Documentos de Académico
Documentos de Profesional
Documentos de Cultura
Esta Bili Dad
Esta Bili Dad
Cargado por
julfo05Derechos de autor
Formatos disponibles
Compartir este documento
Compartir o incrustar documentos
¿Le pareció útil este documento?
¿Este contenido es inapropiado?
Denunciar este documentoCopyright:
Formatos disponibles
Esta Bili Dad
Esta Bili Dad
Cargado por
julfo05Copyright:
Formatos disponibles
1.
TEORI A DE ESTABI LI DAD DE SI STEMAS DI NAMI COS
El Segundo Mtodo de Lyapunov (caso autnomo)
Estereportepresenta el mtodo directo deLyapunov para determinar la estabil-
idad o estabilidad asinttica de un estado deequilibrio de un sistema deecuaciones
diferenciales ordinarias autnomo. El presentetrabajo pretendeser una introduccin
al extenso tema dela teora dela estabilidad, degran actualidad eimportancia hoy
en da, a pesar dehaber transcurrido casi un siglo en quefuera presentada en trmi-
nos precisos por el matemtico ruso A. M. Lyapunov (1857-1918) en su famosa tesis
doctoral publicada por primera vez en 1892, la cual no recibi la debida atencin
alrededor de25aos.
1.1. I NT RODUCCI ON
Los conceptos de estabilidad e inestabilidad estn presentes en la vida cotidiana.
Es de uso comn decir: el franco suizo es estable, el peso mexicano es inestable, el
estadodesaluddefulanoesestable, etc. Incluso, enmuchasreasdel conocimiento, se
manejadichoconceptodemaneraintuitiva, escomnor auningenierodecir queuna
estructura es estableo no lo es, un qumico dicequeuna reaccin seha estabilizado,
un economista sueledecir queel precio dedeterminado producto es estable, un fsico
diraqueel movimientodeunapartculaesestable, etc. Perounconceptoqueaparece
frecuentementeen todas las ciencias, mereceser denido en trminos precisos.
No fuesino hasta 1892 cuando Lyapunov formul demanera precisa el concepto
de estabilidad. Y ese ha sido el punto de partida para establecer otras variantes
de tan importante concepto (Y son bastantes!.) De hecho, no hay concepto en la
Matemtica queadmita tantas acepciones distintas como el deestabilidad y por este
motivo, cuando sehabla deestabilidad, sedebeaclarar a cual deellas sereere, para
evitar ambigedades.
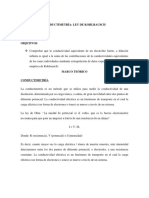
A manera de ejemplo, consideremos el movimiento de una canica que se mueve
bajo la accin de la gravedad sobre diferentes supercies como las mostradas en la
gura 1.1. En los cuatro casos, la canica seencuentra en una posicin deequilibrio,
pero cul ser el movimiento que ejecuta la canica si la sacamos un poco de su
estado de equilibrio y la soltamos? En los casos (a) y (b) , la canica se mantendr
cerca desu posicin deequilibrio oscilando alrededor desta, pero adems, debido a
la friccin, la canica tender a ocupar dicha posicin deequilibrio. En ambos casos,
el equilibriosediceser asintticamenteestable, lanicadiferenciaqueexisteen estos
dos casos, es que la perturbacin que le hagamos a la canica para sacarla de su
estado deequilibrio debeser mucho menor para el caso (b) . Si ahora nos jamos en
la canica del inciso (c) , cualquier perturbacin por pequea questa sea, la canica
sealejar desu posicin deequilibrio; en estecaso el equilibrio es inestable.
Finalmente, en (d) , para cualquier perturbacin pequea de la canica, sta
permanecer cerca dela posicin deequilibrio pero no tender a acercarsea dicha
posicin deequilibrio y estaremos en presencia deestabilidad (no asinttica).
