajes Formales y AutómatasDocumento30 páginasExplicación Práctica 5 - Lenguajes Formales y AutómatasJorge Rafael OsioAún no hay calificaciones
- S O MandrivaDocumento24 páginasS O MandrivaWalter EduardoAún no hay calificaciones
- Soplete 6 Curso 1Documento8 páginasSoplete 6 Curso 1Manuel SalazarAún no hay calificaciones
- DFo 2 3 2 Project Esp ELT TIAIRDDocumento4 páginasDFo 2 3 2 Project Esp ELT TIAIRDÛppī Û AnguioAún no hay calificaciones
- Informe de La Base de Datos Ferreteria UjcmDocumento32 páginasInforme de La Base de Datos Ferreteria UjcmAlex Yovani ZelaAún no hay calificaciones
- Herramientas CaseDocumento32 páginasHerramientas Casemanuelnavarro2010Aún no hay calificaciones
- Boozox Explicación Visual de Los SQL Join - Unir Tablas Con SQLDocumento27 páginasBoozox Explicación Visual de Los SQL Join - Unir Tablas Con SQLsoniboxAún no hay calificaciones
- Ensayo Sobre Diagrama de ClasesDocumento12 páginasEnsayo Sobre Diagrama de ClasesNelson A. Morbán Torres100% (1)
- Sesion 7 - 3 Diseño - Diagramas de ComponentesDocumento23 páginasSesion 7 - 3 Diseño - Diagramas de ComponentesqAún no hay calificaciones
- DFo 1 4 Practice EspDocumento1 páginaDFo 1 4 Practice EspMerin AlvarezAún no hay calificaciones
- DFo Practica 3 1Documento8 páginasDFo Practica 3 1emeli0% (1)
- DD 8 1 Practice EspDocumento5 páginasDD 8 1 Practice EspMiroslava MelgaresAún no hay calificaciones
- Tarea-No 1Documento2 páginasTarea-No 1prueba67% (3)
- DD 3 4 Practice EspDocumento2 páginasDD 3 4 Practice EspAbel Astacio100% (1)
- Estructura Condicional SimpleDocumento2 páginasEstructura Condicional Simplemoises_Rko0% (1)
- Roles y Permisos ProcesoDocumento8 páginasRoles y Permisos ProcesoCarrillo FernandoAún no hay calificaciones
- 11 - Taller MecánicoDocumento1 página11 - Taller MecánicoCronwell Mairena RojasAún no hay calificaciones
- Piad-311 Ejercicio t003Documento3 páginasPiad-311 Ejercicio t003jua huamanAún no hay calificaciones
- DFo 2 3 Practice EsDocumento2 páginasDFo 2 3 Practice EsKathrym orina100% (1)
- PLSQL 1 Bloques AnónimosDocumento16 páginasPLSQL 1 Bloques AnónimosDanny Dalmata100% (1)
- Manual Administracion de Bases de Datos I - V0810Documento122 páginasManual Administracion de Bases de Datos I - V0810Daniella KyjAún no hay calificaciones
- Toaz - Info Quiz Section3 1 PR - .En - EsDocumento4 páginasToaz - Info Quiz Section3 1 PR - .En - EsJefryMarquezAún no hay calificaciones
- DFo 6 5 EspDocumento24 páginasDFo 6 5 EspAnsony Rolando MedinaAún no hay calificaciones
- Programación de Bases de Datos Con SQL 2-2: Limitación de Filas Seleccionadas Actividades de PrácticaDocumento7 páginasProgramación de Bases de Datos Con SQL 2-2: Limitación de Filas Seleccionadas Actividades de PrácticaCristian Ayme floreAún no hay calificaciones
- SQL - Examen Final v2.0Documento3 páginasSQL - Examen Final v2.0Jhersson CruzAún no hay calificaciones
- Poo - E1 - Simulador AhorrosDocumento40 páginasPoo - E1 - Simulador AhorrosCarlos Silva Rodriguez100% (1)
- DS Lab03Documento8 páginasDS Lab03RF CRAún no hay calificaciones
