También podría gustarte
- Codigo de Colores para ResistoresDocumento7 páginasCodigo de Colores para Resistoreskaye_1987Aún no hay calificaciones
- T2 ImprDocumento19 páginasT2 Imprkaye_1987Aún no hay calificaciones
- Ads 2011Documento78 páginasAds 2011kaye_1987Aún no hay calificaciones
- T2 ImprDocumento19 páginasT2 Imprkaye_1987Aún no hay calificaciones
- Sistema DME 2011Documento0 páginasSistema DME 2011kaye_1987Aún no hay calificaciones
- MatlabDocumento6 páginasMatlabcar2332100% (1)
- Sistemas ElectronicosDocumento26 páginasSistemas Electronicoskaye_1987Aún no hay calificaciones
- ST PR 05 Procedimiento para El Manejo de Sustancias QuimicasDocumento13 páginasST PR 05 Procedimiento para El Manejo de Sustancias QuimicasVanessa MorenoAún no hay calificaciones
- Prácticas Profesionalizantes ANTECEDENTES ASO ARG EMP 13Documento64 páginasPrácticas Profesionalizantes ANTECEDENTES ASO ARG EMP 13rafael ernestoAún no hay calificaciones
- 4 LiofilizacionDocumento9 páginas4 LiofilizacionMichael Pinto100% (1)
- Media KIT Revista Norte Minero 2014Documento5 páginasMedia KIT Revista Norte Minero 2014Lance EspinozaAún no hay calificaciones
- A Veinte Anos de La Teoria Del Cambio ConceptualDocumento4 páginasA Veinte Anos de La Teoria Del Cambio ConceptualLilita Barrientos JaraAún no hay calificaciones
- 04 Eu A4 Aquarea Smart Cloud 17 050916-Ensp-1610111-R1Documento2 páginas04 Eu A4 Aquarea Smart Cloud 17 050916-Ensp-1610111-R1Pilar SanchezAún no hay calificaciones
- Plan de Clases 5° Geometría #1Documento6 páginasPlan de Clases 5° Geometría #1Fabián ArrietaAún no hay calificaciones
- Necesidad de La Bioetica en La Educacion SuperiorDocumento6 páginasNecesidad de La Bioetica en La Educacion SuperiorArisaAún no hay calificaciones
- Lista Sobre Definiciones de Criminología.Documento15 páginasLista Sobre Definiciones de Criminología.Anthony AlmanzarAún no hay calificaciones
- Relacion de IngresosDocumento3 páginasRelacion de IngresosOliver NarváezAún no hay calificaciones
- Resolución 4272 de 2021 - ALTURASDocumento20 páginasResolución 4272 de 2021 - ALTURASJane BerrioAún no hay calificaciones
- Fuente Regulada 0 A 15V - 2A (Protección Contra Cortocircuitos)Documento2 páginasFuente Regulada 0 A 15V - 2A (Protección Contra Cortocircuitos)osmar rafael monsalve valenciaAún no hay calificaciones
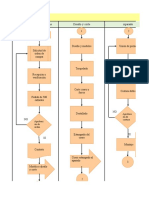
- Diagrama de FlujoDocumento16 páginasDiagrama de FlujoJaneth VasquezAún no hay calificaciones
- Libreto Titulación 2023Documento9 páginasLibreto Titulación 2023Soledad CanquilAún no hay calificaciones
- Trabajo de Investigacion para La Unidad No 3 de MantenimientoDocumento11 páginasTrabajo de Investigacion para La Unidad No 3 de MantenimientoHector Alejandro Jimenez GallegosAún no hay calificaciones
- Teoría de La LeyDocumento11 páginasTeoría de La LeyCatalina UrzúaAún no hay calificaciones
- Maquinas para La PlantaDocumento14 páginasMaquinas para La PlantaZulmy Roque GuadalupeAún no hay calificaciones
- La HistorietaDocumento15 páginasLa HistorietaFreddy Manuel Cayllahua ChucariAún no hay calificaciones
- CJ - Un Show Más Wiki - FANDOM Powered by WikiaDocumento7 páginasCJ - Un Show Más Wiki - FANDOM Powered by WikiaIntel_Pentium_IAún no hay calificaciones
- Análisis y Crítica Literaria. Métodos, Instrumentos y Técnicas.Documento9 páginasAnálisis y Crítica Literaria. Métodos, Instrumentos y Técnicas.Ernesto Piñeiro GarcíaAún no hay calificaciones
- Diagrama Equilibrio SolidoDocumento57 páginasDiagrama Equilibrio SolidoJulio GuerreroAún no hay calificaciones
- T4 Cambio Climático (Ene-2019)Documento28 páginasT4 Cambio Climático (Ene-2019)leonanrdoAún no hay calificaciones
- Programa Seguridad y Salud en El TrabajoDocumento66 páginasPrograma Seguridad y Salud en El Trabajomaria bravoAún no hay calificaciones
- Proyecto 3 Contador 0 A 99Documento6 páginasProyecto 3 Contador 0 A 99Yamid GambaAún no hay calificaciones
- Impulsividad y Facetas de La PersonalidDocumento11 páginasImpulsividad y Facetas de La Personalidluna pupunovichAún no hay calificaciones
- Empresas Leasing OperacionalDocumento150 páginasEmpresas Leasing OperacionalCamilo Peña MoraAún no hay calificaciones
- Introducion A Los Sistemas de Bases de Datos CJ DateDocumento11 páginasIntroducion A Los Sistemas de Bases de Datos CJ DateByron Martinez Alarcon0% (1)
- Acondicionamiento Del SueloDocumento14 páginasAcondicionamiento Del SueloJose AlexanderAún no hay calificaciones