Como un segundo ejemplo considreseuna regla clavada en la pared en las posi-
ciones deequilibrio mostradas en la gura 1.2, ah seindican los tres tipos diferentes
Figura1.1: (a) y (b) Asintticamenteestables, (c) Inestable, (d) Estable(noasintti-
camente).
Figura 1.2: (a) Estabilidad asinttica. (b) Estabilidad (no asinttica). (c) Inestabili-
dad.
deposiciones deequilibrio.
1.2. NOTACI ON
i) B
!
eslaboladeR
n
concentroenel origen, esdecir, B
!
= {x ! R
n
: kxk < !, ! > 0,
con kk la norma euclideana}(no seexcluyeel caso ! =".)
ii) f : B
!
#R
n
, x 7$#f (x) es una funcin declaseC
1
.
iii) f (0) = 0.
Consideremos la ecuacin diferencial autnoma
d
df
x(t) = f (x(t))
la cual por brevedad escribimos
x= f (x) (1.1)
en donde
x=
dx
dt
y omitimos la variableindependientet.
Lacondicin (ii) garantizalaexistenciay unicidad delas soluciones de1.1, mien-
tras quelacondicin (iii) implicaquelafuncin idnticamenteceroes solucin de1.1
la cual llamaremos el equilibrio o el origen.
Sea x
0
! B
!
, la solucin de1.1 queen t = 0 pasa por x
0
la denotamos "(t, x
0
) ,
es decir, esta solucin es tal que"(0, x
0
) = x
0
. Ver la gura 1.3para el caso n = 2.
2
1.3. DEFI NI CI ONES
El equilibrio de1.1 sediceser (en el sentido deLyapunov):
i) Estable. Si para cada # > 0, ! % # existe$ (#) > 0 tal quesi kx
0
k < $ entonces
k"(t, x
0
)k < # & t % 0.
ii) Atractivo. Si existe$ > 0, ! % $ tal quesi kx
0
k < $ entonces limk"(t, x
0
)k =0
cuando t #".
iii) AsintticamenteEstable. Si l
a) es estable
b) es atractivo
iv) Inestable. Si l no es estable.
Las guras (1.4)-(1.7) ilustran los cuatro conceptos para el caso n = 2.
Figura 1.3: Grca dela solucin "(t, x
0
) , n=2.
Figura 1.4: Estabilidad del origen. Cualquier solucin que en t = 0 comience en el
cilindro debasederadio $ no puedeabandonar el cilindro debasecon radio #.
NOTA BENE:
Lainestabilidad y laatractividad son perfectamentecompatiblescomosemuestra
en el siguienteejemplo:
EJ EMPLO
Considreseel siguientesistema en coordenadas polares (n =2)
3
Figura 1.5: Atractividad del origen. Cualquier solucin que en t = 0 comience en
el cilindro debasecon radio $, eventualmentepuedeabandonarlo, pero nalmente
permanecedentro del mismo.
Figura 1.6: Estabilidad asinttica del origen.
!
"
#
%=sen
2
%
2
!= !(1$!)
(1.2)
enlagura(1.8) aparecenlasimgenesdelassolucionesde(1.2). Dichasimgenesson
comnmentellamadastrayectoriasurbitasdel sistema. Observamostrestrayectorias
notables: Los equilibrios A(0, 0) , B(1, 0) y el crculo unitario sin incluir el punto
B(1.0) . Las echas indican el recorrido de las mismas cuando t crece. El equilibrio
B(1, 0) es atractivo pero inestable.
En el ejemplo anterior hicimos ver el carcter inestabley a la vez atractivo deun
equilibrio queno es el origen, mientras quelas deniciones dadas sereeren precisa-
menteal origen. Aclaremos un poco esta situacin.
Con modicaciones simples en las deniciones anteriores podramos denir esos
conceptosparaunequilibrioquenofueranecesariamenteel origen, oinclusoparauna
solucin arbitraria (no necesariamenteun equilibrio). Para jar ideas, veamos como
quedara por ejemplo el concepto de estabilidad para una solucin (ja) arbitraria
4
Figura 1.7: Inestabilidad del origen.
