También podría gustarte
- Estrategia Oceano Azul - Crear en El Mercado Espacios No DisputadosDocumento8 páginasEstrategia Oceano Azul - Crear en El Mercado Espacios No DisputadosDanny Grisales100% (1)
- Evaluación de Riesgo PRO-SSO-001Documento20 páginasEvaluación de Riesgo PRO-SSO-001José AleAún no hay calificaciones
- Historia de La Aviación Española PDFDocumento85 páginasHistoria de La Aviación Española PDFJuan Navarro Fernández67% (3)
- Texto - Informatica Aplicada A La Administracion IIDocumento153 páginasTexto - Informatica Aplicada A La Administracion IISteward Ayala SernaqueAún no hay calificaciones
- NRF-164-PEMEX-2006 - ManómetrosDocumento23 páginasNRF-164-PEMEX-2006 - ManómetrosAdan AlbertoAún no hay calificaciones
- Informe Del Paso A Paso para La Recepcion o RadicacionDocumento6 páginasInforme Del Paso A Paso para La Recepcion o RadicacionLUZ ELENA REALPE CERONAún no hay calificaciones
- Analisis de FiabilidadDocumento5 páginasAnalisis de FiabilidadRobert HernanAún no hay calificaciones
- Friedl (2017) Las Distorsiones Cognitivas en Los Trastornos PsicológicosDocumento169 páginasFriedl (2017) Las Distorsiones Cognitivas en Los Trastornos PsicológicosOrnella BrunaAún no hay calificaciones
- Informe n1-2Documento7 páginasInforme n1-2Veronica Maldonado VasquezAún no hay calificaciones
- Por Qué Se Hacen Estas PlanificacionesDocumento1 páginaPor Qué Se Hacen Estas PlanificacionesVeronica Maldonado VasquezAún no hay calificaciones
- Cuenca Sama Centros PobladosDocumento1 páginaCuenca Sama Centros PobladosVeronica Maldonado VasquezAún no hay calificaciones
- Uso de Suelos para La Agricultura en Los Distritos de TacnaDocumento19 páginasUso de Suelos para La Agricultura en Los Distritos de TacnaVeronica Maldonado VasquezAún no hay calificaciones
- Cuenca SamaDocumento1 páginaCuenca SamaVeronica Maldonado Vasquez100% (1)
- Informe 2 UiiDocumento6 páginasInforme 2 UiiVeronica Maldonado VasquezAún no hay calificaciones
- Laboratorio de Ssuelos BioDocumento6 páginasLaboratorio de Ssuelos BioVeronica Maldonado VasquezAún no hay calificaciones
- Informe n1-2Documento7 páginasInforme n1-2Veronica Maldonado VasquezAún no hay calificaciones
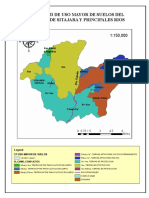
- CP Uso Mayor SitajaraDocumento1 páginaCP Uso Mayor SitajaraVeronica Maldonado VasquezAún no hay calificaciones
- ListadoDocumento1 páginaListadoVeronica Maldonado VasquezAún no hay calificaciones
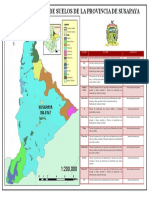
- cpsSUELO SUSAPAYADocumento1 páginacpsSUELO SUSAPAYAVeronica Maldonado VasquezAún no hay calificaciones
- Diptico CuencasDocumento3 páginasDiptico CuencasVeronica Maldonado Vasquez0% (1)
- CP Uso Mayor SitajaraDocumento1 páginaCP Uso Mayor SitajaraVeronica Maldonado VasquezAún no hay calificaciones
- Diptico CuencasDocumento3 páginasDiptico CuencasVeronica Maldonado Vasquez0% (1)
- Lodos Limpieza de PozoDocumento9 páginasLodos Limpieza de PozoVeronica Maldonado VasquezAún no hay calificaciones
- Presentación 1Documento6 páginasPresentación 1Veronica Maldonado VasquezAún no hay calificaciones
- Dinamica de RiosDocumento8 páginasDinamica de RiosVeronica Maldonado VasquezAún no hay calificaciones
- U02 Propiedades de Los Fluidos 16 IDocumento17 páginasU02 Propiedades de Los Fluidos 16 IVeronica Maldonado VasquezAún no hay calificaciones
- Clasificación de EnzimasDocumento4 páginasClasificación de EnzimasVeronica Maldonado VasquezAún no hay calificaciones
- Diptico CuencasDocumento3 páginasDiptico CuencasVeronica Maldonado Vasquez0% (1)
- CuencasDocumento11 páginasCuencasVeronica Maldonado VasquezAún no hay calificaciones
- Eco TurismoDocumento6 páginasEco TurismoVeronica Maldonado VasquezAún no hay calificaciones
