También podría gustarte
- PP PLC 003 v1.0 PLC Mitsubishi - Programacion SFCDocumento17 páginasPP PLC 003 v1.0 PLC Mitsubishi - Programacion SFCRicardo Pelao LetelierAún no hay calificaciones
- Usb Con Pic18f4550 y Labview - Rev 2012Documento18 páginasUsb Con Pic18f4550 y Labview - Rev 2012Maicol Javier D M80% (5)
- Práctica-2 Digitales 2Documento4 páginasPráctica-2 Digitales 2Juan MurilloAún no hay calificaciones
- EC2112 - Clase 4 - Mapas de KarnaughDocumento40 páginasEC2112 - Clase 4 - Mapas de KarnaughCharly A. Chura AnahuaAún no hay calificaciones
- Tutorial ATmegaDocumento17 páginasTutorial ATmegajubjub92Aún no hay calificaciones
- P01 IDE MikroC Edicion Compilacion Simulacion y Depuracion de Un ProgramaDocumento15 páginasP01 IDE MikroC Edicion Compilacion Simulacion y Depuracion de Un ProgramaaLciLAún no hay calificaciones
- Puerto ParaleloDocumento6 páginasPuerto ParaleloAndrés A. PavónAún no hay calificaciones
- Parte 2 Cap 1 PresentaDocumento23 páginasParte 2 Cap 1 PresentaEnrique Julian ConchaAún no hay calificaciones
- Memorias (Microcontroladores)Documento8 páginasMemorias (Microcontroladores)YakcoldAún no hay calificaciones
- Compilador PICC HitechDocumento94 páginasCompilador PICC HitechAndres Raul Bruno SaraviaAún no hay calificaciones
- P04 Arrancador Serial Mikrobootloader PIC18F4550 PDFDocumento6 páginasP04 Arrancador Serial Mikrobootloader PIC18F4550 PDFJhonattan PortugalAún no hay calificaciones
- Manual XilinxDocumento15 páginasManual XilinxPakitoCachorrosAún no hay calificaciones
- Reloj Digital Con PicDocumento9 páginasReloj Digital Con PicIvanmcxAún no hay calificaciones
- PreP05 Comunicacion USB PC VB y PIC18F4550 MikroCDocumento2 páginasPreP05 Comunicacion USB PC VB y PIC18F4550 MikroCxoroger100% (1)
- Electronica Diagramas Circuitos - Cargador para Baterías NiMH de FloteDocumento2 páginasElectronica Diagramas Circuitos - Cargador para Baterías NiMH de FloteCarlos RamosAún no hay calificaciones
- Programando PICs CCS 01 PDFDocumento7 páginasProgramando PICs CCS 01 PDFFrancisco Javier Galvan RojasAún no hay calificaciones
- Tutorial Proton Parte 2Documento10 páginasTutorial Proton Parte 2HectorLopezAún no hay calificaciones
- Manual HFK 010uDocumento10 páginasManual HFK 010ujonathanAún no hay calificaciones
- Introducción A Los PLCDocumento26 páginasIntroducción A Los PLCmmorales44Aún no hay calificaciones
- Ejercicios ASEMBLERDocumento10 páginasEjercicios ASEMBLERMichel Castillo CaballeroAún no hay calificaciones
- Proton IdeDocumento33 páginasProton IdePiscoya Sánchez JavierAún no hay calificaciones
- Tutorial Del MPLABDocumento23 páginasTutorial Del MPLABapi-27535945100% (3)
- P05 Programacion en MikroBasicDocumento9 páginasP05 Programacion en MikroBasicRicardo NarvaezAún no hay calificaciones
- Contadores MonolíticosDocumento15 páginasContadores MonolíticosJean Carlo ArrietaAún no hay calificaciones
- GLCDDocumento3 páginasGLCDChristian CanchigniaAún no hay calificaciones
- Mplab c18 Desde CeroDocumento59 páginasMplab c18 Desde Ceromicochango0% (1)
- Fundamentos - de - Programacion 8086Documento22 páginasFundamentos - de - Programacion 8086Hossmell VelascoAún no hay calificaciones
- Receptor de Señal IR Con PCDocumento10 páginasReceptor de Señal IR Con PCCarlos A. Galeano A.100% (1)
- TEMA - 4 Mi Primer Proyecto en PIC CDocumento18 páginasTEMA - 4 Mi Primer Proyecto en PIC Canon_691946022Aún no hay calificaciones
- Practicas Del Libro en ProteusDocumento22 páginasPracticas Del Libro en ProteusAdrian Santiago SegoviaAún no hay calificaciones
- Curso CX8-v6Documento71 páginasCurso CX8-v6Sky BlackAún no hay calificaciones
