Documentos de Académico
Documentos de Profesional
Documentos de Cultura
7 OrdenSup PDF
Cargado por
javbuitTítulo original
Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
7 OrdenSup PDF
Cargado por
javbuitCopyright:
Formatos disponibles
Dpto.
Electrnica, Automtica e Informtica Industrial 159
7 Sistemas de orden superior
Hasta ahora slo se ha estudiado la respuesta del rgimen transitorio de los
sistemas de primer y segundo orden simples. En este captulo se pretende analizar la
evolucin temporal de sistemas de orden superior (tercero, cuarto, etc.). El
procedimiento para conseguirlo ser a travs de la adicin de los polos y ceros a una
FDT simple. No obstante, hay aspectos tericos que se han visto y que son aplicables
con independencia del grado del sistema. As, se estableci en el captulo 5 que la
estabilidad de los sistemas LTI dependen de la ubicacin de los polos de la FDT del
conjunto total (tambin denominado de la cadena cerrada si es realimentado), dentro del
dominio complejo. Adems, tambin se observ que los polos o races del polinomio
caracterstico definen la evolucin temporal del rgimen transitorio.
En este captulo, se tratar de la adicin de ceros y polos, tanto en la cadena
abierta como en cascada. Se desprender que stos tambin van a influir notablemente,
tanto en la estabilidad, as como en la evolucin temporal de la seal de salida.
Otro aspecto que se abordar ser la determinacin de los sistemas equivalentes
reducidos, esto es, la bsqueda de un modelo de menor grado que simplifique el anlisis
de los equipos. Para conseguirlo se necesitar introducir el concepto de polos
dominantes.
Captulo 7: Sistemas de orden superior Apuntes de Regulacin Automtica
160 Dpto. Electrnica, Automtica e Informtica Industrial
+
-
) ( s G
p
sT + 1
1
) (s G ( )
z
sT + 1
+
-
) ( s G
p
sT + 1
1
+
-
) ( s G
p
sT + 1
1
) (s G ( )
z
sT + 1 ) (s G ( )
z
sT + 1
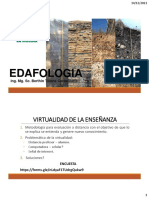
Figura 7. 1. a) Aadir un polo en la cadena abierta b) Aadir un cero en serie
7.1 Efectos de aadir polos y ceros a las funciones de
transferencia
Cuando se dice que se aade un polo o un cero en la cadena abierta, se est
haciendo referencia a que se tiene una estructura de realimentacin negativa y se est
agregando el efecto del polo o del cero en la FDT de la planta o en la realimentacin,
esto es, en G(s) o en H(s). Por eso, se dice que es en la cadena abierta, por que es la
adicin del efecto del polo o del cero cmo si se abriera el lazo de realimentacin.
En cambio, si el procesamiento del efecto aadido se hace en cascada con el
sistema total, se dice que se ha aadido un cero o un polo al conjunto total. Obsrvese
los diagramas de la figura 7.1 para diferenciar en la adicin en cadena abierta y en serie.
7.1.1 Adicin de un polo en la cadena abierta
La adicin de un polo en la cadena abierta, tiende a que el sistema en su
conjunto sea ms lento y pierda estabilidad.
Una de las formas, para llegar a esta conclusin, es a travs de las tcnicas del
lugar de las races, LDR (ver captulo 10). Estas tcnicas describen, mediante criterios
grficos, las races del polinomio caracterstico, 1+G(s)H(s)=0, a partir de la
informacin de la cadena abierta. Los resultados son los polos de la cadena cerrada y
por lo tanto definirn la estabilidad y el tipo de respuesta temporal.
Si a un sistema subamortiguado, por ejemplo el indicado en la figura 7.2, se le
aade un polo en la cadena abierta, las ramas del LDR (soluciones del conjunto cerrado
dependiente de la ganancia esttica) se orientan hacia el semiplano positivo. De este
efecto se concluye que el sistema se hace ms inestable y ms lento.
Con el fin de tener un marco de referencia idntico se va a utilizar la misma
planta piloto, facilitando la explicacin de los efectos de aadir los polos y ceros, tanto
en la cadena abierta como cerrada. Se ha elegido un modelo de segundo orden simple y
Apuntes de Regulacin Automtica Captulo 7: Sistemas de orden superior
Dpto. Electrnica, Automtica e Informtica Industrial 161
+
-
1 2
2
+
n n
s s
k
p
sT + 1
1
+
-
1 2
2
+
n n
s s
k
p
sT + 1
1
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Figura 7. 2. Efecto de aadir un polo en la cadena abierta. a) Diagrama a bloques,
b)LDR sin polo y con un polo con una constante de tiempo de 0.5s
Adicin de un polo en la cadena abierta con Tp 0, 0.5, 1, y 5 s
Tiempo (s)
A
m
p
li
t
u
d
0 5 10 15 20 25
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
T
P
=5s
T
P
=0s T
P
=0.5s T
P
=1s
Figura 7. 3. Respuesta al escaln con un polo aadiendo
en la cadena abierta
subamortiguado, con una frecuencia natural de 1 [rad/s], un factor de amortiguamiento
de 0.5 y una ganancia esttica unitaria.
