También podría gustarte
- INGLES TECNICO - Clase 3Documento8 páginasINGLES TECNICO - Clase 3Carlos PedrazaAún no hay calificaciones
- Dispositivos de ComunicacionDocumento8 páginasDispositivos de ComunicacionCarlos PedrazaAún no hay calificaciones
- Mi Princesa Tiene Sus Dos Ojos 2Documento1 páginaMi Princesa Tiene Sus Dos Ojos 2Carlos PedrazaAún no hay calificaciones
- Clasificadores 2019 PDFDocumento156 páginasClasificadores 2019 PDFAlejandra MagneAún no hay calificaciones
- Introducción a la Informática BásicaDocumento27 páginasIntroducción a la Informática BásicaFidel MurciaAún no hay calificaciones
- Demos Adjetivos InglesDocumento9 páginasDemos Adjetivos InglesCarlos PedrazaAún no hay calificaciones
- Directrices 2019Documento139 páginasDirectrices 2019Luis Eduardo Martinez AlmanzaAún no hay calificaciones
- Vibraciones - Mecanicas Lab de Tecnologia de MaterialesDocumento104 páginasVibraciones - Mecanicas Lab de Tecnologia de MaterialesrosesalexAún no hay calificaciones
- Vibraciones - Mecanicas Lab de Tecnologia de MaterialesDocumento104 páginasVibraciones - Mecanicas Lab de Tecnologia de MaterialesrosesalexAún no hay calificaciones
- Los Ojos de Mi Princesa 2. Cuauhtemoc Sanchez Carlos. FRASES DE LIBROS PDFDocumento291 páginasLos Ojos de Mi Princesa 2. Cuauhtemoc Sanchez Carlos. FRASES DE LIBROS PDFCarlos Pedraza0% (1)
- SociodramaDocumento3 páginasSociodramaCarlos PedrazaAún no hay calificaciones
- Mi Princesa Tiene Sus Dos Ojos 2 PDFDocumento291 páginasMi Princesa Tiene Sus Dos Ojos 2 PDFCarlos PedrazaAún no hay calificaciones
- Los Ojos de Mi Princesa 2. Cuauhtemoc Sanchez Carlos. FRASES DE LIBROS PDFDocumento291 páginasLos Ojos de Mi Princesa 2. Cuauhtemoc Sanchez Carlos. FRASES DE LIBROS PDFCarlos PedrazaAún no hay calificaciones
- Vibraciones - Mecanicas Lab de Tecnologia de MaterialesDocumento104 páginasVibraciones - Mecanicas Lab de Tecnologia de MaterialesrosesalexAún no hay calificaciones
- Vibraciones - Mecanicas Lab de Tecnologia de MaterialesDocumento104 páginasVibraciones - Mecanicas Lab de Tecnologia de MaterialesrosesalexAún no hay calificaciones
- Aporte de La Psicologia A La EducacionDocumento10 páginasAporte de La Psicologia A La EducacionCarlos PedrazaAún no hay calificaciones
- Cuestionario de Estilos de AprendizajeDocumento12 páginasCuestionario de Estilos de AprendizajeCarlos PedrazaAún no hay calificaciones
- 658.022-M337p-Capitulo IIDocumento66 páginas658.022-M337p-Capitulo IICarlos PedrazaAún no hay calificaciones
- Metdoselecco A PDFDocumento3 páginasMetdoselecco A PDFCarlos PedrazaAún no hay calificaciones
- Formulario Mat FinancierasDocumento4 páginasFormulario Mat FinancierasCarlos PedrazaAún no hay calificaciones
- Inventario de las vías de recepción de la informaciónDocumento4 páginasInventario de las vías de recepción de la informaciónCarlos Pedraza0% (1)
- Instrucciones para El Trabajo FinalDocumento1 páginaInstrucciones para El Trabajo FinalCarlos PedrazaAún no hay calificaciones
- 658.022-M337p-Capitulo IDocumento20 páginas658.022-M337p-Capitulo ICarlos PedrazaAún no hay calificaciones
- Anal Del Sist BancaDocumento26 páginasAnal Del Sist BancaCarlos PedrazaAún no hay calificaciones
- Cuestionario de Estilos de AprendizajeDocumento12 páginasCuestionario de Estilos de AprendizajeCarlos PedrazaAún no hay calificaciones
- Laboratorio #1 - Medición de Resistencias, Voltajes y CorrientesDocumento3 páginasLaboratorio #1 - Medición de Resistencias, Voltajes y CorrientesJulio CabreraAún no hay calificaciones
- Especificaciones Tecnicas ArquitecturaDocumento16 páginasEspecificaciones Tecnicas ArquitecturaMiguel Egoavil TaipeAún no hay calificaciones
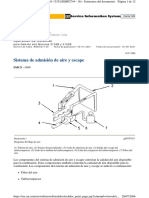
