También podría gustarte
- Informe de Practicas Pre-ProfesionalesDocumento14 páginasInforme de Practicas Pre-ProfesionalesBichoCremaAún no hay calificaciones
- Sensor FTPDocumento1 páginaSensor FTPAnonymous eELDHyPqmn100% (2)
- El Modelo EcologicoDocumento4 páginasEl Modelo EcologicoMiguel Montero100% (1)
- Quenallata Coyauri Julio - 18 Oct 2019Documento201 páginasQuenallata Coyauri Julio - 18 Oct 2019JahdielAún no hay calificaciones
- Geologia AplicadaDocumento81 páginasGeologia Aplicadaeves_25h100% (3)
- Planeador Abril Semana 2 ExploradoresDocumento5 páginasPlaneador Abril Semana 2 ExploradoresLUZ COCINEROAún no hay calificaciones
- Libro de Análisis y Diseño de Puentes Por El Método LRFDDocumento454 páginasLibro de Análisis y Diseño de Puentes Por El Método LRFDJose Mariano Ponton Calderon100% (5)
- La Experiencia Religiosa de La Nada en Bernhard Welte y Franz RosenzweigDocumento21 páginasLa Experiencia Religiosa de La Nada en Bernhard Welte y Franz RosenzweigMarcosAún no hay calificaciones
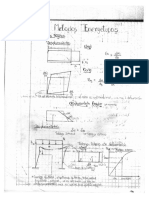
- Apuntes de Hipesestaticas IDocumento29 páginasApuntes de Hipesestaticas IJahdielAún no hay calificaciones
- Analisis EstructuralDocumento624 páginasAnalisis EstructuralJahdiel100% (1)
- Reporte Fotografico-Aforo de Trafico VehicularDocumento3 páginasReporte Fotografico-Aforo de Trafico VehicularJahdielAún no hay calificaciones
- Nava Chambi Miguel Angel - 21 Oct 2019Documento190 páginasNava Chambi Miguel Angel - 21 Oct 2019JahdielAún no hay calificaciones
- Callisaya Corsino Jimmy Osmar - 18 Oct 2019Documento139 páginasCallisaya Corsino Jimmy Osmar - 18 Oct 2019JahdielAún no hay calificaciones
- Tema 5 - Muros y Pantallas Bloque I PDFDocumento45 páginasTema 5 - Muros y Pantallas Bloque I PDFJahdielAún no hay calificaciones
- Formulario Reconoc. Trayectoria ProfesionalDocumento2 páginasFormulario Reconoc. Trayectoria ProfesionalJahdielAún no hay calificaciones
- Computacion para Ingenieria-UMSSDocumento320 páginasComputacion para Ingenieria-UMSSAlexis Manuel Torrez Fernandez100% (1)
- Tema 3 Estabilidad de Laderas Bloque IIDocumento94 páginasTema 3 Estabilidad de Laderas Bloque IIJoel SolanoAún no hay calificaciones
- Estructuras de Construcción - V.N. BaykovDocumento362 páginasEstructuras de Construcción - V.N. BaykovJahdiel100% (3)
- Ejercicios CimentacionesDocumento14 páginasEjercicios CimentacionesGerardo Solorzano100% (1)
- Tema 1 ConsolidacionDocumento51 páginasTema 1 Consolidacionmmjmzxc100% (1)
- Tema 5 - Muros y Pantallas Bloque I PDFDocumento45 páginasTema 5 - Muros y Pantallas Bloque I PDFJahdielAún no hay calificaciones
- Dosificacion Jimenez MontoyaDocumento20 páginasDosificacion Jimenez MontoyaJahdiel100% (1)
- Tema 3 Estabilidad de Laderas Bloque IIDocumento94 páginasTema 3 Estabilidad de Laderas Bloque IIJoel SolanoAún no hay calificaciones
- Tema 5 - Muros y Pantallas Bloque I PDFDocumento45 páginasTema 5 - Muros y Pantallas Bloque I PDFJahdielAún no hay calificaciones
- Alberche Es 4349Documento15 páginasAlberche Es 4349JahdielAún no hay calificaciones
- Tema 1 ConsolidacionDocumento51 páginasTema 1 Consolidacionmmjmzxc100% (1)
- Tema 3 Estabilidad de Laderas Bloque IIDocumento94 páginasTema 3 Estabilidad de Laderas Bloque IIJoel SolanoAún no hay calificaciones
- Resumen CurricularDocumento4 páginasResumen CurricularMirko Flores JimenezAún no hay calificaciones