Comparando los dos LDR sin y con polo aadido, figura 7.2b, se observa que a
medida de que se aumente la ganancia esttica, k, los polos dominantes del sistema con
polo aadido en la cadena abierta, se aproximan al eje imaginario, perdiendo
estabilidad. Adems, la frecuencia de amortiguamiento aumenta y disminuye la
constante de amortiguamiento de los polos dominantes. El efecto supone que el ngulo
de apertura de estos polos complejos y conjugados, se dirija hacia el semiplano positivo,
haciendo que el sistema tenga mayor sobreoscilacin hasta alcanzar la inestabilidad.
En la figura 7.3 se
contempla la respuesta ante la
entrada en escaln del conjunto
realimentado, utilizando la planta
referencia (
n
= 1,=0.5 y k=1), y
variando la constante del polo
aadido. Se observa que la
evolucin ms rpida se da cuando
no hay polo aadido, T
P
= 0s. Por
otro lado, mientras la constante del
polo aadido est ms alejado del
eje imaginario que los polos
complejos, los polos dominantes
ser complejos conjugados y con
mayor sobreoscilacin. Si se hace
elevada la constante de tiempo del
polo aadido, por ejemplo T
P
= 5s,
Captulo 7: Sistemas de orden superior Apuntes de Regulacin Automtica
162 Dpto. Electrnica, Automtica e Informtica Industrial
1 2
2
+
n n
s s
k
( )
P
sT + 1
1
1 2
2
+
n n
s s
k
( )
P
sT + 1
1
Figura 7. 4. Efecto de aadir un polo en serie
p
T
s
1
=
d
j
( ) arccos =
n
p
T
s
1
=
d
j
( ) arccos =
n
Adicin de un polo en la cadena cerrada con Tp 0, 0.5, 1, 2 y 4 s
Tiempo (s)
A
m
p
lit
u
d
0 5 10 15 20 25
0
0.2
0.4
0.6
0.8
1
1.2
1.4
T
P
=0
T
P
=4s
T
P
=2s
T
P
=0.5
T
P
=1s
Adicin de un polo en la cadena cerrada con Tp 0, 0.5, 1, 2 y 4 s
Tiempo (s)
A
m
p
lit
u
d
0 5 10 15 20 25
0
0.2
0.4
0.6
0.8
1
1.2
1.4
T
P
=0
T
P
=4s
T
P
=2s
T
P
=0.5
T
P
=1s
Figura 7. 5. Respuesta al escaln de la planta
referencia con un polo aadido en cascada
la respuesta dominante es vuelve sobreamortiguada.
7.1.2 Adicin de un polo en serie
Si se aade un polo en cascada, a medida de que aumente su constante de tiempo
asociada, T
p
, el conjunto total se volver ms lento y sobreamortiguado.
En general, los polos en serie o en cascada hacen que el sistema sea ms lento,
ya que suponen un filtro paso bajo, atenuando la respuesta del espectro de alta
frecuencia. Estas componentes frecuenciales estn relacionados con la rapidez del
sistema aunque tambin con el ruido. Por tanto, el sistema ser ms lento pero tambin
ser ms inmune a las perturbaciones.
Empleando la planta referencia
(
n
= 1,=0.5 y k=1) y al aadirle en
cascada un polo, se observa que el
sistema es ms rpido cuando no se le
agrega, T
p
=0. Si la constante de tiempo
del polo aadido aumenta, disminuir la
frecuencia de corte del filtro paso bajo,
permitiendo slo un procesamiento de la
seal de las componentes ms bajas de la
frecuencia. En el anlisis temporal
significar que tender a ser ms
sobreamortiguado y ms lento.
Apuntes de Regulacin Automtica Captulo 7: Sistemas de orden superior
Dpto. Electrnica, Automtica e Informtica Industrial 163
+
-
1 2
2
+
n n
s s
k
p
sT + 1
1
+
-
1 2
2
+
n n
s s
k
p
sT + 1
1
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Figura 7. 6. Efecto de aadir un cero en la cadena abierta. a) Diagrama a bloques,
b)LDR sin polo y con un cero con una constante de tiempo de 0.5s
Adicin de un cero en la cadena abierta con Tz 0, 0.5, 1, y 5 s
Tiempo (sec)
A
m
p
litu
d
0 5 10 15
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
T
z
=5s
T
z
=1s
T
z
=0.5s
T
z
=0s
Adicin de un cero en la cadena abierta con Tz 0, 0.5, 1, y 5 s
Tiempo (sec)
A
m
p
litu
d
0 5 10 15
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
T
z
=5s
T
z
=1s
T
z
=0.5s
T
z
=0s
Figura 7. 7. Respuesta al escaln unitario de
la planta referencia al que se le ha aadido
un cero en la cadena abierta
7.1.3 Adicin de un cero en la cadena abierta
Los ceros en la cadena abierta hacen que el sistema se vuelva ms estable y ms
rpido. Este efecto se observa empleando el LDR. Las ramas son atradas hacia la
ubicacin del cero. Luego si el cero est en el semiplano negativo, las ramas se alejarn
del semiplano positivo y consecuentemente, el sistema se volver ms estable y tambin
ms rpido.
