También podría gustarte
- 629 1612 1 PBDocumento13 páginas629 1612 1 PBdiegoman10Aún no hay calificaciones
- Cam ClayDocumento14 páginasCam ClayMixhel CastroAún no hay calificaciones
- Abril 17 2014 Los Errores Se Pagan Con PlataDocumento2 páginasAbril 17 2014 Los Errores Se Pagan Con Platadiegoman10Aún no hay calificaciones
- 629 1612 1 PBDocumento13 páginas629 1612 1 PBdiegoman10Aún no hay calificaciones
- Cam ClayDocumento12 páginasCam ClayJa DeAún no hay calificaciones
- Cam ClayDocumento12 páginasCam ClayJa DeAún no hay calificaciones
- Tesis519 PDFDocumento178 páginasTesis519 PDFdiegoman10Aún no hay calificaciones
- 629 1612 1 PBDocumento13 páginas629 1612 1 PBdiegoman10Aún no hay calificaciones
- Trabajo Dinámica de SistemasDocumento32 páginasTrabajo Dinámica de Sistemasdiegoman10Aún no hay calificaciones
- Tarifario 4 JulioDocumento22 páginasTarifario 4 Juliodiegoman10Aún no hay calificaciones
- Capacidad y Niveles de ServicioDocumento121 páginasCapacidad y Niveles de ServicioLoyda MarcelaAún no hay calificaciones
- Gts Ejemplos SismogramasDocumento20 páginasGts Ejemplos SismogramasAntonio Villena MartínAún no hay calificaciones
- Entrega 2 - Proyecto de Ingeniería IVDocumento14 páginasEntrega 2 - Proyecto de Ingeniería IVdiegoman10Aún no hay calificaciones
- Metodología de Aplicación de Revoque LanzadoDocumento4 páginasMetodología de Aplicación de Revoque Lanzadodiegoman10Aún no hay calificaciones
- Acelerograma Sismo Kobe NSDocumento2 páginasAcelerograma Sismo Kobe NSdiegoman10Aún no hay calificaciones
- 111 741 1 PBDocumento12 páginas111 741 1 PBCivil JoseAún no hay calificaciones
- Taller Interferencia DifraccionDocumento11 páginasTaller Interferencia Difracciondiegoman10Aún no hay calificaciones
- Trabajo Final ContaDocumento3 páginasTrabajo Final Contadiegoman10Aún no hay calificaciones
- Permeabilidad de Suelos GranularesDocumento7 páginasPermeabilidad de Suelos Granularesdiegoman10Aún no hay calificaciones
- 111 741 1 PBDocumento12 páginas111 741 1 PBCivil JoseAún no hay calificaciones
- Fuerza Cortante y Momento Flexionante en VigasDocumento6 páginasFuerza Cortante y Momento Flexionante en Vigasdiegoman10Aún no hay calificaciones
- NSR-10 Titulo HDocumento66 páginasNSR-10 Titulo HLuz Delia Arias Lievano80% (5)
- Elem MaqDocumento7 páginasElem Maqesteban_hto1Aún no hay calificaciones
- Evaluacion de CompetenciasDocumento9 páginasEvaluacion de Competenciasdiegoman10Aún no hay calificaciones
- Los Fundamentos Del Dise o Del BarcoDocumento18 páginasLos Fundamentos Del Dise o Del BarcomatogustavoAún no hay calificaciones
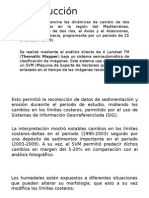
- IntroducciónDocumento9 páginasIntroduccióndiegoman10Aún no hay calificaciones
- Marco HistoricoDocumento2 páginasMarco Historicodiegoman10Aún no hay calificaciones
- Informe de Avance N 1 2.0Documento29 páginasInforme de Avance N 1 2.0diegoman10Aún no hay calificaciones
- Balanza de Pagos en ColombiaDocumento2 páginasBalanza de Pagos en Colombiadiegoman10Aún no hay calificaciones
- Muros de ContencionDocumento15 páginasMuros de ContencionLuis Manuel BaltodanoAún no hay calificaciones
- Incendios de Interfase Folleto Triptico 2022 Impresion DifusionDocumento2 páginasIncendios de Interfase Folleto Triptico 2022 Impresion Difusionleo vazquezAún no hay calificaciones