Figura 1.8: La inestabilidad y la atractividad son compatibles.
de (1.1). Los restantes tres conceptos para este caso son anlogos de modo que los
omitiremos.
Sea"
1
(t, x
0
) unasolucinde(1.1), esdecir, estasolucinestal que"
1
(0, x
0
) =x
0
.
DEFI NI CI ON. La solucin "
1
(t, x
0
) se dice ser estable (en el sentido de Lya-
punov) si & # > 0, ! % #, existe$ (#) > 0tal quesi ky
0
k < $ entonces
k"(t, y
0
) $"(t, x
0
)k < # & t % 0.
en la gura (1.9) seilustra esta denicin para el caso n =2.
El estudiodelaestabilidad deunasolucin arbitrariasiempresereduceal estudio
dela estabilidad del origen haciendo un cambio devariableadecuado dela siguiente
manera.
Supngase que queremos vericar la estabilidad de la solucin "(t, x
0
) de (1.1),
hagamos el cambio devariable
y = x $"
1
(t, x
0
) (1.3)
derivandoestaexpresin con respectoat y sustituyendoen laecuacin (1.1) tenemos
5
Figura 1.9: Estabilidad dela solucin "
1
(t, x
0
)
y = x $ "
1
(t, x
0
) = f (y +"
1
(t, x
0
)) $f ("
1
(t, x
0
)) (1.4)
la expresin dela derecha es una funcin de(t, y) demodo quehemos obtenido una
ecuacin dela forma
y =g (t, y) (1.5)
en dondeg (t, y) = f (g +"
1
(t, x
0
)) $f ("
1
(t, x
0
)) . Seobserva inmediatamenteque
la funcin g ' 0 es una solucin de(1.5), la desventaja es queel cambio devariable
queelegimos nos lleva en el caso general a una ecuacin no autnoma (cuyo estudio
ser tema deotro reporte). Pero en muchos casos esto no presenta mayor dicultad.
EJ EMPLO (n = 1) considresela ecuacin
x= x $x
2
(1.6)
sea la solucin
"
1
(t, 1) ' 1 (1.7)
hacemos el cambio devariable
y = x $"
1
(t, 1) = x $1 (1.8)
derivando (1.8) y sustituyendo en (1.6) llegamos a
y = (1+y) $(1+y)
2
(1.9)
demodo queel estudio dela estabilidad de(1.7) equivaleal estudio dela estabilidad
del origen dela ecuacin equivalente(1.9).
OBSERVACI N: En el ejemplo anterior hemos usado el siguiente resultado
cuya prueba emitimos:
La solucin "
1
(t, x
0
) de(1.1) es establesi y slo si la solucin y ' 0 de(1.5) es
estable.
Resultados anlogos seobtienen para los tres conceptos restantes.
6
1.4. FUNCI ONES DEFI NI DAS Y SEMI DEFI NI DAS
Para determinar la estabilidad o estabilidad asintnica, a partir de las deniciones
dadas en la seccin anterior, por un lado, necesitamos conocer la expresin analtica
delas soluciones de(1.1), algoquesabemos es generalmenteimposible, por otrolado,
suponiendo que tuviramos dicha expresin para las soluciones, no es trivial hacer
las estimaciones pertinentes #, $. Existe un mtodo alternativo que no requiere el
conocimientodemaneraexpresa. Esteesel llamadomtododirectodeLyapunov que
slo requieredealgunas funciones auxiliares quea continuacin denimos:
Una funcin continua
W : B
"
#R, x 7#W (x) (1.10)
tal queW (0) = 0(dondela barra denota la cerradura dela bola B
"
) ser llamada
i) Semidenida positiva si & x ! B
"
, W(x) % 0
ii) Denida positiva si & x ! B
"
\{0}, W(x) > 0
iii) Semidenida negativa si & x ! B
"
, W(x) ( 0
iv) Denida negativa si & x ! B
"
\{0}, W(x) < 0
EJ EMPLO. Lafuncin W(x
1
, x
2
) = x
2
1
+x
2
2
es semidenidapositivasi B
"
) R
n
con n > 2, pero es denida positiva si B
"
) R
2
. Ver la gura (1.10) para el caso
n = 2.