No obstante, un aumento desmedido de
la constante de tiempo del cero, T
Z
, provocar
un aumento de la sobreoscilacin. En la figura
7.6 se le ha aadido un cero en la cadena
abierta a la planta de referencia. La salida del
sistema sin el cero es ms lenta que cuando se
le ha aadido un cero con una constante de
tiempo de 0.5 s y de 1s. Al aumentar
excesivamente la constante de tiempo su
comportamiento deja de ser adecuado.
7.1.4 Adicin de un cero en serie
Los ceros en serie tienen una
componente predictiva o anticipadora como
consecuencia de su efecto derivativo. En el
dominio frecuencial, los ceros suponen una amplificacin del espectro de la alta
frecuencia. Por lo tanto es fcil de entender que ante una excitacin el sistema al que se
Captulo 7: Sistemas de orden superior Apuntes de Regulacin Automtica
164 Dpto. Electrnica, Automtica e Informtica Industrial
1 2
2
+
n n
s s
k
( )
z
sT + 1
y(t)
( ) t y
*
1 2
2
+
n n
s s
k
( )
z
sT + 1
y(t)
( ) t y
*
le ha agregado el cero, la respuesta ser con mayor sobreoscilacin y con una
disminucin del tiempo de pico.
Para su verificacin considrese un sistema de segundo orden al que se le aade
un cero de primer orden. Al conjunto se le aplica una entrada en escaln. En
transformada de Laplace permitir una descomposicin en dos fracciones:
( )
+
+
=
1 2 1 2
.
1
2 2
n n
z
n n
s s
k s
T
s s
k
s
s Y
Si se llama y
*
(t) a la respuesta del sistema sin el cero, la salida del conjunto ante
una entrada en escaln ser:
( ) ( ) ( ) t y T t y t y
z
* *
+ =
La respuesta es una combinacin
lineal entre la respuesta del sistema sin
el cero ms la derivada de la respuesta.
Ntese por el teorema de la
diferenciacin que s es el operador
derivador respecto del tiempo.
Suponiendo que el modelo sea el de
referencia (
n
= 1,=0.5 y k=1), la salida
ante una entrada en escaln ser dada
por la suma de sus dos parte. En la figura
7.8 queda reflejada la respuesta del
sistema con el cero aadido en cascada.
El tiempo de pico disminuye cuando se
aade el cero, vase la evolucin de y(t)
y de y*(t). Tambin se aprecia el carcter
tpico de la derivada de una seal, la
(7. 1)
(7. 2)
0 2 4 6 8 10 12
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
Respuesta ante una entrada en escalon unitario con cero aadido en la cadena cerrada
tiempo (sec)
A
m
p
lit
u
d
Tz y*(t)
y*(t)
y(t)
Figura 7. 8. Respuesta de la planta referencia al
que se le ha aadido un cero con una constante de
tiempo de 0.5s
Apuntes de Regulacin Automtica Captulo 7: Sistemas de orden superior
Dpto. Electrnica, Automtica e Informtica Industrial 165
Adicin de un cero en la cadena cerrada con Tz 0, 0.5, 1, 2 y 4 s
Tiempo (sec)
A
m
p
lit
u
d
0 2 4 6 8 10 12
0
0.5
1
1.5
2
2.5
3
T
z
=0s
T
z
=4s
T
z
=2s
T
z
=1s
T
z
=0.5s
Adicin de un cero en la cadena cerrada con Tz 0, 0.5, 1, 2 y 4 s
Tiempo (sec)
A
m
p
lit
u
d
0 2 4 6 8 10 12
0
0.5
1
1.5
2
2.5
3
T
z
=0s
T
z
=4s
T
z
=2s
T
z
=1s
T
z
=0.5s
Figura 7. 9 Evolucin de la planta con la adiccin de un cero en la cadena cerrada
%Efecto de aadir polos en serie
w = 1; %Frecuencia natural
e= .5; %Factor de amortiguamiento
g1 =tf(w^2,[1 2*e*w w^2]);
step(g1,series(g1,tf(1,[.5 1])),series(g1,tf(1,[1 1])),...
series(g1,tf(1,[2 1])),series(g1,tf(1,[4 1])));
title('Adicin de un polo en serie con Tp 0, 0.5, 1, 2 y 4 s');
pause;
%Efecto de aadir polo en la cadena abierta
step(feedback(g1,1),feedback(series(g1,tf(1,[.5 1])),1),...
