También podría gustarte
- Dialnet LaHistoriaDeEmma 4836752 PDFDocumento8 páginasDialnet LaHistoriaDeEmma 4836752 PDFEmma VazquezAún no hay calificaciones
- Contrato Arrendamiento Lamudi MX1Documento9 páginasContrato Arrendamiento Lamudi MX1RamFranciscoAún no hay calificaciones
- Solicitud FinalDocumento3 páginasSolicitud FinalFender UgaldeAún no hay calificaciones
- Caratula Portada Tesis 1Documento2 páginasCaratula Portada Tesis 1Fender UgaldeAún no hay calificaciones
- Tutorial Mysql PDFDocumento17 páginasTutorial Mysql PDFnutrelAún no hay calificaciones
- Conclusiones y Recomendaciones en Un Trabajo de InvestigaciónDocumento3 páginasConclusiones y Recomendaciones en Un Trabajo de InvestigaciónFender UgaldeAún no hay calificaciones
- Economía - Guia Primer ParcialDocumento1 páginaEconomía - Guia Primer ParcialFender UgaldeAún no hay calificaciones
- Tema 3 CompletoDocumento41 páginasTema 3 CompletoFender UgaldeAún no hay calificaciones
- Moldeo Por Soplado y RotacionalDocumento13 páginasMoldeo Por Soplado y RotacionalAyda RamírezAún no hay calificaciones
- Manual de Instalaciones EmecDocumento462 páginasManual de Instalaciones EmecFender Ugalde75% (4)
- Tema 2 CompletoDocumento36 páginasTema 2 CompletoFender UgaldeAún no hay calificaciones
- Tema 1 CompletoDocumento64 páginasTema 1 CompletoFender UgaldeAún no hay calificaciones
- Analisis de RutasDocumento12 páginasAnalisis de RutasFender UgaldeAún no hay calificaciones
- Altos HornosDocumento4 páginasAltos HornosFender UgaldeAún no hay calificaciones
- Barreras de Entrada y SalidaDocumento16 páginasBarreras de Entrada y SalidaFender UgaldeAún no hay calificaciones
- AXIODIS Optimizacion de RutasDocumento5 páginasAXIODIS Optimizacion de RutasEulises CustodioAún no hay calificaciones
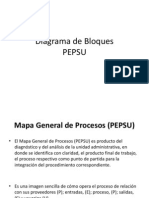
- Diagrama de Bloques PEPSUDocumento24 páginasDiagrama de Bloques PEPSUFender UgaldeAún no hay calificaciones
- Cufgpcreacion FundacionDocumento47 páginasCufgpcreacion FundacionTanya BöcklinAún no hay calificaciones
- Certified Community Manager and Social Apps DeveloperDocumento12 páginasCertified Community Manager and Social Apps DeveloperFender UgaldeAún no hay calificaciones
- BTT - Manual de Mountain BikeDocumento87 páginasBTT - Manual de Mountain BikeMatias Lopez Faxion MixAún no hay calificaciones
- Analisis FodaDocumento24 páginasAnalisis FodaJaime Pelaez99% (83)
- Metodos de Inferencia para La Distribucion WEIBULL - Aplicacion en Fiabilidad IndustrialDocumento68 páginasMetodos de Inferencia para La Distribucion WEIBULL - Aplicacion en Fiabilidad IndustrialFender UgaldeAún no hay calificaciones
- Administración de Personal - Cuadro SinópticoDocumento1 páginaAdministración de Personal - Cuadro SinópticoFender UgaldeAún no hay calificaciones
- Manual Cocinas SolaresDocumento58 páginasManual Cocinas SolaresOnda Natura - Quintaesencia CreativaAún no hay calificaciones
- Soluciones Prueba Extremos 07-08Documento8 páginasSoluciones Prueba Extremos 07-08Fender UgaldeAún no hay calificaciones
- Manual de Servicio A RefrigeradoresDocumento8 páginasManual de Servicio A Refrigeradoresdeimos1Aún no hay calificaciones
- Soluciones Prueba Extremos 07-08Documento8 páginasSoluciones Prueba Extremos 07-08Fender UgaldeAún no hay calificaciones
- Planillas de Inscripcion PeloterosDocumento2 páginasPlanillas de Inscripcion PeloterosRoberto Jose Hernandez Ortiz100% (1)