- Aeropuertobarcelona Es 4342Documento4 páginasAeropuertobarcelona Es 4342JahdielAún no hay calificaciones
- Aeropuertozaragoza Es 4346Documento4 páginasAeropuertozaragoza Es 4346JahdielAún no hay calificaciones
- 05pilotes en Suelos GranularesDocumento19 páginas05pilotes en Suelos GranularesRudi Maslucan del CastilloAún no hay calificaciones
- Diseño de Puentes Estribos y Pilas - UmssDocumento49 páginasDiseño de Puentes Estribos y Pilas - UmssAndrew Vargas Condarco100% (5)
- T4086Documento189 páginasT4086JahdielAún no hay calificaciones
- Taller 2 Wisthon Betancourt - UNID-WPS OfficeDocumento5 páginasTaller 2 Wisthon Betancourt - UNID-WPS OfficeEstebanPinedaVelasquezAún no hay calificaciones
- Tema 2 - Método de ProyectosDocumento6 páginasTema 2 - Método de ProyectosJaydan MalyAún no hay calificaciones
- Practica 2 - Cartas IMRDocumento8 páginasPractica 2 - Cartas IMRMel CarAún no hay calificaciones
- SESION 12 CyT 3ero - 20223 EDA 2Documento4 páginasSESION 12 CyT 3ero - 20223 EDA 2Rubèn Gamarra GarciaAún no hay calificaciones
- Sociedad Tradicional VigenteDocumento5 páginasSociedad Tradicional VigenteRafaelAún no hay calificaciones
- Informe de AurelsaDocumento11 páginasInforme de AurelsaJuan Jose Jalanocca ValdiviaAún no hay calificaciones
- UntitledDocumento13 páginasUntitledBelen De los Santos100% (1)
- Guia Estudio 3 PAES 3M2023Documento2 páginasGuia Estudio 3 PAES 3M2023ellyarayapachecoAún no hay calificaciones
- Hoja de Seguridad Curathane 72 WPDocumento6 páginasHoja de Seguridad Curathane 72 WPcristian castroAún no hay calificaciones
- Tema 3 Aprendizaje Asociativo Mediante Condicionamiento ClasicoDocumento64 páginasTema 3 Aprendizaje Asociativo Mediante Condicionamiento ClasicoIrene RodriguezAún no hay calificaciones
- Tarea 9 Introduccion A La Psicoterapia - enDocumento9 páginasTarea 9 Introduccion A La Psicoterapia - enLeonela Díaz OlivoAún no hay calificaciones
- Fatima Peralta OjedaDocumento2 páginasFatima Peralta OjedaFatima Peralta100% (1)
- Competencias Laborales en GuatemalaDocumento6 páginasCompetencias Laborales en GuatemalaGerson RecinosAún no hay calificaciones
- Informe ReunionDocumento4 páginasInforme ReunionMaria Dennisee PavonAún no hay calificaciones
- Decodificar CelphoneDocumento5 páginasDecodificar CelphoneYamileth RiosAún no hay calificaciones
- Hoja de Trabajo 6to Primaria 2024Documento7 páginasHoja de Trabajo 6to Primaria 2024JG ARTAún no hay calificaciones
- 0143 2024 Inia BasesDocumento14 páginas0143 2024 Inia Basesleonelak2Aún no hay calificaciones
- Las Matematicas Creen en Dios-1Documento2 páginasLas Matematicas Creen en Dios-1Eduardo Segura BuenoAún no hay calificaciones
- Teor Del Color1Documento2 páginasTeor Del Color1Sisy PAAún no hay calificaciones
- Diez Pasos A La OscuridadDocumento331 páginasDiez Pasos A La OscuridadGoran Yakov Lausic King0% (1)
- El Proceso Constituyente Boliviano La Ac PDFDocumento62 páginasEl Proceso Constituyente Boliviano La Ac PDFPttJoséLuísPérezBañaresAún no hay calificaciones
- Fosa de Las MarinasDocumento32 páginasFosa de Las MarinasdavidperaltadiezAún no hay calificaciones
- Ensayo 9 Peso Unitario de Los AgregadosDocumento17 páginasEnsayo 9 Peso Unitario de Los AgregadosMashiell Laura Alvarez GomezAún no hay calificaciones
- Fee 4856Documento1 páginaFee 4856liliana muñozAún no hay calificaciones
- INFORME Cableado Estructurado SENADocumento9 páginasINFORME Cableado Estructurado SENAJeiison CardeenasAún no hay calificaciones