También podría gustarte
- Mantenimiento, preparación y manejo de tractores. AGAF0108De EverandMantenimiento, preparación y manejo de tractores. AGAF0108Aún no hay calificaciones
- Taller Tercer CorteDocumento2 páginasTaller Tercer CorteIsaias VillamizarAún no hay calificaciones
- Practica Dirigida #04 - 2011-IDocumento2 páginasPractica Dirigida #04 - 2011-IJhan Rojas Pérez0% (1)
- Máquina Sincrónica (Motor y Generador)Documento2 páginasMáquina Sincrónica (Motor y Generador)andres_arias_silvaAún no hay calificaciones
- Demanda Máx Real de kVA, Ku - KsDocumento15 páginasDemanda Máx Real de kVA, Ku - KsedwinAún no hay calificaciones
- Transformador OSAKA - IDAXDocumento2 páginasTransformador OSAKA - IDAXChristianAún no hay calificaciones
- Agc - Control Automatico de La GeneracionDocumento61 páginasAgc - Control Automatico de La GeneracionCristhian StalinAún no hay calificaciones
- Métodos para Analizar Los ArmónicosDocumento10 páginasMétodos para Analizar Los ArmónicosCristian BolañosAún no hay calificaciones
- Captiulo5 PDFDocumento52 páginasCaptiulo5 PDFMarcos Torres ReyesAún no hay calificaciones
- Prueba de Polaridad de Los TrasformadoresDocumento3 páginasPrueba de Polaridad de Los TrasformadoresFausto QuirogaAún no hay calificaciones
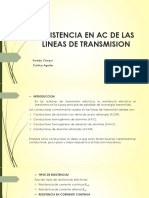
- Resistencia en Ac de Las Lineas de TransmisionDocumento14 páginasResistencia en Ac de Las Lineas de TransmisionCristinaAguilar100% (1)
- Manual CM4000TDocumento250 páginasManual CM4000Tadicto001Aún no hay calificaciones
- Generación de Armónicos y Cálculo de Porcentajes de DistorsiónDocumento6 páginasGeneración de Armónicos y Cálculo de Porcentajes de DistorsiónDaniel Alexander M-tAún no hay calificaciones
- Informe Basico de Maquinas Electricas IDocumento9 páginasInforme Basico de Maquinas Electricas ICristobal Nicolas Pelliza GonzalezAún no hay calificaciones
- G12 - PR 074-2004 05 Julio 20Documento29 páginasG12 - PR 074-2004 05 Julio 20David MendozaAún no hay calificaciones
- 12 PulsosDocumento2 páginas12 PulsosOmarAún no hay calificaciones
- Protocolo de Pruebas de Los Generadores S Ncronos 1 PDFDocumento64 páginasProtocolo de Pruebas de Los Generadores S Ncronos 1 PDFJunior YanaAún no hay calificaciones
- Motor SincronoDocumento6 páginasMotor SincronoPancho Coronel100% (1)
- Componentes de SecuenciaDocumento5 páginasComponentes de SecuenciaWilly OliverAún no hay calificaciones
- Maquina Sincrona en Su Estado SubtransitorioDocumento6 páginasMaquina Sincrona en Su Estado SubtransitorioAlbert Huarhua TupayachiAún no hay calificaciones
- Implementación de Sistemas de Potencia en ATPDrawDocumento18 páginasImplementación de Sistemas de Potencia en ATPDrawManuel PulidoAún no hay calificaciones
- Universidad Jóse Carlos Mariategui: Facultad de Ingeniería Escuela Profesional Debingeniería Mecánica ElectricaDocumento12 páginasUniversidad Jóse Carlos Mariategui: Facultad de Ingeniería Escuela Profesional Debingeniería Mecánica ElectricaDaniel Huacca MamaniAún no hay calificaciones
- Manual de Instalación, Funcionamiento y Mantenimiento en Transformadores en AceiteDocumento36 páginasManual de Instalación, Funcionamiento y Mantenimiento en Transformadores en AceiteingpaulhAún no hay calificaciones
- Expo Reserva RodanteDocumento50 páginasExpo Reserva RodanteEDISSON ANDRES VILLA AVILAAún no hay calificaciones
- Control Escalar en Motores de Induccion MonofasicosDocumento12 páginasControl Escalar en Motores de Induccion MonofasicosAldair FLAún no hay calificaciones
- Preguntas 2 BrigidoDocumento5 páginasPreguntas 2 BrigidoStarlyn RosarioAún no hay calificaciones
- Proyecto de Lineas de Transmision 2-2012 BetoDocumento14 páginasProyecto de Lineas de Transmision 2-2012 BetoSamuel Astete ChoquevillcaAún no hay calificaciones