feedback(series(g1,tf(1,[1 1])),1),feedback(series(g1,tf(1,[5 1])),1));
title('Adicion de un polo en la cadena abierta con Tp 0, 0.5, 1, y 5 s');
pause;
%Efecto de aadir ceros en serie
step(g1,series(g1,tf([.5 1],1)),series(g1,tf([1 1],1)),...
series(g1,tf([2 1],1)),series(g1,tf([4 1],1)));
title('Adicion de un cero en serie con Tz 0, 0.5, 1, 2 y 4 s');
pause;
%Efecto de aadir uncero en la cadena abierta
step(feedback(g1,1),feedback(series(g1,tf([.5 1],1)),1),...
feedback(series(g1,tf([1 1],1)),1),feedback(series(g1,tf([5 1],1)),1));
title('Adicion de un cero en la cadena abierta con Tz 0, 0.5, 1, y 5 s');
pause;
anticipacin. La derivada de la seal de salida, sin el cero (T
z y *(t)), es predictiva
respecto a y*(t).
A la planta
referencia se le ha
aadido varios ceros en
serie, cuyas constantes
de tiempo de los ceros se
han hecho variar y se le
han aplicado una entrada
en escaln. En la figura
7.9 se nota que un
aumento de la constante
de tiempo, por
aplicacin de la ec. 7.2,
supone un incremento de
la influencia de la
componente derivativa.
El conjunto presenta
mayor sobreoscilacin y
una disminucin del tiempo de pico.
Las grficas aqu obtenidas de la respuesta de la planta referencia ante la adicin
de polos y ceros puede conseguirla a travs del siguiente cdigo MATLAB:
Captulo 7: Sistemas de orden superior Apuntes de Regulacin Automtica
166 Dpto. Electrnica, Automtica e Informtica Industrial
Regin de
polos
insignificantes
Regin de
polos
dominantes
-1/T
d
d = 5 a 10
d
o
T
d
> 5 a 10 T
-
d
-1/T
Regin de
polos
insignificantes
Regin de
polos
dominantes
-1/T
d
d = 5 a 10
d
o
T
d
> 5 a 10 T
-
d
-1/T
Figura 7. 10. Reglas para la determinacin de la
regin de los polos dominantes
7.2 Sistema equivalente reducido
Los modelos de las plantas, en la prctica, suelen superar a los sistemas de
segundo orden. Sin embargo, la influencia de los polos de la cadena cerrada no son
todos de igual importancia. Aquellos que estn ms cerca del semiplano positivo son
ms lentos en su evolucin temporal que otros orientados hacia el - del semiplano
negativo.
A los polos ms prximos al semiplano positivo se les llama dominantes y a los
otros polos insignificantes.
La regla prctica de
clasificacin de unos sobre otros
depende de si el polo dominante
es complejo conjugado o de
primer orden. Si es complejo
conjugado, debe de haber una
distancia sobre el eje real de 5 a
10 veces el valor de la constante
de amortiguamiento, entre el
polo dominante y el resto de los
polos. Para los polos dominantes
de primer orden, el valor de la
constante del polo dominante
debe de ser al menos 5 a 10 veces
mayor que el de los polos
insignificantes.
La reduccin del orden
del sistema simplifica tanto la fase de anlisis como de diseo. En la prctica, se
emplean las caractersticas dinmicas de los sistemas de primer o de segundo orden para
definir los requisitos de diseo, aunque el sistema sea de mayor orden. Desde luego no
tiene sentido hablar del coeficiente de amortiguamiento o de la frecuencia natural de un
sistema si es de tercer, cuarto o de orden superior.
El comportamiento de los sistemas de orden elevado puede aproximarse por otro
equivalente de segundo o primer orden. La respuesta del equivalente no es idntica, no
tiene tantos matices, pero se aproximan y se hace factible aplicar reglas sencillas tanto
para la prediccin de su comportamiento como para el diseo.
Hay dos formas de reducir el orden de un sistema:
1. Por aplicacin de la teora de polos dominantes. Los polos ubicados en la
regin de insignificantes pueden ser eliminados.
2. Mediante la cancelacin entre el efecto de un polo y un cero prximo entre
s.
Apuntes de Regulacin Automtica Captulo 7: Sistemas de orden superior
Dpto. Electrnica, Automtica e Informtica Industrial 167
Una vez reducido el grado del polinomio caracterstico se ajustar la ganancia
esttica para que el comportamiento en el rgimen permanente sea idntico. Esta
condicin requiere que las ganancias estticas sean idnticas, tanto la del reducido como
la del modelo de la planta:
( ) ( ) s G s G
eq
s s 0 0
lim lim
=
Ejemplo 7.1
Dibujar la respuesta aproximada al escaln unitario de estos dos
sistemas
a) ( )
( )
( )( ) 3 5 2
5 3
2
1
+ + +
+
=
s s s
s
s G
b) ( )
( )
( )( ) 15 20 1 . 0
1 30
2
2
+ + +
+
=
s s s
s
s G
a) Para el primer caso, la planta est constituido por un polo complejo y
conjugado, 2 1
2 , 1
j s = , y por un polo de primer orden, 3
3
= s . No estn separados
a una distancia de 5 veces la constante de amortiguamiento del polo dominante. Sin
embargo, el efecto del polo de primer orden y del cero se pueden cancelar. Si se hace la
reduccin, habr diferencias entre la respuesta de la planta y la de su equivalente,
debido a la discrepancia de constantes de tiempo entre el polo y el cero a cancelar.
