También podría gustarte
- Propuesta Sistema de Control ContinuoDocumento3 páginasPropuesta Sistema de Control ContinuoLeo DelgadilloAún no hay calificaciones
- Termografía PasivaDocumento50 páginasTermografía PasivaLeo Delgadillo100% (2)
- Manual Soporte Tecnico 5856 CompletoDocumento50 páginasManual Soporte Tecnico 5856 CompletoJulian PrinoAún no hay calificaciones
- Tracking Matlab TIC TAE TOEDocumento18 páginasTracking Matlab TIC TAE TOELeo DelgadilloAún no hay calificaciones
- Fuentes de Energía para Dispositivos Biomédicos PortátilesDocumento11 páginasFuentes de Energía para Dispositivos Biomédicos PortátilesLeo DelgadilloAún no hay calificaciones
- Fuentes de Energía para Dispositivos Biomédicos PortátilesDocumento11 páginasFuentes de Energía para Dispositivos Biomédicos PortátilesLeo DelgadilloAún no hay calificaciones
- Corriente de Corto Circuito en Baja TensionDocumento20 páginasCorriente de Corto Circuito en Baja TensionCarlos Lovera RodriguezAún no hay calificaciones
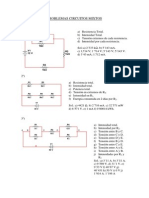
- Problemas Resueltos Circuitos Mixto PDFDocumento1 páginaProblemas Resueltos Circuitos Mixto PDF4pl4570k4k074550% (2)
- Muestreo Digital PDFDocumento12 páginasMuestreo Digital PDFhryetresaAún no hay calificaciones
- DerivadasDocumento5 páginasDerivadasLeo DelgadilloAún no hay calificaciones
- Porque Estar Vs POODocumento6 páginasPorque Estar Vs POOLeo DelgadilloAún no hay calificaciones
- Tema 01 12Documento1 páginaTema 01 12Gilberto BeckfordAún no hay calificaciones
- Reordenamiento de SeriesDocumento36 páginasReordenamiento de SeriesKrav MagaAún no hay calificaciones
- La Biblia de Access 2007Documento171 páginasLa Biblia de Access 2007Francisco de ML100% (17)
- UntitledDocumento1 páginaUntitledLeo DelgadilloAún no hay calificaciones
- Zelio Logic SR2SFT01Documento1 páginaZelio Logic SR2SFT01'Andres TorregrosaAún no hay calificaciones
- Cimentación Sobre RellenosDocumento2 páginasCimentación Sobre RellenosBrayan Taboada Pacheco100% (2)
- Sostenimiento Con ShotcreteDocumento52 páginasSostenimiento Con ShotcreteFelix AlvarezAún no hay calificaciones
- Varillero de Refuerzo - PracticaDocumento3 páginasVarillero de Refuerzo - PracticaYandhyra DiazAún no hay calificaciones
- Burger, R., 2008. Chavín de Huántar y Su Esfera de InfluenciaDocumento23 páginasBurger, R., 2008. Chavín de Huántar y Su Esfera de InfluenciaLeandro KochAún no hay calificaciones
- Administración de Servidores UNIDAD 4.Documento11 páginasAdministración de Servidores UNIDAD 4.MaryFer RcAún no hay calificaciones
- Trabajo Final 03Documento54 páginasTrabajo Final 03Enrique MirandaAún no hay calificaciones
- Proyecto Vial - Moche - Elvis Davalos ClavoDocumento9 páginasProyecto Vial - Moche - Elvis Davalos ClavoManuel MateyAún no hay calificaciones
- PUCPDocumento1 páginaPUCPKelly Lucio noelAún no hay calificaciones
- PRESUPUESTO ExelDocumento8 páginasPRESUPUESTO ExelEnrique Octavio Damian PongoAún no hay calificaciones
- 27 Senderos Pirineos de Navarra PDFDocumento27 páginas27 Senderos Pirineos de Navarra PDFalecnop52Aún no hay calificaciones
- Experiencia Educativa de Sintesis Del Proyecto ArquitectonicoDocumento10 páginasExperiencia Educativa de Sintesis Del Proyecto ArquitectonicoArizteo ZenitAún no hay calificaciones
- Analisis de Sitio Proyecto 3Documento174 páginasAnalisis de Sitio Proyecto 3Alejandro Espinoza RodríguezAún no hay calificaciones
- El Número de Oro en Otras ÁreasDocumento5 páginasEl Número de Oro en Otras ÁreasLuis Mendoza100% (1)
- Diseño Estructural de Un Edificio de 12 PisosDocumento24 páginasDiseño Estructural de Un Edificio de 12 PisosCarlos AnteparaAún no hay calificaciones
- Manual NAS Thecus N5200Documento96 páginasManual NAS Thecus N5200Juan LozanoAún no hay calificaciones
- Dibujo I - UCDocumento77 páginasDibujo I - UCJeymis P. De la Cruz PalaciosAún no hay calificaciones
- Partition WizardDocumento45 páginasPartition WizardkikithabonitaAún no hay calificaciones
- Zapata CorridaDocumento18 páginasZapata CorridaDaryan RuizAún no hay calificaciones
- Urba 1304 220 1 EfDocumento4 páginasUrba 1304 220 1 EfLady RosasAún no hay calificaciones
- Iluminación FísicaDocumento8 páginasIluminación FísicaJuan Carlos Molina RuizAún no hay calificaciones
- Circuito Turistico Juliaca TaracoDocumento2 páginasCircuito Turistico Juliaca TaracoGuido YapuchuraAún no hay calificaciones
- Gómez Gómez - La Iconografía Del Parto en El Románico PDFDocumento23 páginasGómez Gómez - La Iconografía Del Parto en El Románico PDFpablo pucheAún no hay calificaciones
- 1.2.4.4 Packet Tracer - Representing The Network Instructions IGDocumento18 páginas1.2.4.4 Packet Tracer - Representing The Network Instructions IGOmar pedrazaAún no hay calificaciones
- Valentina Castro. Texto Etnografico Torre Del RelojDocumento2 páginasValentina Castro. Texto Etnografico Torre Del RelojValentinaAún no hay calificaciones
- Romanico Introduccion PDFDocumento39 páginasRomanico Introduccion PDFAgustin FrosoniAún no hay calificaciones
- Alojamiento WebDocumento12 páginasAlojamiento Webkaren100% (1)
- Diseño de DatacenterDocumento25 páginasDiseño de DatacenterNelson VargasAún no hay calificaciones
- Detalles Arq Verde y RenovableDocumento1 páginaDetalles Arq Verde y RenovableMaría Del Rosario VásquezAún no hay calificaciones
- Modelo Inventario Con Registro FotográficoDocumento8 páginasModelo Inventario Con Registro FotográficojenniferAún no hay calificaciones