También podría gustarte
- 100 Circuitos de Audio (ES) - volume 1De Everand100 Circuitos de Audio (ES) - volume 1Calificación: 5 de 5 estrellas5/5 (2)
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- Electronica Industrial - Timothy J. MaloneyDocumento590 páginasElectronica Industrial - Timothy J. MaloneyMarvin Caballero ZelayaAún no hay calificaciones
- ProyectoFinal César Díaz, 9 749 2475Documento5 páginasProyectoFinal César Díaz, 9 749 2475César D. MarioAún no hay calificaciones
- Laboratorio # 8 - Características Reales de Los Amplificadores OperacionalesDocumento8 páginasLaboratorio # 8 - Características Reales de Los Amplificadores OperacionalesGEAN CARLO RODRIGUEZ ROAAún no hay calificaciones
- PRACTICA 9 Control de Fase DM 2020BDocumento9 páginasPRACTICA 9 Control de Fase DM 2020BAdolfo Rojas ArellanoAún no hay calificaciones
- Ejercicio y Formulario Dispositivos Electronicos PDFDocumento7 páginasEjercicio y Formulario Dispositivos Electronicos PDFJulio Cesar Olan LorenzoAún no hay calificaciones
- Laboratorio3 MEDIDA DE LA IMPEDANCIADocumento26 páginasLaboratorio3 MEDIDA DE LA IMPEDANCIAxd S:Aún no hay calificaciones
- Practica 5 Ruben Yagual PDFDocumento20 páginasPractica 5 Ruben Yagual PDFreysAún no hay calificaciones
- Experimento de inducción electromagnéticaDocumento9 páginasExperimento de inducción electromagnéticaRoberto Leon0% (1)
- TEOREMASDocumento15 páginasTEOREMASEdgar NavaAún no hay calificaciones
- RLC circuit impedance and currentDocumento1 páginaRLC circuit impedance and currentDiego Yesid100% (1)
- Exposicion TriacDocumento12 páginasExposicion TriacGael Pelagio RamirezAún no hay calificaciones
- Practica 2 CaracterizacionDocumento6 páginasPractica 2 CaracterizacionAndres Pinilla TorresAún no hay calificaciones
- Reporte de ServomotoresDocumento7 páginasReporte de ServomotoresRubens GarciaAún no hay calificaciones
- Divisores de TensionDocumento5 páginasDivisores de TensionEly DueñasAún no hay calificaciones
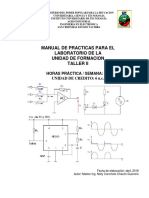
- Guia de Practicas Taller II Abril 2016Documento82 páginasGuia de Practicas Taller II Abril 2016AAún no hay calificaciones
- Problemas de Calculo de Demandas y Conductores 1Documento2 páginasProblemas de Calculo de Demandas y Conductores 1Eliseo SerranoAún no hay calificaciones
- Amplificador DarlingtonDocumento10 páginasAmplificador DarlingtonVlad TepesAún no hay calificaciones
- Guia 2-Respuesta en El Tiempo de Circuitos RLCDocumento5 páginasGuia 2-Respuesta en El Tiempo de Circuitos RLCsaracuervoaldanaAún no hay calificaciones
- Transistores FET - Amplificadores y simulaciones en LTSPICEDocumento7 páginasTransistores FET - Amplificadores y simulaciones en LTSPICELenin LlumiquingaAún no hay calificaciones
- Laboratorio 2 - OrCadDocumento10 páginasLaboratorio 2 - OrCadAndres GomezAún no hay calificaciones
- Lab Sistemas MIcroprocesados Practica7 2017ADocumento4 páginasLab Sistemas MIcroprocesados Practica7 2017ADiego ValdiviezoAún no hay calificaciones
- Sistemas de medición y elementos finales de controlDocumento428 páginasSistemas de medición y elementos finales de controlAlexis ArellanoAún no hay calificaciones
- Compuertas Lógicas DTL y TTLDocumento11 páginasCompuertas Lógicas DTL y TTLFreddy Garcia100% (1)
- Capítulo 1 - Resonancia y Lugares Geométricos PDFDocumento82 páginasCapítulo 1 - Resonancia y Lugares Geométricos PDFXavi Chérrez RodasAún no hay calificaciones