El equivalente reducido estar determinado por el polo complejo conjugado y
por una ganancia k
*
que mantenga la misma ganancia esttica que la planta:
( ) ( ) ( ) ( )
5 2
5
1
3 5
5 3
0
5
3
0
5 2
3
2
1
*
2
*
+ +
=
= =
=
+ +
s s
s G G
k
G
s s
k
s G
eq eq eq
El equivalente reducido es un sistema de segundo orden simple, luego ser
posible calcular sus valores caractersticos de la evolucin temporal:
= =
s
t s t
p
57 . 1
2
= =
% 79 . 20 2079 . 0
2 /
<> = =
e M
p
rad arctg 1 . 1 2 = = s t
r
1
2
=
=
Los resultados de la simulacin en MATLAB hacen notar que las discrepancias
pueden ser aceptable:
(7. 3)
Captulo 7: Sistemas de orden superior Apuntes de Regulacin Automtica
168 Dpto. Electrnica, Automtica e Informtica Industrial
0 1 2 3 4 5 6
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Respuesta al escaln
A
m
p
l
i
t
u
d
G
eq
(s)
G
1
(s)
0 1 2 3 4 5 6
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Respuesta al escaln
A
m
p
l
i
t
u
d
G
eq
(s)
G
1
(s)
b) El segundo caso tambin se trata de un sistema de tercer orden. Al
descomponerlo en polos y ceros la FDT, se observa que el efecto del cero se puede
compensar con el polo de constante de tiempo 1/0.78s:
( )
( )
( )( )
( )
( )( )( ) 78 . 0 22 . 19 1 . 0
1 30
15 20 1 . 0
1 30
2
2
+ + +
+
=
+ + +
+
=
s s s
s
s s s
s
s G
El resultado de esta reduciendo puede ser simplificado al analizar la ubicacin
del polo 19.22 respecto de 0.1. Hay suficiente distancia como para aplicar el concepto
de polo dominante. Igualando las ganancias estticas se tendr el equivalente reducido:
( ) ( )
1 . 0
2
20
78 . 0 22 . 19 1 . 0
30
1 . 0
0
1 . 0 +
= =
= =
+
=
s
G
k
G
s
k
s G
eq eq eq
La respuesta ante una entrada en escaln se corresponder a un sistema de
primer orden, con ganancia 20 y con un tiempo de establecimiento de 30s. La
simulacin muestra que no hay casi diferencias entre la planta y su equivalente
reducida.
Apuntes de Regulacin Automtica Captulo 7: Sistemas de orden superior
Dpto. Electrnica, Automtica e Informtica Industrial 169
0 10 20 30 40 50 60
0
2
4
6
8
10
12
14
16
18
20
Respuesta al escaln
A
m
p
l
i
t
u
d
G
eq
(s)
G
2
(s)
0 10 20 30 40 50 60
0
2
4
6
8
10
12
14
16
18
20
Respuesta al escaln
A
m
p
l
i
t
u
d
G
eq
(s)
G
2
(s)
M
x
y
M
x
y
7.3 Problemas
Problema 1
En la figura se muestra un modelo de
suspensin de vehculos de traccin. Haciendo
suposiciones de simplificacin y de reparto del peso
del coche sobre las cuatro ruedas. Se pide:
1. Conjunto de ecuaciones algebro-
diferenciales que describe la dinmica del
modelo simplificado.
2. Funcin de transferencia entre el desnivel del
pavimento (causa), Y(s), con el
desplazamiento del chasis (efecto), X(s).
3. Obtener el equivalente reducido.
4. Empleando el modelo del apartado anterior, determinar la dinmica del
chasis ante una variacin del asfalto de 10 cm.
5. Deducir si la respuesta del equivalente reducido es ms lenta o rpida
que la del propio modelo.
Captulo 7: Sistemas de orden superior Apuntes de Regulacin Automtica
170 Dpto. Electrnica, Automtica e Informtica Industrial
l
1
l
2
M
1
B
1
R, L
M
2
K
2
B
2
x
1
x
2
e(t)
l
1
l
2
M
1
B
1
R, L
M
2
K
2
B
2
x
1
x
2
e(t)
Datos
El peso del vehculo es de una tonelada y las caractersticas del
amortiguador estn dadas por B = 500 Ns/m y K = 1000 N/m.