- Tema - 7 Funciones en CCS PDFDocumento38 páginasTema - 7 Funciones en CCS PDFAJ SotoAún no hay calificaciones
- Manual de Manejo de MikrocDocumento42 páginasManual de Manejo de MikrocSuriel Salazar TrejoAún no hay calificaciones
- Lectura de Teclado Con Pic 18f4550 AssemblerDocumento6 páginasLectura de Teclado Con Pic 18f4550 AssemblerDigby CastilloAún no hay calificaciones
- T Lab #03. Laboratorio Diseño Digital - 030218Documento34 páginasT Lab #03. Laboratorio Diseño Digital - 030218luis carrasquelAún no hay calificaciones
- Temporizadores, Decodificador, Codificador PDFDocumento10 páginasTemporizadores, Decodificador, Codificador PDFHOLA SOYGOKUAún no hay calificaciones
- Ccs Protocolo SpiDocumento29 páginasCcs Protocolo SpiMario Andres Caceres Nocera0% (1)
- Tutorial Soft ESP32Documento15 páginasTutorial Soft ESP32cynthiAún no hay calificaciones
- Microcontroladores MKT - Unidad IIDocumento101 páginasMicrocontroladores MKT - Unidad IIJavier VillalobosAún no hay calificaciones
- 2 - Intro A C MircosDocumento29 páginas2 - Intro A C MircosTatiana Ximena ParraAún no hay calificaciones
- Programación en C - Instrucciones de ControlDocumento7 páginasProgramación en C - Instrucciones de ControlEduardo ErnestoAún no hay calificaciones
- Algoritmos BreveDocumento9 páginasAlgoritmos BreveJorgePerezAún no hay calificaciones
- Guia LenguajeCDocumento8 páginasGuia LenguajeCKaRito Chacha JaraAún no hay calificaciones
- 10 Introduccion Al Lenguaje C 2 PDFDocumento43 páginas10 Introduccion Al Lenguaje C 2 PDFJuliana Castaño RojasAún no hay calificaciones
- Pract Inf n2Documento8 páginasPract Inf n209876654Aún no hay calificaciones
- LIBRERIAS Más Importantes en C+Documento9 páginasLIBRERIAS Más Importantes en C+Franyelis DiazAún no hay calificaciones
- Clase03 - Estructuras de ControlDocumento34 páginasClase03 - Estructuras de ControlJosue Israel MendozaAún no hay calificaciones
- Fundamentos de Lenguaje C para PICsDocumento0 páginasFundamentos de Lenguaje C para PICssaulin1965Aún no hay calificaciones
- Presentacion C para DSPICDocumento34 páginasPresentacion C para DSPICJhonny BeeAún no hay calificaciones
- Introduccion - Programacion PIC en Lenguaje C Parte1 PDFDocumento55 páginasIntroduccion - Programacion PIC en Lenguaje C Parte1 PDFSonja Maynard100% (1)
- Guia 6Documento9 páginasGuia 6RobisaAún no hay calificaciones
- Pic y C PDFDocumento101 páginasPic y C PDFAlvaro Hernán Alarcón López33% (3)
- Guia 5Documento12 páginasGuia 5JC CVAún no hay calificaciones
- Microcontroladores C 003Documento21 páginasMicrocontroladores C 003Felipe Angel Ramirez AparicioAún no hay calificaciones
- Nomenclatura de Lenguaje C++Documento17 páginasNomenclatura de Lenguaje C++Juan Manuel Galindo EspinozaAún no hay calificaciones
- Estructura SWITCHDocumento8 páginasEstructura SWITCHJulianna NietoAún no hay calificaciones
- Lenguaje C para Pics Pic 18f4550 1 Lenguaje C Tipos de Datos El CompiladorDocumento44 páginasLenguaje C para Pics Pic 18f4550 1 Lenguaje C Tipos de Datos El CompiladorOmar SolanoAún no hay calificaciones
- Resumen 2Documento5 páginasResumen 2Luis VqzAún no hay calificaciones
- C++ Practica 1Documento7 páginasC++ Practica 1Alfredo Namigtle JimenezAún no hay calificaciones
- Curso Micros-2Documento110 páginasCurso Micros-2Anonymous imulArcEAún no hay calificaciones
- Metodos de Programacion de RobotsDocumento20 páginasMetodos de Programacion de RobotsDavid Shure XivAún no hay calificaciones
- Electronica Digital AlarmaDocumento6 páginasElectronica Digital AlarmaDavid Shure XivAún no hay calificaciones
