También podría gustarte
- Considere Los Costos Totales y Los Ingresos Totales de La Siguiente TablaDocumento4 páginasConsidere Los Costos Totales y Los Ingresos Totales de La Siguiente TablaVictor Manuel78% (9)
- Ejemplo Completo Darma ConsultingDocumento139 páginasEjemplo Completo Darma ConsultingImelda Ramirez83% (12)
- Generación Del Vapor - MESNY Marcelo PDFDocumento454 páginasGeneración Del Vapor - MESNY Marcelo PDFsebadoi86% (7)
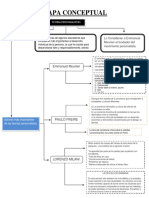
- Redaccion Mapa ConceptualDocumento1 páginaRedaccion Mapa Conceptualenzo100% (1)
- Detector de Metales ArcoDocumento56 páginasDetector de Metales ArcoWalter ChavezAún no hay calificaciones
- Libro de Gestion Por Procesos Velazco MB 141 221Documento81 páginasLibro de Gestion Por Procesos Velazco MB 141 221sebadoiAún no hay calificaciones
- Libro Procesos Harrigton 1 50Documento50 páginasLibro Procesos Harrigton 1 50sebadoiAún no hay calificaciones
- Libro de Gestion Por Procesos Velazco MB 1 70Documento70 páginasLibro de Gestion Por Procesos Velazco MB 1 70sebadoiAún no hay calificaciones
- 08.aceros Diagramas Hierro CarbonoDocumento23 páginas08.aceros Diagramas Hierro CarbonoEduardo PiedrahitaAún no hay calificaciones
- 08.aceros Diagramas Hierro CarbonoDocumento23 páginas08.aceros Diagramas Hierro CarbonoEduardo PiedrahitaAún no hay calificaciones
- Estabilidad Segundo Curso - Fliess Enrique Estabilidad DosDocumento321 páginasEstabilidad Segundo Curso - Fliess Enrique Estabilidad Doscamello100% (3)
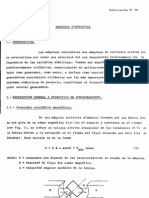
- Apunte Maquinas SincronicasDocumento35 páginasApunte Maquinas SincronicasMaspc ComputacionAún no hay calificaciones
- Semana 2-Sesión 2 - Gestión Por CompetenciasDocumento35 páginasSemana 2-Sesión 2 - Gestión Por CompetenciasingridAún no hay calificaciones
- Presentacion de GramaticaDocumento20 páginasPresentacion de GramaticaCarlos CabreraAún no hay calificaciones
- Cuestionario Estilo Hombre ClienteDocumento4 páginasCuestionario Estilo Hombre Clienteayaxyax15Aún no hay calificaciones
- Tabasco PrimariaDocumento28 páginasTabasco PrimariaIsabel ChableAún no hay calificaciones
- Como Salir de La PobrezaDocumento7 páginasComo Salir de La Pobrezaalexcoloradito7Aún no hay calificaciones
- Rubrica InfografiaDocumento1 páginaRubrica InfografiaAlejandra Casanova BarriaAún no hay calificaciones
- Tres Días de Permiso Por Motivos PersonalesDocumento7 páginasTres Días de Permiso Por Motivos PersonalesFernando Gamarra Morales86% (7)
- Curriculum Vitae Rodolfo Garcia Silva Ingeniero Civil Industrial Mayo 2012 PDFDocumento4 páginasCurriculum Vitae Rodolfo Garcia Silva Ingeniero Civil Industrial Mayo 2012 PDFJaviera Soledad Carmona LopezAún no hay calificaciones
- JUAN D. TRINCADO RIGLOS - Vida de MaríaDocumento87 páginasJUAN D. TRINCADO RIGLOS - Vida de Maríaporfiriorc100% (1)
- Final Inter-Libre Copa Temporada 2022 Julio 10 2022Documento1 páginaFinal Inter-Libre Copa Temporada 2022 Julio 10 2022raul hernandezAún no hay calificaciones
- Implementacion y Diseño de CompuertasDocumento3 páginasImplementacion y Diseño de CompuertasKaren AriasAún no hay calificaciones
- Cierre PatronalDocumento4 páginasCierre PatronalWily Diaz RodríguezAún no hay calificaciones
- Aspectos Relevantes de La Crisis EconomicaDocumento8 páginasAspectos Relevantes de La Crisis EconomicaTwisterEnlaceAún no hay calificaciones
- Funciones AdministrativasDocumento6 páginasFunciones AdministrativasHenry CabnalAún no hay calificaciones
- s6 5 Prim Anexo Dia 1 TextoDocumento2 páginass6 5 Prim Anexo Dia 1 TextoCristinaSegoviaBarretoAún no hay calificaciones
- Autotrofos y HeterotrofosDocumento12 páginasAutotrofos y HeterotrofosDulce KrabappelAún no hay calificaciones
- Actividad 2Documento3 páginasActividad 2Elizabeth Calero OnofreAún no hay calificaciones
- Aliaga PCD-SDDocumento83 páginasAliaga PCD-SDFernandoAntonioFloresLimoAún no hay calificaciones
- Ondas Cerebrales - Conciencia y Cognición. Actulización 2021Documento8 páginasOndas Cerebrales - Conciencia y Cognición. Actulización 2021Eduardo SciottoAún no hay calificaciones
- Analisis Financiero Carvajal S.A 2019-2018Documento13 páginasAnalisis Financiero Carvajal S.A 2019-2018Jose BanquethAún no hay calificaciones
- Historia de La Geotecnia16AADocumento3 páginasHistoria de La Geotecnia16AAARIAS100% (1)
- Mapa Conceptual Actividad 1Documento2 páginasMapa Conceptual Actividad 1reneAún no hay calificaciones
- Manuscrito Señor Manda Obreros A Tu MiesDocumento10 páginasManuscrito Señor Manda Obreros A Tu MiesRuben TelloAún no hay calificaciones
- ConsultaDocumento24 páginasConsultaheidi martinezAún no hay calificaciones
- Proyecto - "Mejoramos El Patio de Nuestro Jardín"Documento6 páginasProyecto - "Mejoramos El Patio de Nuestro Jardín"Mariana PetrarcaAún no hay calificaciones
- Reporte para Notificación Plan de Mejoramiento 3er Trimestre Básica Secundaria y MediaDocumento29 páginasReporte para Notificación Plan de Mejoramiento 3er Trimestre Básica Secundaria y MediaJuan Pablo RojasAún no hay calificaciones