1. El modelo simplificado de suspensin del coche es:
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )
n
Mg Mx t K x t y t B x t y t
f t K x t y t B x t y t
= + +
= +
2. El conjunto de ecuaciones requiere variaciones alrededor del punto de reposo. Su
FDT es:
( )
( )
2 2
25 . 0 5 . 0 1
5 . 0 1
s s
s
K Bs Ms
Bs K
s y
s x
+ +
+
=
+ +
+
=
3. El equivalente reducido ser eliminado el cero de la cadena cerrada:
( )
2
25 . 0 5 . 0 1
1
s s
s M
eq
+ +
=
4. Determinado la frecuencia natural del equivalente y el coeficiente de
amortiguamiento se determinar los valores caractersticos de la respuesta al
escaln:
s t M s t s t
r p p s
21 . 1 % 67 . 16 81 . 1 14 . 3 = = = =
5. La respuesta del modelo tendr mayor sobreoscilacin y el tiempo de pico
disminuir respecto al del equivalente reducido por aadir un cero en la cadena
cerrada.
Problema 2
La figura muestra el
modelo simplificado de un
telgrafo. Ante la recepcin de
un pulso elctrico se produce
una fuerza magntica
proporcional a la corriente de
su bobina, originando un
desplazamiento en la palanca
que provoca el movimiento de
la masa del martillo, el cual
choca contra una campana,
produciendo una onda sonora. Sabiendo que la FDT es:
Apuntes de Regulacin Automtica Captulo 7: Sistemas de orden superior
Dpto. Electrnica, Automtica e Informtica Industrial 171
( )
( )
( )
2
2 1 2 1 2 2
1 2 1 2 2
2 1 2 1 1
p
k x s
e s
l l l l l
R sL M M s B B s k
l l l l l
=
+ + + + +
1. Determinar la evolucin de x
2
(t) ante una entrada en escaln de un
voltio. Emplese un modelo equivalente simplificado.
2. Respuesta de la salida ante un impulso en la entrada.
Datos
Bobina: L = 1 mH, R = 10 , k
p
= 0.4 N/A, M
1
= 1 g, B
1
= 0.01 Ns/m.
Palanca: l
1
= 8 cm, l
2
= 2 cm.
Martillo: M
2
= 10 g, B
2
= 0.8 Ns/m, K
2
= 16 N/m.
Problema 3
Para la traslacin
horizontal de una cmara de
vdeo pan-tilt se ha utilizado una
cinta transportadora. En el
control se ha utilizado un motor
de continua y una reductora. Se
pide:
1) Diagrama de bloques del
sistema
2) FDT entre la velocidad de desplazamiento del carro y la tensin en el
motor.
3) Si se le aplica una tensin de 10V al motor, determinar la evolucin de la
velocidad del carro, tanto grficamente como analticamente (aplquese
equivalente reducido).
4) Con la seal recibida del anterior apartado, Cunto se habr
desplazado, aproximadamente, la cmara despus de cinco segundos?
Datos:
Motor: Resistencia de armadura = 7.94 , Inductancia equivalente del
flujo disperso = 1.54 mH, Constante del par motor = 39.3 mNm/A., Constante
de la fuerza contralectromotriz => 243 rpm/V, Momento de inercia del rotor=
26.6 gr cm
2
Tren de engranajes: relacin de transmisin = 1:198
Captulo 7: Sistemas de orden superior Apuntes de Regulacin Automtica
172 Dpto. Electrnica, Automtica e Informtica Industrial
Cinta transportadora: Radio de las poleas = 25 mm, Peso de la cmara=
1200 gr. Rozamiento viscoso equivalente de las poleas = 10
-1
N.m.s/rad.
1.
2. La FDT entre la velocidad de desplazamiento del carro con la tensin del
motor es:
( )
( ) ( )( ) 17 . 75 5082
33 . 1211
10 56 . 1 10 11 . 2 10 96 . 4
10 96 . 4
3 5 2 9
6
+ +
=
+ +
s s s s s u
s x
m
3. El equivalente reducido queda:
( )
( ) ( ) 17 . 75
238 . 0
+
s s u
s x
m
Ante una entrada de 10V, la velocidad de desplazamiento de carro sigue la
expresin analtica de:
( ) ( )
t
e t x
17 . 75
1 0317 . 0
=
Y la evolucin de la velocidad del carro con el tiempo ser:
Apuntes de Regulacin Automtica Captulo 7: Sistemas de orden superior
Dpto. Electrnica, Automtica e Informtica Industrial 173
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
System: untitled1
Final Value: 0.0317
Evolucion de la velocidad del carro
tiempo (sec)
[
m
/
s
]
4. Como se ve en la grfica, la velocidad del carro alcanza el rgimen
permanente en 40 ms, por tanto, la velocidad es prcticamente constante y el espacio
recorrido en 5 segundo ser 0.0317[m/s] x 5 [s] = 0.1585 [m].