- Manual Control Universal Steren Rm-7Documento44 páginasManual Control Universal Steren Rm-7Mario Martinez100% (1)
- Regulacion de Intensidad de Brillo Con Led PicDocumento7 páginasRegulacion de Intensidad de Brillo Con Led PicDavid Shure Xiv100% (1)
- TALLER 4 de 9° SubordinaciónDocumento1 páginaTALLER 4 de 9° SubordinaciónOscar Alfonso Diaz Cruz100% (1)
- Texto Instructivo Sexto GradoDocumento13 páginasTexto Instructivo Sexto GradoRochy RojasAún no hay calificaciones
- Bases para Concurso - InglesDocumento6 páginasBases para Concurso - InglesDanteCorreaHuancasAún no hay calificaciones
- Conectores Logicos - UteaDocumento15 páginasConectores Logicos - UteaYemer Villcas SalazarAún no hay calificaciones
- 1º Parcial InglesDocumento4 páginas1º Parcial InglesbrunobozAún no hay calificaciones
- Operaciones Con DecimalesDocumento5 páginasOperaciones Con DecimalesAnabel TapiaAún no hay calificaciones
- Unidad 4Documento34 páginasUnidad 4Segundo Carlos Moreira MeraAún no hay calificaciones
- Vocabulario de FrancesDocumento39 páginasVocabulario de FrancesfannebkAún no hay calificaciones
- Libros de Texto y TareasDocumento17 páginasLibros de Texto y Tareasyog sothothAún no hay calificaciones
- Desastre de Una IdeaDocumento41 páginasDesastre de Una IdeaMario CmaraAún no hay calificaciones
- Unidad 2 - Sexto GradoDocumento12 páginasUnidad 2 - Sexto GradoLucho CI100% (1)
- Sistemas de Ecuaciones y Criterios de DivisibilidadDocumento4 páginasSistemas de Ecuaciones y Criterios de DivisibilidadFrancisco GalluccioAún no hay calificaciones
- Bloque5 Lectura1 Tipos de TextosDocumento25 páginasBloque5 Lectura1 Tipos de TextoschopanalvarezAún no hay calificaciones
- Tabla 2. Aspectos Cualitativos Del Uso de La Lengua. MCER.Documento2 páginasTabla 2. Aspectos Cualitativos Del Uso de La Lengua. MCER.almav.rosasm82Aún no hay calificaciones
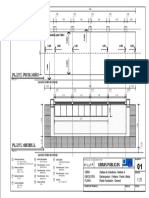
- Plano 1 - Garita ADocumento1 páginaPlano 1 - Garita AAna Laura AlvarezAún no hay calificaciones
- Narrativas 20Documento157 páginasNarrativas 20Tablet HuaweyAún no hay calificaciones
- Foro Fundamentos de La LectoescrituraDocumento3 páginasForo Fundamentos de La LectoescrituraAnna Bachs MartinAún no hay calificaciones
- Práctico 2Documento35 páginasPráctico 2candela carboneAún no hay calificaciones
- Ficha de Evaluacion PDFDocumento3 páginasFicha de Evaluacion PDFHéctor Diego Vilca Corilla100% (1)
- Temas Del CNB 2019 GuatemalaDocumento98 páginasTemas Del CNB 2019 GuatemalaWiliam Machan RavaricAún no hay calificaciones
- Subjuntivo y Condicional, ConfusionDocumento8 páginasSubjuntivo y Condicional, ConfusionpedroAún no hay calificaciones
- Maria Diaz Articulo Rev CODOLGA 8 (2011)Documento24 páginasMaria Diaz Articulo Rev CODOLGA 8 (2011)Maria DiazAún no hay calificaciones
- DislexiaDocumento8 páginasDislexiaPsic Beatriz Tejeda VAún no hay calificaciones
- Unidad Didáctica - 6°Documento22 páginasUnidad Didáctica - 6°RaulFernandoRojasParedesAún no hay calificaciones
- Que Es El LibroDocumento3 páginasQue Es El LibroroxirisAún no hay calificaciones
- Admin Linux Ubuntu FedoraDocumento58 páginasAdmin Linux Ubuntu Fedoraecu36Aún no hay calificaciones
- Diagrama de ComponentesDocumento38 páginasDiagrama de ComponentesFranklin Francisco Rosales100% (1)
- El Inconsciente Coloquio de Bonneval Ey HenryDocumento471 páginasEl Inconsciente Coloquio de Bonneval Ey HenryFRANCISCO JAVIER PIZARRO OBAID100% (1)
- Guia Preparacion Del Examen de Admision Nivel Superior 2013Documento253 páginasGuia Preparacion Del Examen de Admision Nivel Superior 2013RaúlÁlvarezM100% (2)