- 3126B Truck Engine Air & Exhaust SystemDocumento12 páginas3126B Truck Engine Air & Exhaust SystemBogar PinedaAún no hay calificaciones
- Comunicación RS485 ArduinoDocumento4 páginasComunicación RS485 ArduinoCesar Paiva RiveraAún no hay calificaciones
- Venta de Circuitos Integrados Serie 74HC - en Ciudad de MéxicoDocumento2 páginasVenta de Circuitos Integrados Serie 74HC - en Ciudad de MéxicoFausto JoséAún no hay calificaciones
- Práctica 3 Experimento de R. A MillikanDocumento9 páginasPráctica 3 Experimento de R. A MillikanMoises PeraltaAún no hay calificaciones
- Vinculo Entre La Arquitectura y La ConstrucciónDocumento12 páginasVinculo Entre La Arquitectura y La ConstrucciónJavier VasquezAún no hay calificaciones
- PR 063 00 Es Estudios Hazop SilDocumento50 páginasPR 063 00 Es Estudios Hazop SilSilvana Del CarpioAún no hay calificaciones
- Capital GateDocumento11 páginasCapital GateMarioMontalvo100% (1)
- Norma Astm C-702 Método A - 20 ProfeDocumento15 páginasNorma Astm C-702 Método A - 20 ProfeAngel VelasquezAún no hay calificaciones
- Diseño de desbaste en plantas de tratamiento de agua: rejas y tamicesDocumento15 páginasDiseño de desbaste en plantas de tratamiento de agua: rejas y tamicesNadia RamosAún no hay calificaciones
- Tratamiento Pulpa Guanabana PDFDocumento16 páginasTratamiento Pulpa Guanabana PDFSegundo Teofilo Cadenillas CabanillasAún no hay calificaciones
- Cortinas Aire Tarifa PVP SalvadorEscodaDocumento23 páginasCortinas Aire Tarifa PVP SalvadorEscodaaugv591211ve9Aún no hay calificaciones
- GSI-Índice de resistencia geológicaDocumento17 páginasGSI-Índice de resistencia geológicaAnonymous lOXP3FGgAún no hay calificaciones
- Ejercicios 14 15Documento8 páginasEjercicios 14 15Juan CarlosAún no hay calificaciones
- RTN380H en EsDocumento29 páginasRTN380H en EsERICK CHICONCULLOAún no hay calificaciones
- Avaluo Comercial EquiposDocumento1 páginaAvaluo Comercial Equiposjaespinoza6242Aún no hay calificaciones
- Informe Cascada Electroneumatica AvanzadaDocumento5 páginasInforme Cascada Electroneumatica Avanzadawilson sanchez ocanaAún no hay calificaciones
- Taller 02 U3 GasesDocumento22 páginasTaller 02 U3 GasesMarianh Karey Colque Centeno100% (1)
- Especificaciones TecnicasDocumento22 páginasEspecificaciones TecnicasKevin Lachos DíazAún no hay calificaciones
- Fundamentos y cálculo de cerchas de madera españolasDocumento3 páginasFundamentos y cálculo de cerchas de madera españolasJuanAún no hay calificaciones
- Informe de Julio PMT ChinacotaDocumento9 páginasInforme de Julio PMT ChinacotaGarcia Asociados TopografíaAún no hay calificaciones
- Requisitos mínimos instalaciones y condiciones laboralesDocumento5 páginasRequisitos mínimos instalaciones y condiciones laboralesLeidy Johana Gomez GomezAún no hay calificaciones
- PROCESO DE PRE RECEPCIÓN DE MERCANCÍADocumento9 páginasPROCESO DE PRE RECEPCIÓN DE MERCANCÍAAna Gisela0% (1)
- Cinética Química: Factores que Gobiernan la Velocidad de ReacciónDocumento40 páginasCinética Química: Factores que Gobiernan la Velocidad de Reacciónnicolas acostaAún no hay calificaciones
- Uso de La Cal en PavimentosDocumento10 páginasUso de La Cal en PavimentosEva Getsemani PantaleónAún no hay calificaciones
- Expediente PDFDocumento144 páginasExpediente PDFJuanCa PCAún no hay calificaciones
- Ficheros para El Examen Del DHCP PDFDocumento3 páginasFicheros para El Examen Del DHCP PDFLuis Jimenez PelazAún no hay calificaciones
- Guia de Aprendizaje Detención de ErroresDocumento19 páginasGuia de Aprendizaje Detención de ErroresYulipovdaAún no hay calificaciones
- S09.s1 - Material - MatricesDocumento36 páginasS09.s1 - Material - MatricesCristopher SanchoAún no hay calificaciones