- Informe Laboratorio Transistores Fni 2019Documento6 páginasInforme Laboratorio Transistores Fni 2019Daniel Rodrigo Lopez PillcoAún no hay calificaciones
- Circuito de Control de Un SCR y Un Triac Con Un DiaccDocumento3 páginasCircuito de Control de Un SCR y Un Triac Con Un DiaccJ̶ S̶t̶i̶c̶k̶ ̶h̶e̶r̶r̶e̶r̶a̶ ̶m̶a̶n̶r̶i̶q̶u̶e̶Aún no hay calificaciones
- Formulas MicrocintasDocumento2 páginasFormulas MicrocintasAlex SantamariaAún no hay calificaciones
- TroceadoresDocumento20 páginasTroceadoresElItaiAún no hay calificaciones
- Diodo ImpattDocumento7 páginasDiodo ImpattAngel RocabadoAún no hay calificaciones
- Fuentes Line A Les Ycon Mutada SDocumento29 páginasFuentes Line A Les Ycon Mutada SAlex EspinozaAún no hay calificaciones
- Fototiristores (Lascr)Documento5 páginasFototiristores (Lascr)dbj60885Aún no hay calificaciones
- TMS 1000Documento13 páginasTMS 1000Agustin Martinez PerezAún no hay calificaciones
- Configuracion ADC PIC16F887Documento8 páginasConfiguracion ADC PIC16F887Gabriel OrtizAún no hay calificaciones
- Amplificadores de Bajo Ruido BF998Documento16 páginasAmplificadores de Bajo Ruido BF998jpciafar100% (1)
- Interruptor Electronico Con FotoceldaDocumento7 páginasInterruptor Electronico Con FotoceldaDuván Ricardo GuzmánAún no hay calificaciones
- Practica 7 Diodo ResueltaDocumento5 páginasPractica 7 Diodo Resueltajaime gandara100% (1)
- Multiplexación Displays 7 Segmentos Con Arduino.Documento8 páginasMultiplexación Displays 7 Segmentos Con Arduino.johan dominguez100% (1)
- Simulación de PulsosDocumento7 páginasSimulación de PulsosIvan David Oñate ContrerasAún no hay calificaciones
- Taller Inductancia PDFDocumento2 páginasTaller Inductancia PDFWilmerAún no hay calificaciones
- Aplicaciones SCR y TriacDocumento16 páginasAplicaciones SCR y Triacalejandro cardenasAún no hay calificaciones
- P04 Grabacion Del Codigo Bootloader USB ICSPDocumento15 páginasP04 Grabacion Del Codigo Bootloader USB ICSPBrayam MirandaAún no hay calificaciones
- Lab4 Conmutacion Natural y ForzadaDocumento3 páginasLab4 Conmutacion Natural y ForzadaErick Jimenez100% (1)
- JERKDocumento4 páginasJERKDavid BravoAún no hay calificaciones
- Programación en Lenguaje Ensamblador (Atmel Studio)Documento64 páginasProgramación en Lenguaje Ensamblador (Atmel Studio)Marco A. Tristan0% (1)
- Filtro Sallen-Key de 2do ordenDocumento10 páginasFiltro Sallen-Key de 2do ordenMiguel GonzálezAún no hay calificaciones
- El Transistor Como InterruptorDocumento4 páginasEl Transistor Como InterruptorAlejandra Gallego GonzalezAún no hay calificaciones
- Circuito Lógico Encargado de Controlar LaDocumento13 páginasCircuito Lógico Encargado de Controlar Lajj_adame100% (2)
- Vatimetro Varimetro y CofimetroDocumento9 páginasVatimetro Varimetro y CofimetroRoy ZamoraAún no hay calificaciones
- Osciladores Mono Estable y Astables, Ejercicios ResueltosDocumento5 páginasOsciladores Mono Estable y Astables, Ejercicios ResueltosElectronica TelecomunicacionesAún no hay calificaciones
- Lampara IncandescenteDocumento5 páginasLampara IncandescenteJose AnguloAún no hay calificaciones
- Foto TriacDocumento4 páginasFoto TriacReyes Benitez LuisAún no hay calificaciones
- Laboratorio Diodos y Transistores Como Interruptor (Switch) y AmplificadorDocumento8 páginasLaboratorio Diodos y Transistores Como Interruptor (Switch) y AmplificadorAndres JoseAún no hay calificaciones
