También podría gustarte
- Modelo de Factura de Proveedor InformalDocumento1 páginaModelo de Factura de Proveedor InformalManuel AbreuAún no hay calificaciones
- Ejercicios Controladores PidDocumento71 páginasEjercicios Controladores PidJosue Tuz Poot100% (2)
- Pestaña de RevisarDocumento3 páginasPestaña de RevisarAntonio Maria de Garcia Sanchez JimenezAún no hay calificaciones
- Tarea 1 Caso Ups Ismael Iram Manzano Bonilla PDFDocumento4 páginasTarea 1 Caso Ups Ismael Iram Manzano Bonilla PDFJhamilAún no hay calificaciones
- Diseño de WebappsDocumento5 páginasDiseño de WebappsBryan Rosas Tello100% (1)
- Asimov, Isaac - Fundacion 1 - Preludio A La Fundacion (1988)Documento205 páginasAsimov, Isaac - Fundacion 1 - Preludio A La Fundacion (1988)pedrolmo100% (4)
- Control Digital de Velocidad de Un Motor DCDocumento16 páginasControl Digital de Velocidad de Un Motor DCBeatrizMontesAún no hay calificaciones
- Control Digital de Velocidad de Un Motor DCDocumento16 páginasControl Digital de Velocidad de Un Motor DCLuis Enrique Zapata Valenzuela100% (1)
- Control de Velocidad de Un Motor DC Mediante Lógica BorrosaDocumento9 páginasControl de Velocidad de Un Motor DC Mediante Lógica BorrosaFerdy Casaverde LopezAún no hay calificaciones
- Control de Motores Servos Usando Matlab y Un Pic16f628aDocumento10 páginasControl de Motores Servos Usando Matlab y Un Pic16f628aCristian Moya BejaranoAún no hay calificaciones
- Controlando Un Servomotor Con Un Pic16f877Documento7 páginasControlando Un Servomotor Con Un Pic16f877Jules AgAún no hay calificaciones
- Practica 1 ModuloDocumento4 páginasPractica 1 ModuloDnlUrgilesAún no hay calificaciones
- Tarea 2 - Juan Pablo Fernández Temoltzin - Movimientos Basicos RobotDocumento42 páginasTarea 2 - Juan Pablo Fernández Temoltzin - Movimientos Basicos RobotJuan Pablo FernándezAún no hay calificaciones
- Lab Sem 5 Control de Motor MPAP UnipolarDocumento8 páginasLab Sem 5 Control de Motor MPAP Unipolarwilliam coronadoAún no hay calificaciones
- Uso Del PWMDocumento42 páginasUso Del PWMJose Ruben TorresHortaAún no hay calificaciones
- SimilarDocumento11 páginasSimilarPierDonneeAún no hay calificaciones
- Control de DirecciónDocumento7 páginasControl de DirecciónAbraham RodriguezAún no hay calificaciones
- Servo y MCCDocumento14 páginasServo y MCCManuel DaniloAún no hay calificaciones
- Controlador PidDocumento15 páginasControlador Pid18037055480% (1)
- PPI InformeDocumento14 páginasPPI InformeRonald SandovalAún no hay calificaciones
- HL293DDocumento15 páginasHL293DRosio Evaristo VivarAún no hay calificaciones
- PWM On The ATmega328Documento14 páginasPWM On The ATmega328Miguel Ángel Murillo RamírezAún no hay calificaciones
- Cny70 y MasDocumento12 páginasCny70 y MasDavid NuñezAún no hay calificaciones
- Algoritmo Pid VelocistaDocumento13 páginasAlgoritmo Pid VelocistaNico PerezAún no hay calificaciones
- Lab#7 - PWMDocumento11 páginasLab#7 - PWMDenzel Vega NoeAún no hay calificaciones
- Reporte de Seguidor de LineaDocumento10 páginasReporte de Seguidor de LineaRaymond KenneyAún no hay calificaciones
- LAB 2 Arduino PDFDocumento6 páginasLAB 2 Arduino PDFMarco Antonio Yupanqui LimachiAún no hay calificaciones
- Practica Motores Con ArduinoDocumento10 páginasPractica Motores Con ArduinoAngeles Rguez CardenesAún no hay calificaciones
- Control de Servomotor Mediante Un DsPICDocumento4 páginasControl de Servomotor Mediante Un DsPICpicknick1966Aún no hay calificaciones
- Control de Temperatura Con PWN Usando PICDocumento14 páginasControl de Temperatura Con PWN Usando PICPamela Rodriguez RodriguezAún no hay calificaciones
- Control PIDDocumento10 páginasControl PIDsagaprimeAún no hay calificaciones
- Servo Drive SVL 2100Documento9 páginasServo Drive SVL 2100Cristian Moya BejaranoAún no hay calificaciones
- Cálculo Del PWMDocumento3 páginasCálculo Del PWMprofe321Aún no hay calificaciones