- Aplicacion de Reles Con Sincrofasores en Sistemas Electricos InterconectadosDocumento82 páginasAplicacion de Reles Con Sincrofasores en Sistemas Electricos InterconectadosKenneth Yanulaque100% (1)
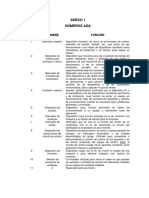
- Anexo Números ASADocumento12 páginasAnexo Números ASAJairo Ch L100% (2)
- Norma Dge Contraste Medicion Energia - Nov05Documento14 páginasNorma Dge Contraste Medicion Energia - Nov05abadnundAún no hay calificaciones
- Ejemplo de Cortocircuito ANSIDocumento26 páginasEjemplo de Cortocircuito ANSIjaliesispAún no hay calificaciones
- Fenómeno Transitorio en Los Generadores SincrónicosDocumento12 páginasFenómeno Transitorio en Los Generadores SincrónicosChili BermudezAún no hay calificaciones
- Componentes simétricas: descomposición de sistemas trifásicosDocumento29 páginasComponentes simétricas: descomposición de sistemas trifásicosBet PaganiAún no hay calificaciones
- Preparatorio 2 Alto OltajeDocumento6 páginasPreparatorio 2 Alto OltajeBryan EstrellaAún no hay calificaciones
- Arrancador monofásico SCRDocumento5 páginasArrancador monofásico SCRRafael Ramirez100% (1)
- Ensayo de SubestacionDocumento7 páginasEnsayo de Subestacionbiakuya kuchikiAún no hay calificaciones
- CALIDAD DE LA ENERGIìA ELEìCTRICA 2014-2Documento71 páginasCALIDAD DE LA ENERGIìA ELEìCTRICA 2014-2D.A. M.OAún no hay calificaciones
- Metodo de Calculo IECDocumento1 páginaMetodo de Calculo IECestevan gutierrezAún no hay calificaciones
- UNIDAD1 InstalacionesDocumento33 páginasUNIDAD1 InstalacionesOscar RodriguezAún no hay calificaciones
- Estabilidad Transitoria en Sistemas Multimaquina Potencia IIDocumento14 páginasEstabilidad Transitoria en Sistemas Multimaquina Potencia IIJUAN ISRAEL GREGORIO HUERTAAún no hay calificaciones
- Copia de Copia de FormatoDocumento5 páginasCopia de Copia de FormatoLaura V A. AriasAún no hay calificaciones
- Cálculo térmico conductores aéreos métodos Westinghouse VDEDocumento7 páginasCálculo térmico conductores aéreos métodos Westinghouse VDEcaedv77Aún no hay calificaciones
- Tema1 - Sistema Electrico de PotenciaDocumento55 páginasTema1 - Sistema Electrico de PotenciaSebastia Gelabert MascaroAún no hay calificaciones
- Flyback conmutado 150 kHz 12V 2ADocumento11 páginasFlyback conmutado 150 kHz 12V 2ACarlosRojasPAún no hay calificaciones
- Calculo de Mva - Marzo 2017Documento13 páginasCalculo de Mva - Marzo 2017JULIO ARTEROAún no hay calificaciones
- Diferencias y semejanzas entre máquinas síncronas y de corriente continuaDocumento12 páginasDiferencias y semejanzas entre máquinas síncronas y de corriente continuaAgataRoslarAún no hay calificaciones
- Polarización y Operación de Una Unidad de Protección de Sobrecorriente Direccional.Documento14 páginasPolarización y Operación de Una Unidad de Protección de Sobrecorriente Direccional.David VAún no hay calificaciones
- Clasificación NEMA motores inducciónDocumento5 páginasClasificación NEMA motores inducciónjaquivillaAún no hay calificaciones
- Summit - Electrio Lam 6-Cuadro de CargaDocumento1 páginaSummit - Electrio Lam 6-Cuadro de CargaAlejandro Kanito Alvarez SAún no hay calificaciones
- 02 - Arranque de Motores 3FDocumento19 páginas02 - Arranque de Motores 3FjuanAún no hay calificaciones
- Electronica de Potencia-Variadores de VelocidadDocumento12 páginasElectronica de Potencia-Variadores de VelocidadTu Xhikitho Carlos Zelaya0% (2)
- Estudio de Carga Vivero CunuyacuDocumento1 páginaEstudio de Carga Vivero CunuyacuJean CarloAún no hay calificaciones
- Transf Unicornio en CalleDocumento43 páginasTransf Unicornio en CalleDiana MárquezAún no hay calificaciones
- G0000 62 PDFDocumento17 páginasG0000 62 PDFerikaAún no hay calificaciones
- Sincronización generadores eléctricosDocumento5 páginasSincronización generadores eléctricosDairo Ruiz-LogreiraAún no hay calificaciones
