También podría gustarte
- Seminario de Estadística TAREADocumento5 páginasSeminario de Estadística TAREACarlos Muñoz50% (4)
- Líneas de Transmisión Tarea 2Documento4 páginasLíneas de Transmisión Tarea 2Carlos MuñozAún no hay calificaciones
- Sesion de Aprendizaje - La Capa de Ozono - 6 GradoDocumento2 páginasSesion de Aprendizaje - La Capa de Ozono - 6 GradoSandra Casavilca de la Cruz71% (7)
- Equilibrio RelativoDocumento22 páginasEquilibrio Relativojunior ccaihuari hoyosAún no hay calificaciones
- Líneas de TransmisiónDocumento4 páginasLíneas de TransmisiónCarlos MuñozAún no hay calificaciones
- Puesta A TierraDocumento5 páginasPuesta A TierraCarlos MuñozAún no hay calificaciones
- Desarrollo de Una Prótesis MioeléctricasDocumento1 páginaDesarrollo de Una Prótesis MioeléctricasCarlos MuñozAún no hay calificaciones
- COTIZACIONDocumento1 páginaCOTIZACIONCarlos MuñozAún no hay calificaciones
- COTIZACIONDocumento1 páginaCOTIZACIONCarlos MuñozAún no hay calificaciones
- ConclusionesDocumento1 páginaConclusionesCarlos Muñoz100% (2)
- Certificado de HonorabilidadDocumento1 páginaCertificado de HonorabilidadCarlos MuñozAún no hay calificaciones
- Trabajo Practico N 6Documento5 páginasTrabajo Practico N 6Carlos MuñozAún no hay calificaciones
- My PDFDocumento5 páginasMy PDFDeimos StarkAún no hay calificaciones
- Electronica Industrial JTDocumento20 páginasElectronica Industrial JTaquino johanAún no hay calificaciones
- CronosDocumento39 páginasCronosValentina Gonzalez Ku100% (1)
- Copia de Repaso Vacacional Completo 6Documento73 páginasCopia de Repaso Vacacional Completo 6Vero CarreroAún no hay calificaciones
- Resumen Capítulo 1, 2, 3 y 4 de La Psicología de La Conducta de José BlegerDocumento10 páginasResumen Capítulo 1, 2, 3 y 4 de La Psicología de La Conducta de José Blegerjuliette100% (3)
- Importancia de Los MetalesDocumento6 páginasImportancia de Los MetalesAlvaro GutierrezAún no hay calificaciones
- El Mito de La Caverna de PlatónDocumento2 páginasEl Mito de La Caverna de PlatónYadira Sugei MARQUEZ CAMAHUALIAún no hay calificaciones
- 1 Colonialismo y EvolucionismoDocumento15 páginas1 Colonialismo y EvolucionismoAlejandro Gonzalez Silva0% (1)
- Diseño de SifonesDocumento12 páginasDiseño de SifonesVictor Alejandro Calderón GonzálezAún no hay calificaciones
- T4 Sistemas de Identificación. CriptografíaDocumento5 páginasT4 Sistemas de Identificación. CriptografíaJCDIAún no hay calificaciones
- Practico 7 Adm OpDocumento9 páginasPractico 7 Adm Op[Kumi]Aún no hay calificaciones
- Ta - 5 3Documento6 páginasTa - 5 3Jovani ToranzoAún no hay calificaciones
- Manual Contra IncendiosDocumento35 páginasManual Contra IncendiosMartin Centella Samano100% (3)
- Clase 4 - Geografia GeneralDocumento28 páginasClase 4 - Geografia GeneralNelida Melissa Aguilar YsuizaAún no hay calificaciones
- Tipos de ContaminaciónDocumento3 páginasTipos de ContaminaciónJhose GarciaAún no hay calificaciones
- Tropofonia Rosario. Programa Especial Milan Kundera.Documento7 páginasTropofonia Rosario. Programa Especial Milan Kundera.Ludmila BaukAún no hay calificaciones
- Limpieza Pública en JapónDocumento6 páginasLimpieza Pública en JapónYuri LplAún no hay calificaciones
- Diagnostico OrganizacionalDocumento14 páginasDiagnostico OrganizacionaljimenezramirezAún no hay calificaciones
- OK - GUIA No.3 - TECNOLOGIA - GRADO 4° Pdo. I 2023-1Documento1 páginaOK - GUIA No.3 - TECNOLOGIA - GRADO 4° Pdo. I 2023-1Mildred Rodriguez CardozoAún no hay calificaciones
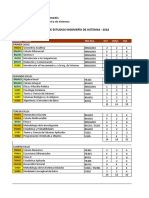
- PLAN ESTUDIOS INGENIERIA SISTEMAS 2018 v01 - VERSION - 01 Pages 1 4Documento4 páginasPLAN ESTUDIOS INGENIERIA SISTEMAS 2018 v01 - VERSION - 01 Pages 1 4Marco Antonio Vela RodriguezAún no hay calificaciones
- Wanda RodriguezDocumento5 páginasWanda RodriguezPsicología Educativa LUZ-COLAún no hay calificaciones
- Sistema de Clasificación Unificado Del SueloDocumento3 páginasSistema de Clasificación Unificado Del Sueloanlygh994Aún no hay calificaciones
- Cadena Respiratoria y Fosforilación OxidativaDocumento40 páginasCadena Respiratoria y Fosforilación OxidativaDaniela LeónAún no hay calificaciones
- Dokumen - Tips - Catalogo Aluminio MiyasatoDocumento10 páginasDokumen - Tips - Catalogo Aluminio Miyasato2023ideas2023Aún no hay calificaciones
- Quadro Rectangular 40x25 - Ficha TecnicaDocumento12 páginasQuadro Rectangular 40x25 - Ficha TecnicaMiguel MansillaAún no hay calificaciones
- Tornillo Sin Fin y CoronaDocumento4 páginasTornillo Sin Fin y CoronaCristhian Ustariz SalgueroAún no hay calificaciones
- Triptico DerechoDocumento2 páginasTriptico DerechoSebastian Salim RiveraAún no hay calificaciones
- Catalogo Tda-Compact EsDocumento2 páginasCatalogo Tda-Compact EsEddy Fernando Queca CadizAún no hay calificaciones