- La Década de 1940Documento2 páginasLa Década de 1940Adalgisa HerreraAún no hay calificaciones
- PIAD-516 FORMATOALUMNOTRABAJOFINAl.Documento8 páginasPIAD-516 FORMATOALUMNOTRABAJOFINAl.NILOAún no hay calificaciones
- DocumentacionDocumento6 páginasDocumentacionANGELALROJASCAún no hay calificaciones
- Cuestionarios ResueltosDocumento3 páginasCuestionarios ResueltosLuis SalasAún no hay calificaciones
- OracleFlix SQL Project Exercise EspDocumento2 páginasOracleFlix SQL Project Exercise EspJavier FloresAún no hay calificaciones
- Ejercicio Almacen SQLDocumento2 páginasEjercicio Almacen SQLalejoAún no hay calificaciones
- DD 9 4 Practice EspDocumento4 páginasDD 9 4 Practice EspNicol RodriguezAún no hay calificaciones
- DFo 2 5 1 Project EspDocumento4 páginasDFo 2 5 1 Project EspKathrym orinaAún no hay calificaciones
- DP 4Documento16 páginasDP 4Brian ParraAún no hay calificaciones
- AlgoritmoDocumento5 páginasAlgoritmotitisqui100% (18)
- Ejercicios HR 2Documento3 páginasEjercicios HR 2Diego Carrión NeiraAún no hay calificaciones
- Data BindingDocumento8 páginasData BindingKaren Alvarado RiverosAún no hay calificaciones
- DFo 3 3 4 Project EspDocumento1 páginaDFo 3 3 4 Project EspNicol RodriguezAún no hay calificaciones
- DFo 4 2 Project EspDocumento10 páginasDFo 4 2 Project EspKady Gisselle GomézAún no hay calificaciones
- SQL 2Documento8 páginasSQL 2Alex DesarrolladorAún no hay calificaciones
- Procedimientos Almacenados - Control de VentasDocumento14 páginasProcedimientos Almacenados - Control de VentasUriel UrestiAún no hay calificaciones
- 2.4. Bases de Datos II - Lenguaje SQL - Consultas Multitabla JOIN - Actividad 2Documento11 páginas2.4. Bases de Datos II - Lenguaje SQL - Consultas Multitabla JOIN - Actividad 2Diego MontoyaAún no hay calificaciones
- Consultas SQLDocumento12 páginasConsultas SQLJuan PabloAún no hay calificaciones
- Ejercicio de Normalización BDDocumento3 páginasEjercicio de Normalización BDJavier PalenciaAún no hay calificaciones
- Prgtema 02Documento31 páginasPrgtema 02José MarínAún no hay calificaciones
- AlgoritmosDocumento6 páginasAlgoritmosminkiAún no hay calificaciones
- Sistemas DigitalesDocumento22 páginasSistemas DigitalesYosselyn CastroAún no hay calificaciones
- Equipo 1 IA Deteccion de ObstaculosDocumento18 páginasEquipo 1 IA Deteccion de ObstaculosLUCEROAún no hay calificaciones
- Informe AlgoritmiaDocumento17 páginasInforme AlgoritmiaMaria Jose CharryAún no hay calificaciones
- MemoriaDocumento16 páginasMemoriaMaria Arrojo NaveiraAún no hay calificaciones
- Monografía Final FDCDocumento21 páginasMonografía Final FDCSarai Japa ArqueñoAún no hay calificaciones
- Dominio 3 EspañolDocumento41 páginasDominio 3 EspañolelyexAún no hay calificaciones
- 711 JUDITH REBECA BRADLEY SARMIENTO Proyecto2 de Ingenieria Del Sofware Judith Bradley Sarmiento. 229534 640813886Documento26 páginas711 JUDITH REBECA BRADLEY SARMIENTO Proyecto2 de Ingenieria Del Sofware Judith Bradley Sarmiento. 229534 640813886Judith BradleyAún no hay calificaciones
- Manual 22Documento28 páginasManual 22coficab juarezAún no hay calificaciones