- Resultados y DiscusiónDocumento6 páginasResultados y DiscusiónVeronica Maldonado VasquezAún no hay calificaciones
- Qué Es La MeteorologíaDocumento2 páginasQué Es La MeteorologíaVeronica Maldonado VasquezAún no hay calificaciones
- Informe de DarcyDocumento5 páginasInforme de DarcyVeronica Maldonado VasquezAún no hay calificaciones
- Quimica AnaliticaDocumento41 páginasQuimica AnaliticaVeronica Maldonado VasquezAún no hay calificaciones
- TopografíaDocumento27 páginasTopografíaVeronica Maldonado VasquezAún no hay calificaciones
- Tgs ToxicoDocumento2 páginasTgs ToxicoVeronica Maldonado VasquezAún no hay calificaciones
- Ciclos BiogeoquimicosDocumento14 páginasCiclos BiogeoquimicosVeronica Maldonado Vasquez100% (1)
- Embarrat. Patrimoni Industrial Article MiarnauDocumento20 páginasEmbarrat. Patrimoni Industrial Article MiarnausrbardesAún no hay calificaciones
- Estudio de Actitudes y Valores en Cuanto A Especies Exóticas Con Énfasis en La Iguana Verde (Iguana Iguana) en Puerto RicoDocumento17 páginasEstudio de Actitudes y Valores en Cuanto A Especies Exóticas Con Énfasis en La Iguana Verde (Iguana Iguana) en Puerto RicoPrograma BRICAún no hay calificaciones
- Ética en Las Fuerzas ArmadasDocumento22 páginasÉtica en Las Fuerzas ArmadasAndres BuesoAún no hay calificaciones
- Actividades Practicas EconomiaDocumento14 páginasActividades Practicas EconomianicogottigAún no hay calificaciones
- Tarea 5 POODocumento19 páginasTarea 5 POOJUAN DANIEL VILLATORO RODRIGUEZAún no hay calificaciones
- Concepcion Especular Del LenguajeDocumento7 páginasConcepcion Especular Del LenguajeLuis Fernando Velez CarrascoAún no hay calificaciones
- Proyecto Final Carmen y FernandaDocumento91 páginasProyecto Final Carmen y FernandaJose CermeñoAún no hay calificaciones
- Manejo Incidentes AmbientalesDocumento1 páginaManejo Incidentes AmbientalesMarco Florez100% (2)
- Reglamento de Investigacion - ResumenDocumento4 páginasReglamento de Investigacion - ResumenNuccia Montealegre AponteAún no hay calificaciones
- Trabajo de TopologiaDocumento2 páginasTrabajo de Topologiapatrick leopoldo paredes neiraAún no hay calificaciones
- Guía de Aprendizaje 5°Documento11 páginasGuía de Aprendizaje 5°Alex Cortés100% (1)
- Líneas de Investigación IntroducciónDocumento7 páginasLíneas de Investigación IntroducciónGilberto Betancur HerreraAún no hay calificaciones
- Practica Preprofesional 10-1Documento62 páginasPractica Preprofesional 10-1Miguel Vásquez VillanuevaAún no hay calificaciones
- Metodos de Predicción - Regresión LinealDocumento23 páginasMetodos de Predicción - Regresión LinealDiana Suzetty Quiroz ZeñaAún no hay calificaciones
- AlgebraDocumento21 páginasAlgebraAcademia-pre AdeuAún no hay calificaciones
- Amor Sin EscalasDocumento5 páginasAmor Sin EscalasLiseth FloresAún no hay calificaciones
- Procedimiento Formacion y Capacitacion Personal AdministrativoDocumento4 páginasProcedimiento Formacion y Capacitacion Personal AdministrativoAngel ChiroqueAún no hay calificaciones
- Observador de Estados para Un Motor DCDocumento9 páginasObservador de Estados para Un Motor DCJoseph Manuel Chamochumbi IndaraAún no hay calificaciones
- Manejo Integrado de Malesas en Areas AgricolasDocumento12 páginasManejo Integrado de Malesas en Areas Agricolaskim mAún no hay calificaciones
- 07 - Presiometro de MenardDocumento21 páginas07 - Presiometro de Menardmaria DiazAún no hay calificaciones
- Cartilla PDFDocumento11 páginasCartilla PDFangela perezAún no hay calificaciones
- Word de Capa de TrasnporteDocumento6 páginasWord de Capa de TrasnporteAnonymous Qg5iRZ1L5Aún no hay calificaciones