- UNJFSC-L4 - Electricidad Industrial 080920Documento5 páginasUNJFSC-L4 - Electricidad Industrial 080920angel sarmiento zarzosa100% (1)
- Criterio de JuryDocumento11 páginasCriterio de JuryJozeph NeirAún no hay calificaciones
- Cambiador de VozDocumento8 páginasCambiador de VozOrlando AlfaroAún no hay calificaciones
- Cambiador de voz digitalDocumento6 páginasCambiador de voz digitalISMAEL ENRIQUE VALENCIA JURADOAún no hay calificaciones
- Circuitos IntegradosDocumento3 páginasCircuitos IntegradosShadid ThomasAún no hay calificaciones
- Circuitos electrónicos para detectar humedad y ahuyentar roedoresDocumento53 páginasCircuitos electrónicos para detectar humedad y ahuyentar roedoresMark LMAún no hay calificaciones
- Glosario ItilDocumento29 páginasGlosario Itiljohsttin curahua100% (2)
- 01 - Operaciones - AS400Documento24 páginas01 - Operaciones - AS400Henry DiazAún no hay calificaciones
- Manual LiberarespacioDocumento4 páginasManual LiberarespacioHenry DiazAún no hay calificaciones
- Formateo de Disco A Bajo Nivel Con HDD Low Level FormatDocumento4 páginasFormateo de Disco A Bajo Nivel Con HDD Low Level FormatHenry DiazAún no hay calificaciones
- Como Instalar Mi Correo Lotus en OtroDocumento5 páginasComo Instalar Mi Correo Lotus en OtroHenry DiazAún no hay calificaciones
- Manual One DriveDocumento31 páginasManual One DriveLe DeuxAún no hay calificaciones
- Planta ExternaDocumento44 páginasPlanta ExternaAaron Ulises Bautista LaraAún no hay calificaciones
- P - MBA - Master en Alta Dirección de Empresas+TurismoDocumento13 páginasP - MBA - Master en Alta Dirección de Empresas+TurismoHenry DiazAún no hay calificaciones
- Planta ExternaDocumento44 páginasPlanta ExternaAaron Ulises Bautista LaraAún no hay calificaciones
- Informe FinalDocumento3 páginasInforme FinalHenry DiazAún no hay calificaciones
- Planta ExternaDocumento44 páginasPlanta ExternaAaron Ulises Bautista LaraAún no hay calificaciones
- El CCSM y la renovación de la CasonaDocumento9 páginasEl CCSM y la renovación de la CasonaHenry DiazAún no hay calificaciones
- Tarea 2 Dig2Documento23 páginasTarea 2 Dig2Henry DiazAún no hay calificaciones
- Tutorial Bolsa de Practicas CibertecDocumento29 páginasTutorial Bolsa de Practicas CibertecHenry DiazAún no hay calificaciones
- Todo Sobre Los DbsDocumento35 páginasTodo Sobre Los DbsOscar MataAún no hay calificaciones
- Actividad Primera UnidadDocumento3 páginasActividad Primera UnidadHenry DiazAún no hay calificaciones
- Guia de Acceso A La Plataforma Cambridge para Estudiantes de Touchstone ...Documento4 páginasGuia de Acceso A La Plataforma Cambridge para Estudiantes de Touchstone ...Henry DiazAún no hay calificaciones
- Amplificador DiferencialDocumento11 páginasAmplificador DiferencialHenry DiazAún no hay calificaciones
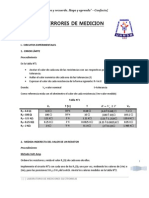
- Errores de MedicionDocumento10 páginasErrores de MedicionHenry DiazAún no hay calificaciones
- Sistema de Audio ProfesionalDocumento8 páginasSistema de Audio ProfesionalHenry DiazAún no hay calificaciones
- Clase 1-Introduccion Redes InalámbricasDocumento39 páginasClase 1-Introduccion Redes InalámbricasHenry DiazAún no hay calificaciones
- HandbookDocumento99 páginasHandbookHenry DiazAún no hay calificaciones
- Amplificador DiferencialDocumento11 páginasAmplificador DiferencialHenry DiazAún no hay calificaciones