Problema 4
Se utiliza un dispositivo de
rastreo digital de rayos X para
inspeccionar tarjetas de circuitos
impresos, montados en una
plataforma X-Y accionada por un
tornillo, como se muestra en la figura
a). La posicin de la plataforma o
referencia es calculada por un
computador. La figura b) muestra el
diagrama de bloques del control
proporcional (G
c
(s)=K) de uno de los
ejes de la plataforma. G
p
(s)
representa la dinmica del motor y la
plataforma. Para el sistema
realimentado de la figura b),
caracterizar la evolucin temporal de la salida ante una perturbacin de escaln
unitario (puede considerar un equivalente reducido). El regulador es de
ganancia unitario.
La FDT entre la salida y la perturbacin ser:
( )
( )
( )
( )
( )
2
2
4
+
+
= =
s
s s
s P
s Y
s G
P
Por las proximidades entre el cero de -4 y el polo doble de -2 se podra obtener
un equivalente reducido:
Captulo 7: Sistemas de orden superior Apuntes de Regulacin Automtica
174 Dpto. Electrnica, Automtica e Informtica Industrial
( )
( ) 2 +
s
s
s G
Peq
Ante una entrada en escaln unitario de la perturbacin, la evolucin de la salida
corresponder a:
( )
t
e t y
2
=
Simulacin entre la respuesta real y la obtenida por el equivalente reducido:
Problema 5
En la figura se muestra un
sistema de suspensiones activas
para un vehculo. En paralelo con el
clsico amortiguador pasivo (con
constante equivalente K, B), el
sistema activo utiliza un actuador
hidroneumtico, controlado a partir
de la medida captada por la posicin
de la cabina. La fuerza del actuador
es proporcional, k
a
, a la tensin
recibida en la electrovalvula, u(t). La
seal muestrada de posicin, y
m
,
sigue con ganancia k
m
al movimiento
vertical de vehculo. El compensador
es de tipo proporcional. Se pide:
1. Conjunto de ecuaciones algebro-diferenciales que describe la
dinmica del sistema de control.
K
B
M
y
m
(t)
posicin
G
c
(s)
Fuerza
actuador
Controlador
rueda
x(t)
y(t)
y
ref
(t)
-
u(t)
K
B
M
y
m
(t)
posicin
G
c
(s)
Fuerza
actuador
Controlador
rueda
x(t)
y(t)
y
ref
(t)
-
u(t)
Apuntes de Regulacin Automtica Captulo 7: Sistemas de orden superior
Dpto. Electrnica, Automtica e Informtica Industrial 175
2. Diagrama a bloques del sistema linealizado alrededor del punto de
reposo.
3. Calcular la FDT
( )
( ) s x
s y
, cuando la seal de mando es nula ( ) 0 = t y
ref
y el compensador es unitario.
4. Evolucin temporal aproximada de la salida del apartado anterior ante
un escaln unitario como excitacin.
5. Evaluar las mejoras de la suspensin activa respecto al sistema
clsico: excitar la entrada con un escaln unitario y ver la evolucin temporal
con la suspensin clsica y comparar los resultados con el apartado anterior.
Datos
M = 250 kg, B = 500 Ns/m, K=1000N/m, k
a
= 100 N/V, k
m
= 10V/m
La suspensin activa queda definida por el siguiente conjunto de ecuaciones
algebro-diferenciales:
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( )
ref m c a
m m
e t y t y t u t k e t f t k u t
Mg My t K y t x t B y t x t f t
y t k y t
= = =
= + + +
=
El diagrama a bloques incremental del modelo estar definido por:
Lo normal es que la seal de referencia sea nula, esto es, preservando la posicin
inicial de la cabina. La FDT entre las variaciones en camino, x , y las variaciones de la
cabina, y ser:
( )
( ) 2000 500 250
500 1000
2
+ +
+
=
s s
s
s x
s y
Captulo 7: Sistemas de orden superior Apuntes de Regulacin Automtica
176 Dpto. Electrnica, Automtica e Informtica Industrial
La FDT sin suspensin activa es igual a:
( )
( ) 1000 500 250
500 1000
2
+ +
+
=
s s
s
s x
s y
Las diferencias entre el mtodo clsico y el activo quedan reflejadas ante una
variacin en escaln unitario. Mientras que en el sistema de suspensin clsica, la
cabina sigue las irregularidades del camino, no sucede lo mismo con la activa.
Obsrvese que si se variase el compensador, la fuerza activa podra mantener la cabina,
al cabo de un cierto tiempo, en posicin de reposo. Tambin resulta ms rpido la
respuesta temporal del sistema activo.
Derecho de Autor 2008 Carlos Platero Dueas.
Permiso para copiar, distribuir y/o modificar este documento bajo los trminos
de la Licencia de Documentacin Libre GNU, Versin 1.1 o cualquier otra
versin posterior publicada por la Free Software Foundation; sin secciones
invariantes, sin texto de la Cubierta Frontal, as como el texto de la Cubierta
Posterior. Una copia de la licencia es incluida en la seccin titulada "Licencia de
Documentacin Libre GNU". La Licencia de documentacin libre GNU (GNU
Free Documentation License) es una licencia con copyleft para contenidos
abiertos. Todos los contenidos de estos apuntes estn cubiertos por esta licencia.