- Acciones Básicas de Sistemas de ControlDocumento25 páginasAcciones Básicas de Sistemas de ControlRalph MarietteAún no hay calificaciones
- Control de Motor EncoderDocumento29 páginasControl de Motor Encodercymonso100% (15)
- Control de Posicion de Un Balancin Con ADocumento6 páginasControl de Posicion de Un Balancin Con AMiguel El BarbaroAún no hay calificaciones
- PWM - (Modulación Por Ancho de Pulso)Documento8 páginasPWM - (Modulación Por Ancho de Pulso)Anonymous eoHkkVmoINAún no hay calificaciones
- Uso y Manejo de MotoresDocumento6 páginasUso y Manejo de MotoresEdwin Javier Garavito HernándezAún no hay calificaciones
- Nacho Perez - Conclusiones-Controlador Eléctronico Giro Del MotorDocumento8 páginasNacho Perez - Conclusiones-Controlador Eléctronico Giro Del MotorNacho PerezAún no hay calificaciones
- Trabajo Práctico ServomotorDocumento8 páginasTrabajo Práctico Servomotorabril.maidAún no hay calificaciones
- Automatizacion Del Transporte de Carga - Luis Fernando Vargas CandiaDocumento21 páginasAutomatizacion Del Transporte de Carga - Luis Fernando Vargas Candialuisvargasc66Aún no hay calificaciones
- Quiz 5christian Ricardo Resendiz 159669Documento5 páginasQuiz 5christian Ricardo Resendiz 159669Cristian LopezzAún no hay calificaciones
- Pto MpapDocumento8 páginasPto MpapEmanuel López LAún no hay calificaciones
- Practica 7Documento11 páginasPractica 7Isaac Tonatiuh Ayala PérezAún no hay calificaciones
- Señales PWMDocumento13 páginasSeñales PWMJesús Robles EscobarAún no hay calificaciones
- Practca 3 BuenoDocumento15 páginasPractca 3 BuenoMax AlvarezAún no hay calificaciones
- Simulink y MatlabDocumento16 páginasSimulink y MatlabSamuel Granados MejíaAún no hay calificaciones
- Practica 1Documento3 páginasPractica 1DnlUrgilesAún no hay calificaciones
- Algoritmo Pid para Seguidor LinhaDocumento1 páginaAlgoritmo Pid para Seguidor LinhaFelipe Apaza100% (1)
- CTM Ejemplo - Control PID Del Modelo Del Péndulo Invertido PDFDocumento8 páginasCTM Ejemplo - Control PID Del Modelo Del Péndulo Invertido PDFWilson Barco MAún no hay calificaciones
- PWM - (Ancho Por Modulación de Pulso) : CompararDocumento11 páginasPWM - (Ancho Por Modulación de Pulso) : CompararAdrianMartinezMendezAún no hay calificaciones
- CONTROL PID APLICADO SOBRE Variador Con Tia Portal 11 PDFDocumento6 páginasCONTROL PID APLICADO SOBRE Variador Con Tia Portal 11 PDFbenditasea3352Aún no hay calificaciones
- Villegas Gonzalez Practica2Documento6 páginasVillegas Gonzalez Practica2Germán VillegasAún no hay calificaciones
- Informe Control Practica5Documento16 páginasInforme Control Practica5Andrew Israel QAún no hay calificaciones
- p5 SsanchezDocumento15 páginasp5 SsanchezSebastian Sanchez MacasAún no hay calificaciones
- Practica Puente H V2Documento10 páginasPractica Puente H V2Jonathan DelgadoAún no hay calificaciones
- Control Ejercicios de PidDocumento66 páginasControl Ejercicios de PidMundoPic MundoPicAún no hay calificaciones
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109De EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Aún no hay calificaciones
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 5 de 5 estrellas5/5 (2)
- UF1253 - Diagnóstico de deformaciones estructuralesDe EverandUF1253 - Diagnóstico de deformaciones estructuralesAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Filtro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoDe EverandFiltro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoAún no hay calificaciones
- Corrección gamma: Mejora de la claridad visual en la visión por computadora: la técnica de corrección gammaDe EverandCorrección gamma: Mejora de la claridad visual en la visión por computadora: la técnica de corrección gammaAún no hay calificaciones