- Los Musculos y Sus FuncionesDocumento5 páginasLos Musculos y Sus FuncionesCesAún no hay calificaciones
- Silabo Edu. Fis. Abril-Sept. 2020Documento29 páginasSilabo Edu. Fis. Abril-Sept. 2020Antonio CujiAún no hay calificaciones
- Entrenamiento FuncionalDocumento24 páginasEntrenamiento Funcionalitzelmoncadazp0229Aún no hay calificaciones
- Coleccion Estrategia 3 PDFDocumento144 páginasColeccion Estrategia 3 PDFEdgar Anzola100% (2)
- LIBRO Diseño Del Entrenamiento Del Balonmano en SecundariaDocumento114 páginasLIBRO Diseño Del Entrenamiento Del Balonmano en SecundariaJherry AbacheAún no hay calificaciones
- Smyslow Teoria de Finales de Torre PDFDocumento100 páginasSmyslow Teoria de Finales de Torre PDFEzequiel Meler50% (2)
- Propuesta Unidad Didáctica Educación FísicaDocumento19 páginasPropuesta Unidad Didáctica Educación FísicaQuiñones Yefri JosueAún no hay calificaciones
- Examen Escrito 99Documento12 páginasExamen Escrito 99Juan BlancoAún no hay calificaciones
- Por Qué Los Jóvenes Deportistas No Tienen DisciplinaDocumento2 páginasPor Qué Los Jóvenes Deportistas No Tienen DisciplinaPepito AlcachofaAún no hay calificaciones
- Brico-Manual - Restauración Completa Motor M51 TDS - BMW FAQ Club - PARTE 3Documento3 páginasBrico-Manual - Restauración Completa Motor M51 TDS - BMW FAQ Club - PARTE 3eguren_91Aún no hay calificaciones
- SequoiaDocumento18 páginasSequoiajosenriqueprado100% (1)
- Arte y Cinematografía. 1-7-31!8!1931, N.º 363Documento27 páginasArte y Cinematografía. 1-7-31!8!1931, N.º 363walterdadaAún no hay calificaciones
- Curso de Progresion y Rescate VerticalDocumento131 páginasCurso de Progresion y Rescate VerticalJavizAún no hay calificaciones
- Apertura de Cancha de Gras Sintético para La Práctica de Futbol 6Documento12 páginasApertura de Cancha de Gras Sintético para La Práctica de Futbol 6GR KeysiAún no hay calificaciones
- Estudiantes, Mensualidades y PadresDocumento261 páginasEstudiantes, Mensualidades y PadresNildo TacuziAún no hay calificaciones
- Programa Arrain Azoka 2023Documento6 páginasPrograma Arrain Azoka 2023itsasoAún no hay calificaciones
- La Historia de La Educación FísicaDocumento3 páginasLa Historia de La Educación FísicaSebastianForeroAún no hay calificaciones
- Azulejo 3Documento112 páginasAzulejo 3lilimm2Aún no hay calificaciones
- Ultimate FrisbeeDocumento70 páginasUltimate FrisbeeAbraham LandázuryAún no hay calificaciones
- Solicitud 20 21 IsmaDocumento1 páginaSolicitud 20 21 IsmaDavidAún no hay calificaciones
- Difusión Mundial Del BoxeoDocumento7 páginasDifusión Mundial Del BoxeoCashlo Andres100% (1)
- Delimitaciones UrbanasDocumento1 páginaDelimitaciones UrbanasLucia ChavezAún no hay calificaciones
- Sellado - RedacciónDocumento10 páginasSellado - RedacciónnancyAún no hay calificaciones
- SalidaDocumento4 páginasSalidaSharon AlvarezAún no hay calificaciones
- Los Galeones Espanoles Del Siglo XVII PDFDocumento352 páginasLos Galeones Espanoles Del Siglo XVII PDFjose50% (2)
- Firma FalsaDocumento6 páginasFirma FalsaRubi MedinaAún no hay calificaciones
- BALONCESTODocumento3 páginasBALONCESTO20592070Aún no hay calificaciones
- Curva de Retorno VenosoDocumento15 páginasCurva de Retorno VenosoEL PAPI DE LAS NENASAún no hay calificaciones
- La Evolución Del Juego de Kunio-Kun (1986-2019)Documento3 páginasLa Evolución Del Juego de Kunio-Kun (1986-2019)Emanuel FooliniAún no hay calificaciones