Figura 1.10: La funcin denida positiva W (x
1
, x
2
) =x
2
1
+x
2
2
es un paraboloidecon
vrticeen el origen.
Observacin: La geometra de las funciones denidas es muy compleja. Se
ha credo errneamente que stas (para n = 2) se ven en una vecindad del origen
sucientementepequea, como la dela gura (1.10). El siguienteejemplo desmiente
esta armacin.
EJ EMPLO. La funcin W(x
1
, x
2
) generada por rotacin a lo largo del ejeW de
la funcin dada por la frmula:
h(x
1
) =
!
"
#
x
2
1
2$sen
1
x
1
, x
1
6= 0
0, x
1
= 0
(1.11)
7
es denida positiva, sin embargo, no existeninguna vecindad del origen en la cual la
funcin W seveacomo ladela gura (1.10). En lagura (1.11) apareceesbozada su
grca.
Figura 1.11: Una funcin denida positiva cuya geometra es complicada.
1.5. LA DERI VADA EULERI ANA
SeaW(x) unafuncindenida(positivaonegativa) declaseC
1
sobreB
"
yconsidrese
la ecuacin (1.1). Llamamos derivada euleriana deesta funcin a la expresin:
W =
dW
dt
=
n
X
i=1
&W
&x
i
dx
i
dt
=
n
X
i=1
&W
&x
i
f
i
(1.12)
en la cual las f
i
son coordenadas def.
De manera que la derivada euleriana de W es justamente la derivada de W a lo
largo desoluciones de(1.1).
Observacin: nteseque:
i)
W = *W f, lo queda lugar a una interpretacin geomtrica muy clara (ver
gura 1.12);
ii)
W es una funcin dex queseanula para x =0.
EJ EMPLO. Considresela ecuacin
x
1
=$x
2
x
2
=x
2
1
(1.13)
y la funcin denida positiva declaseC
1
sobreR
2
W(x
1
, x
2
) =x
2
1
+x
2
2
(1.14)
entonces, la derivada euleriana deW con respecto al sistema (1.13) est dada por la
expresin
W(x
1
, x
2
) =
2
X
i=1
&W
&x
i
dx
1
dt
(1.15)
8
=
2
X
i=1
&W
&x
i
f
i
= 2x
1
($x
2
) +2x
2
x
2
1
Figura 1.12: Interpretacin geomtricadeladerivadaEuleriana
W =*W f (n = 2)
1.6. FUNCI ONES DE LYAP UNOV:
Decimos queuna funcin declaseC
1
W : B
!
#R, x 7$#W(x) (1.16)
esunafuncindeLyapunov paralaecuacin(1.1), si existe' ( ! tal quesobreB
"
, W
es denida positiva (negativa) y
W (la derivada euleriana) es semidenida negativa
(positiva).
Si (1.16) es tal que, sobre B
"
es denida negativa (positiva) decimos que W es
una funcin fuertedeLyapunov para la ecuacin (1.1).
1.7. EL METODO DI RECT O DE LYAPUNOV
Yacontamosconloselementossucientesparaenunciar y demostrar losdosteoremas
clsicos deLyapunov:
T heorem 1.1. (ESTABI LI DAD). Si existeuna funcin deLyapunov para (1.1),
entonces el origen es estable.
Demostracin. Supongamos quela funcin deLyapunov
W : B
!