La version 1.1 se encuentra en http://www.gnu.org/copyleft/fdl.html. La
traduccin (no oficial) al castellano de la versin 1.1 se encuentra en
http://www.es.gnu.org/Licencias/fdles.html
También podría gustarte
- ATS Armado de AndamiosDocumento12 páginasATS Armado de AndamiosViktor Montoya67% (3)
- Trabajo de ErgonomiaDocumento13 páginasTrabajo de ErgonomiaHugo QuillahuamanAún no hay calificaciones
- Manitou MLT 634 (ES)Documento20 páginasManitou MLT 634 (ES)ManitouAún no hay calificaciones
- Interpolacion Con ExcelDocumento4 páginasInterpolacion Con ExcelconancaAún no hay calificaciones
- Termodinamica Sustesc7Documento3 páginasTermodinamica Sustesc7leonardo morenoAún no hay calificaciones
- Microcontroladores Definitivo (Resumen)Documento15 páginasMicrocontroladores Definitivo (Resumen)Anibal RomeroAún no hay calificaciones
- Control de Inventario FarmaciaDocumento2 páginasControl de Inventario FarmaciaYara Stefani FloresAún no hay calificaciones
- Problemas Campo Electrico SELECTIVIDAD LOGSEDocumento5 páginasProblemas Campo Electrico SELECTIVIDAD LOGSEMiguel Angel MoraAún no hay calificaciones
- Fabrica AbstractaDocumento4 páginasFabrica AbstractaRocio Vazquez FurelosAún no hay calificaciones
- 01 - Planilla Aguas ABAJO Del Medidor 2Documento1 página01 - Planilla Aguas ABAJO Del Medidor 2Fernando LozanoAún no hay calificaciones
- LH5erako 20.000 Ordenagailur Erosteko LehiaketaDocumento17 páginasLH5erako 20.000 Ordenagailur Erosteko Lehiaketasustatu100% (2)
- Elaboración Del Concreto Con Fibras de Neumático en Desuso en La Cuidad de JuliacaDocumento4 páginasElaboración Del Concreto Con Fibras de Neumático en Desuso en La Cuidad de JuliacaMarcoz VargasAún no hay calificaciones
- Puente SibayoDocumento2 páginasPuente SibayoJorge M. GalecioAún no hay calificaciones
- Informe de QuimicaDocumento16 páginasInforme de QuimicaSandra TejadaAún no hay calificaciones
- Novedades Awaduct AcustikDocumento13 páginasNovedades Awaduct AcustikjuampicAún no hay calificaciones
- Estilo Arquitectónico Llamadas y RetornoDocumento6 páginasEstilo Arquitectónico Llamadas y RetornoMauricio HerreraAún no hay calificaciones
- Tarea 1 CalibresDocumento4 páginasTarea 1 CalibresMiguel GereAún no hay calificaciones
- 5458918A02Documento4 páginas5458918A02alejolibrookAún no hay calificaciones
- CCNN - 1 ESO - MEC - Adaptacion Curricular PDFDocumento13 páginasCCNN - 1 ESO - MEC - Adaptacion Curricular PDFCarmen Peña ValtueñaAún no hay calificaciones
- 1 INFORME DE OBRA Nº01 SEGURIDADDocumento67 páginas1 INFORME DE OBRA Nº01 SEGURIDADAlejandro VásquezAún no hay calificaciones
- Edafologia IntroDocumento17 páginasEdafologia IntroCarlos Daniel Cardenas ClementeAún no hay calificaciones
- Perdidas en Tuberias Informe 6Documento18 páginasPerdidas en Tuberias Informe 6REINA MARGARITA ARANCIBIA LLANOSAún no hay calificaciones
- Tfg-Gar DimDocumento265 páginasTfg-Gar DimAnibal ArteagaAún no hay calificaciones
- San Martin Libro Armas 04 LuftwaffeDocumento83 páginasSan Martin Libro Armas 04 Luftwaffejdrm590% (10)
- Manual Caldera Mural Electrica Ekno ln2Documento28 páginasManual Caldera Mural Electrica Ekno ln2Hernán Leandro HirschhornAún no hay calificaciones
- Nec de Construciion PDFDocumento20 páginasNec de Construciion PDFWILSON VELASTEGUIAún no hay calificaciones
- 2 - AccesoPorCuerdasDocumento21 páginas2 - AccesoPorCuerdasSOPORTE VIRTUALAún no hay calificaciones
- PREVENCION RIESGOS ANDAMIOSv01Documento24 páginasPREVENCION RIESGOS ANDAMIOSv01Roberto AlvarezAún no hay calificaciones
- Robot Brochure AbrilDocumento10 páginasRobot Brochure AbrilDanny BrionesAún no hay calificaciones
- Pai Proure 2017 2022Documento128 páginasPai Proure 2017 2022John Fredy Martínez CardonaAún no hay calificaciones