También podría gustarte
- Manual ATMEGA 164PDocumento16 páginasManual ATMEGA 164PFrancis SebastianAún no hay calificaciones
- Serial Peripheral InterfaceDocumento3 páginasSerial Peripheral InterfaceAndres PabonAún no hay calificaciones
- Sistemas de Comunicaciones TS01Documento12 páginasSistemas de Comunicaciones TS01Wily ChavezAún no hay calificaciones
- Curso de Protecciones Etap - Coord1Documento5 páginasCurso de Protecciones Etap - Coord1ROBERTO SUAREZAún no hay calificaciones
- DIGITALESDocumento6 páginasDIGITALESSelene Quiza TorresAún no hay calificaciones
- Definicion: Arquitectura y Organizacion de ComputadorasDocumento2 páginasDefinicion: Arquitectura y Organizacion de ComputadorasErnestoAún no hay calificaciones
- PlaneamientoDocumento4 páginasPlaneamientoNin BordonAún no hay calificaciones
- Jaula de FaradayDocumento2 páginasJaula de FaradayALEXA RUBI CISNEROS ALVAREZAún no hay calificaciones
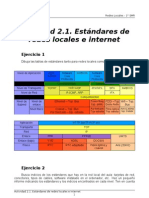
- RL - Actividad 2.1 - Estándares de Redes Locales e InternetDocumento4 páginasRL - Actividad 2.1 - Estándares de Redes Locales e InternetXx_coronil_xXAún no hay calificaciones
- Encendido Transistorizado Con ContactosDocumento2 páginasEncendido Transistorizado Con ContactoselludoAún no hay calificaciones
- Convergencia 4G AcademyDocumento78 páginasConvergencia 4G AcademyErick Obregon NavarroAún no hay calificaciones
- Fuente V R SDocumento6 páginasFuente V R Sscorpion211191Aún no hay calificaciones
- Diseño y Construccion de Un Generador UltrasonicoDocumento12 páginasDiseño y Construccion de Un Generador UltrasonicoIvànn NuñezAún no hay calificaciones
- Candado ElectrónicoDocumento14 páginasCandado ElectrónicoGuillermo Aguilar CórdovaAún no hay calificaciones
- 1.7 Amplificadores Con Jfet PDFDocumento55 páginas1.7 Amplificadores Con Jfet PDFDabidAdalbertoSalinasMenjivarAún no hay calificaciones
- Modificando La DreamcastDocumento9 páginasModificando La DreamcastEzequiel CopettiAún no hay calificaciones
- Electricidad: Laboratorio #2Documento16 páginasElectricidad: Laboratorio #2Rodrigo Pauro HinojosaAún no hay calificaciones
- Etica y Procedimientos Operativos para El Radioaficionado PDFDocumento65 páginasEtica y Procedimientos Operativos para El Radioaficionado PDFAlex TorresAún no hay calificaciones
- Experiencia N°5 Informe FinalDocumento4 páginasExperiencia N°5 Informe FinalHans HuamanAún no hay calificaciones
- Clase 2 InstrumentacionDocumento70 páginasClase 2 InstrumentacionArturo Tapia100% (2)
- Preguntas ElectroDocumento2 páginasPreguntas ElectroEdisson FernandoAún no hay calificaciones
- NM06 Actividad 1Documento1 páginaNM06 Actividad 1Yomara ValenzuelaAún no hay calificaciones
- Cuestionario Examen La Placa Base y Microprocesador - Partes 1-2-3-4 ReducidasDocumento2 páginasCuestionario Examen La Placa Base y Microprocesador - Partes 1-2-3-4 Reducidasrobertbe12100% (3)
- DNC30Documento53 páginasDNC30Herminio Gómez100% (1)
- El Osciloscopio AutomotrizDocumento6 páginasEl Osciloscopio AutomotrizAlbertoAún no hay calificaciones
- Resumen SCRDocumento11 páginasResumen SCRozielsAún no hay calificaciones
- Escorpion (Instrutivo para El Kit)Documento2 páginasEscorpion (Instrutivo para El Kit)Luis SanchezAún no hay calificaciones
- Determinación de Los Parámetros Del Circuito Equivalente Del TransformadorDocumento2 páginasDeterminación de Los Parámetros Del Circuito Equivalente Del TransformadorJulian David Prada PerezAún no hay calificaciones
- Espe Electronica ELEE 14006 CIRCUITOS-DIGITALESDocumento2 páginasEspe Electronica ELEE 14006 CIRCUITOS-DIGITALESLindsay RangelAún no hay calificaciones
- Diseño de Enlaces SatelitalesDocumento16 páginasDiseño de Enlaces Satelitalesmoussa05Aún no hay calificaciones