- Materiales Petreos NaturalesDocumento7 páginasMateriales Petreos NaturalesBismarck Duarte CentenoAún no hay calificaciones
- Curso ArchiCAD 15 AvanzadoDocumento1 páginaCurso ArchiCAD 15 Avanzadoportatil31164Aún no hay calificaciones
- 0 F 809 CDocumento12 páginas0 F 809 CVivían tezAún no hay calificaciones
- Act 11 Evidencia 6 Aceite de PalmaDocumento4 páginasAct 11 Evidencia 6 Aceite de PalmaLaura GarzonAún no hay calificaciones
- Cotizacion Instalacion de Unidades VRV IB INGENIEROSDocumento2 páginasCotizacion Instalacion de Unidades VRV IB INGENIEROSJuan Carlos Chapoñan SilvaAún no hay calificaciones
- Proyecto Carro SolarDocumento33 páginasProyecto Carro SolaryvanAún no hay calificaciones
- Jack Flower-TareaS2 LTEDocumento4 páginasJack Flower-TareaS2 LTEJack FlowerAún no hay calificaciones
- Evaluacion de La Calidad de Pan A Base de Harina de ChiaDocumento3 páginasEvaluacion de La Calidad de Pan A Base de Harina de ChiaRoberto BocanegraAún no hay calificaciones
- 04 - Taller 4 Periodo 3 - Juvenal Cortes - Fisica Basica - 10° - Jun 22 2021Documento4 páginas04 - Taller 4 Periodo 3 - Juvenal Cortes - Fisica Basica - 10° - Jun 22 2021LEANDRO ORTIZ TABARESAún no hay calificaciones
- Tarea No.1 Metodologia y Analisis de CasosDocumento8 páginasTarea No.1 Metodologia y Analisis de CasosMaileny Carolina Santos GarridoAún no hay calificaciones
- Oposición Archiveros Cortes GeneralesDocumento3 páginasOposición Archiveros Cortes GeneralesluisonAún no hay calificaciones
- SEM.3 - 3 Sec - FÍSICADocumento5 páginasSEM.3 - 3 Sec - FÍSICAjoelAún no hay calificaciones
- El TICKETDocumento10 páginasEl TICKETMaríaDelPilarPachecoCervantesAún no hay calificaciones
- Sociedad Anónima Abierta Articulo 260-264Documento6 páginasSociedad Anónima Abierta Articulo 260-264JhosselynAún no hay calificaciones
- Mdu PiscoDocumento35 páginasMdu PiscoAriana ChamacheAún no hay calificaciones
- HomeGlide Manua de UsuarioDocumento25 páginasHomeGlide Manua de UsuarioCreaciones Vilber0% (1)
- Tarea 4 Negocios Internacionales 1Documento13 páginasTarea 4 Negocios Internacionales 1mariaAún no hay calificaciones
- Laboratorio 8. SaponificaciónDocumento3 páginasLaboratorio 8. SaponificaciónFernanda SilvaAún no hay calificaciones
- ACTIVIDAD 8 - Plan de AcciónDocumento14 páginasACTIVIDAD 8 - Plan de AcciónJesús QuinteroAún no hay calificaciones
- Estrategias de P&GDocumento26 páginasEstrategias de P&Gcristal luAún no hay calificaciones
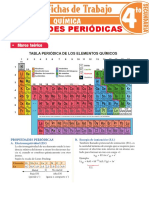
- Propiedades Periodicas para Cuarto Grado de SecundariaDocumento5 páginasPropiedades Periodicas para Cuarto Grado de SecundariaLeandroCarlosManayayAún no hay calificaciones
- Tema 1 - La Ilustración y La EducaciónDocumento6 páginasTema 1 - La Ilustración y La Educaciónluis 2002Aún no hay calificaciones
- 08 Liquenes MoodleDocumento1 página08 Liquenes Moodlecarmen diaz rodriguezAún no hay calificaciones
- LITERATURADocumento4 páginasLITERATURAHelena Sophie Volz OportoAún no hay calificaciones
- Historia SindicatoDocumento17 páginasHistoria Sindicatorodny gonzalezAún no hay calificaciones
- Gastroenterologia Tipeo Dos ColumnasDocumento15 páginasGastroenterologia Tipeo Dos Columnasjenny flor aquije juarezAún no hay calificaciones
- PML AmbDocumento25 páginasPML AmbDoris CTAún no hay calificaciones
- PRUEBA UNIDAD 2 7°básico AgostoDocumento8 páginasPRUEBA UNIDAD 2 7°básico AgostodanicastrorAún no hay calificaciones