- Pruebas Electricas VariasDocumento30 páginasPruebas Electricas VariasJorge RiveraAún no hay calificaciones
- Característica para Seleccionar Un Variador de Velocidad Por FrecuenciaDocumento3 páginasCaracterística para Seleccionar Un Variador de Velocidad Por Frecuencianeiker sulbaranAún no hay calificaciones
- Control de Velocidad Del Motor de InducciónDocumento7 páginasControl de Velocidad Del Motor de InducciónSteven CastroAún no hay calificaciones
- ConverDocumento10 páginasConverGabriel Rodriguez ParedesAún no hay calificaciones
- Variadores de VelocidadDocumento5 páginasVariadores de VelocidadJoséAún no hay calificaciones
- Sub Suelo 1-ModelDocumento1 páginaSub Suelo 1-ModelMarco Antonio Quispe RoqueAún no hay calificaciones
- Catalogo de Productos Iice 2013 PhicapDocumento9 páginasCatalogo de Productos Iice 2013 PhicapMarco Antonio Quispe RoqueAún no hay calificaciones
- Page 0005Documento1 páginaPage 0005Marco Antonio Quispe RoqueAún no hay calificaciones
- Catalogo Línea BrceDocumento4 páginasCatalogo Línea BrceMarco Antonio Quispe RoqueAún no hay calificaciones
- 8US19212AA00 Datasheet enDocumento3 páginas8US19212AA00 Datasheet enMarco Antonio Quispe RoqueAún no hay calificaciones
- Page 0005Documento1 páginaPage 0005Marco Antonio Quispe RoqueAún no hay calificaciones
- Page 0005Documento1 páginaPage 0005Marco Antonio Quispe RoqueAún no hay calificaciones
- 3NA3805 DatasheetDocumento4 páginas3NA3805 DatasheetMarco Antonio Quispe RoqueAún no hay calificaciones
- Arrancadores Suaves SiemensDocumento32 páginasArrancadores Suaves SiemensNelson100% (1)
- Simbox XF PDFDocumento8 páginasSimbox XF PDFMarco Antonio Quispe RoqueAún no hay calificaciones
- Arrancadores Suaves PDFDocumento1 páginaArrancadores Suaves PDFJOSE MIGUEL PINTOAún no hay calificaciones
- Derating Por AlturaDocumento2 páginasDerating Por AlturaMarco Antonio Quispe RoqueAún no hay calificaciones
- 8MR22000A Datasheet EsDocumento2 páginas8MR22000A Datasheet EsMarco Antonio Quispe RoqueAún no hay calificaciones
- Cablecanal LegrandDocumento1 páginaCablecanal LegrandMarco Antonio Quispe RoqueAún no hay calificaciones
- Vias de Chispa DehnDocumento1 páginaVias de Chispa DehnMarco Antonio Quispe RoqueAún no hay calificaciones
- Simbox XFDocumento8 páginasSimbox XFMarco Antonio Quispe Roque100% (1)
- SINAMICS V20 - Lista de Parametros - ESPDocumento12 páginasSINAMICS V20 - Lista de Parametros - ESPDiego Alejandro Gallardo Ibarra0% (1)
- Variadores de FercuanciaDocumento4 páginasVariadores de FercuanciaMarco Antonio Quispe RoqueAún no hay calificaciones
- Calculols de Proteccion CatodicaDocumento1 páginaCalculols de Proteccion CatodicaMarco Antonio Quispe RoqueAún no hay calificaciones
- RegularesDocumento11 páginasRegularesMarco Antonio Quispe RoqueAún no hay calificaciones
- Proteccion de Redes de Distribucion de MT (FINAL)Documento42 páginasProteccion de Redes de Distribucion de MT (FINAL)Marco Antonio Quispe RoqueAún no hay calificaciones
- 51Documento13 páginas51LaplaceFourierAún no hay calificaciones
- Lista de precios salud y seguridad industrialDocumento9 páginasLista de precios salud y seguridad industrialMarco Antonio Quispe RoqueAún no hay calificaciones
- TRAMEXDocumento36 páginasTRAMEXAlbertoAún no hay calificaciones
- BrotherDocumento11 páginasBrotherMarco Antonio Quispe RoqueAún no hay calificaciones
- Present - Normalizacion EPZDocumento30 páginasPresent - Normalizacion EPZMarco Antonio Quispe RoqueAún no hay calificaciones
- Programa Andescon 2014Documento4 páginasPrograma Andescon 2014Marco Antonio Quispe RoqueAún no hay calificaciones
- Carta para TutorDocumento1 páginaCarta para TutorMarco Antonio Quispe RoqueAún no hay calificaciones