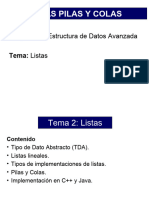
- Listas Pilas Colas1Documento57 páginasListas Pilas Colas1nathaly velasquezAún no hay calificaciones
- Fundamentos de InformáticaDocumento34 páginasFundamentos de InformáticaJorge Fernando Cruz100% (6)
- Practica 12Documento18 páginasPractica 12leocade100% (1)
- Ex de Entrada Ctos 2 2021 IIDocumento1 páginaEx de Entrada Ctos 2 2021 IICanalDTodoUnPoco PCAún no hay calificaciones
- Red de Área de CampusDocumento6 páginasRed de Área de CampusBelkys SosaAún no hay calificaciones
- Parcial 1 Sistemas Embebidos - Santiago Ibarra y Sebastián PuertaDocumento4 páginasParcial 1 Sistemas Embebidos - Santiago Ibarra y Sebastián PuertaALEJANDRO NAVARRETE ROJASAún no hay calificaciones
- Libro Levine Caps 2-4Documento98 páginasLibro Levine Caps 2-4GUILLERMO LEVINE GUTIÉRREZAún no hay calificaciones
- Herramientas de Microsoft OfficeDocumento10 páginasHerramientas de Microsoft Officejuan Esteban perez buitragoAún no hay calificaciones
- Tarea 1 PotenciaDocumento2 páginasTarea 1 PotenciaIsrael CastroAún no hay calificaciones
- 4.6 Aplicación de ContadoresDocumento6 páginas4.6 Aplicación de ContadoresnicolAún no hay calificaciones
- Patrimonio MPDCDocumento294 páginasPatrimonio MPDCJarumi L'aAún no hay calificaciones
- Tipo de Datos Del Valor Devuelto en VBDocumento10 páginasTipo de Datos Del Valor Devuelto en VBMariano PerezAún no hay calificaciones
- Dosier de Competencias PrimeIT EnriqueRocafullDocumento5 páginasDosier de Competencias PrimeIT EnriqueRocafullEnrique RocafullAún no hay calificaciones
- Ejemplos de MacrocomputadorasDocumento4 páginasEjemplos de MacrocomputadorasMarvin OrtizAún no hay calificaciones
- DP 2021 02 U01 T03 Algoritmos y Estructura de Datos (4683)Documento16 páginasDP 2021 02 U01 T03 Algoritmos y Estructura de Datos (4683)Gabriela CallirgosAún no hay calificaciones
- Semana 2Documento4 páginasSemana 2Bruno GayossoAún no hay calificaciones
- Planilla ABADocumento2 páginasPlanilla ABACarlos Oswaldo PerezAún no hay calificaciones
- 2° Practico InformaticaDocumento10 páginas2° Practico InformaticaWilson Lobo Davila ZAún no hay calificaciones
- Maniobra MoviliftDocumento72 páginasManiobra MoviliftMarcos Pérez100% (1)
- Estilo y PatronDocumento56 páginasEstilo y PatronArmando Paredes JaraAún no hay calificaciones
- Anteproyecto - 2020 - Detector de SueñoDocumento21 páginasAnteproyecto - 2020 - Detector de Sueñomoises villero donadoAún no hay calificaciones
- Ordenamiento RadixDocumento14 páginasOrdenamiento Radixbrandon ramirezAún no hay calificaciones
- 8.3.6 Lab - Use NETCONF To Access An IOS XE DeviceDocumento17 páginas8.3.6 Lab - Use NETCONF To Access An IOS XE DevicehernandezpaloAún no hay calificaciones
- Reglas Entrada LocalDocumento12 páginasReglas Entrada Localgerardo andres hurtadoAún no hay calificaciones
- Ejercicios Filtros AvanzadosDocumento135 páginasEjercicios Filtros AvanzadosTatiana SanchezAún no hay calificaciones
- Modern CurriculumDocumento2 páginasModern CurriculumBeatriz Eugenia Duque RestrepoAún no hay calificaciones