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoDe EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoCalificación: 4 de 5 estrellas4/5 (4)
- Montaje de instalaciones automatizadas. ELEE0109De EverandMontaje de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- Análisis en El Desarrollo Del Software - Víctor Domínguez MirónDocumento124 páginasAnálisis en El Desarrollo Del Software - Víctor Domínguez MirónVictor Hugo Zamalloa BarreraAún no hay calificaciones
- Calculo Vectorial - Washington ArmasDocumento295 páginasCalculo Vectorial - Washington ArmasGuillermoManAún no hay calificaciones
- Circuito Integrado AS15-F en Las Tarjetas T-CONDocumento1 páginaCircuito Integrado AS15-F en Las Tarjetas T-CONVictor Hugo Zamalloa BarreraAún no hay calificaciones
- Desarrollo Proyectos Informaticos Con JavaDocumento269 páginasDesarrollo Proyectos Informaticos Con JavaMatias RosonAún no hay calificaciones
- Invertir El Giro de Un Motor de CD Con El l293b o l293dDocumento4 páginasInvertir El Giro de Un Motor de CD Con El l293b o l293dVictor Hugo Zamalloa BarreraAún no hay calificaciones
- T NavigatorDocumento4 páginasT NavigatorJunior CedeñoAún no hay calificaciones
- Escuela de Egb Fiscal Mixta John F KennedyDocumento11 páginasEscuela de Egb Fiscal Mixta John F KennedyMayrita AlbanAún no hay calificaciones
- PatronesDocumento10 páginasPatronesAlvaro José Julio BeltranAún no hay calificaciones
- Resumen LIBRO Scrum BookDocumento9 páginasResumen LIBRO Scrum BookSara EsTher GuevaraAún no hay calificaciones
- Manual Del Administrador SharepointDocumento14 páginasManual Del Administrador SharepointMatias FernandezAún no hay calificaciones
- Comunicación DescendenteDocumento3 páginasComunicación Descendenteley_flowerAún no hay calificaciones
- Formato Check ListDocumento3 páginasFormato Check ListAleex LaraaAún no hay calificaciones
- PytonDocumento30 páginasPytonKeyla Cordova100% (2)
- FodaDocumento5 páginasFodaKeith Aymé100% (1)
- Certificacionticdocentes ULADECHDocumento29 páginasCertificacionticdocentes ULADECHDanndy DCAún no hay calificaciones
- Taller 2Documento6 páginasTaller 2Khen LvAún no hay calificaciones
- AA1 Ev1 Desarrollo Del Cuestionario Infraestructura Tecnologica de La OrganizacionDocumento6 páginasAA1 Ev1 Desarrollo Del Cuestionario Infraestructura Tecnologica de La OrganizacionJuan Diego LozanoAún no hay calificaciones
- 3 Conceptos Básicos de La ComputadoraDocumento6 páginas3 Conceptos Básicos de La ComputadoraEdna Paola Chavez GuerraAún no hay calificaciones
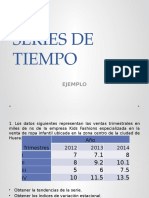
- Series de TiempoDocumento18 páginasSeries de TiempoJhonerValdezValdivianoAún no hay calificaciones
- Sistemas Integrados Gestión - Semana 9Documento17 páginasSistemas Integrados Gestión - Semana 9Ana Cecilia Rimac LeonAún no hay calificaciones
- Unidad 2. SaberDocumento6 páginasUnidad 2. SaberFreedy Martinez MedinaAún no hay calificaciones
- Aplicaciones de FEM PDFDocumento154 páginasAplicaciones de FEM PDFElliott M.Aún no hay calificaciones
- Seminario de Amway - Ventaja CompetitivaDocumento2 páginasSeminario de Amway - Ventaja Competitivawilly9380Aún no hay calificaciones
- Plantilla Matriz de VesterDocumento6 páginasPlantilla Matriz de VesterJosé IspilcoAún no hay calificaciones
- Interrupciones Con ArduinoDocumento18 páginasInterrupciones Con ArduinoDaniel TorresAún no hay calificaciones
- Manual Notebook PDFDocumento18 páginasManual Notebook PDFLuchiio100% (1)
- 06 Security Honig NIMS Exam SpanishDocumento4 páginas06 Security Honig NIMS Exam Spanishskullmag83Aún no hay calificaciones
- PracticaDocumento9 páginasPracticarobyn100Aún no hay calificaciones
- Como Arrancar Un CD Live en Bios UEFI FacilDocumento4 páginasComo Arrancar Un CD Live en Bios UEFI FacilJose Angel Romero RodriguezAún no hay calificaciones
- Transacciones, Triggers, ExcepcionesDocumento3 páginasTransacciones, Triggers, ExcepcionesCarlosMAAún no hay calificaciones