$#R,
x 7$#W(x)
es denida positiva, el otro caso es anlogo y lo omitimos. Sea > 0, < ' donde'
es el dela denicin dela seccin anterior. Considrese la frontera dela bola B
la
9
cual denotamos F
r
(B
), como sta es compacta y W es continua existe:
a = min{W(x) : x ! Fr (B
)}
el cual es positivo, adems, tambin por la continuidad de W, existe $ > 0 tal que
B
#
) B
y W(x) < a & x ! B
#
. Por lo tanto, si x
o
! B
#
entonces "(t, x
o
) ! B
&
t % 0, delocontrario, existeun( > 0tal que"((, x
0
) ! F
r
B
, peroestoltimoquiere
decir que:
W ("(0, x
o
)) = W(x
0
) < a ( W ("((, x
o
))
lo cual es contrario a la hiptesis, ya que
W ( 0 signica que W es decrecientecon
respecto a t. Demodo quela solucin "(t, x
o
) no puedeabandonar la bola B
.
T heorem 1.2. (ESTABI LI DAD ASI NT OT I CA). Si existeuna funcin fuerte
deLyapunov para (1.1), entonces el origen es asintticamenteestable.
Demostracin: Como en el teorema anterior, supongamos quela funcin fuertede
Lyapunov
W : B
!
#R, x 7$#W(x)
es denida positiva, el otro caso es similar y lo omitimos.
Por el teorema anterior, el origen es estable; resta probar entonces que el origen
es atractivo. Como
W < 0, esto signica que W(t) es una funcin estrictamente
decreciente y como por hiptesis W(t) est acotada por abajo por cero, seconcluye
queexiste
lim
t!"
W(t) = ) % 0.
Demostremos que ) = 0. Supongamos lo contrario, ) > 0 y deduzcamos una
contradiccin. Escogemos un nmero positivo $ < ', donde' es el queapareceen la
denicin dela seccin anterior; con la propiedad deque
W(x) < ) & x ! B
#
puestoque
W escontinuay denidanegativa, ellatieneunmximonegativo$b sobre
la cscara compacta B
"
\B
#
, demodo quesetiene:
W(t) ( $b & t % 0
eintegrando de0a t esta desigualdad, setiene:
W(t) $W(0) ( $bt & t % 0
o equivalentemente
W(t) ( $bt & t % 0
lo cual es una contradiccin, ya queW es denida positiva, por lo tanto concluimos
que) = 0.
La gura 1.13ilustra los dos teoremas anteriores
10
Figura 1.13: A estable, B asintticamenteestable. (n =2)
1.8. COMENTARI OS ACERCA DE LOS T EOREMAS DE LYAPUNOV.
Los dos teoremas de Lyapunov presentados en la seccin anterior nos proporcionan
condiciones sucientes para determinar estabilidad y estabilidad asinttica, y enfa-
tizamos el hecho de que el mtodo no requiere del conocimiento de una expresin
analtica para las soluciones de (1.1), sino nicamente del campo vectorial f(x); de
ah queselellam mtodo directo.
Por otra parte, el mtodo no indica cmo encontrar una funcin de Lyapunov
adecuada para un problema determinado. Sin embargo, en muchos modelos fsicos,
integrales de movimiento como la funcin energa, frecuentemente resultan ser un
buen punto departida para buscar funciones deLyapunov.
Obsrvese tambin, que en ambos teoremas, la $ encontrada a partir de la
dada depende de sta, pero es independiente de la variable independiente t; esto se
debea queel sistema autnomo (1.1) es invariantebajo traslaciones del tiempo t. Es
decir, para cualquier x
o
! B
e
, si "(t, x
o
) es una solucin de (1.1) , tambin lo es la
funcin "(t +c, x
o
), dondec esunaconstantereal arbitraria, esteresultadoseverica
fcilmente.
1.9. EJ EMPLOS
EJ EMP LO 1 (Sistemas gradiente). Sea
H =R
n
#R, x 7$#H(x)
una funcin declaseC
1
tal quetieneun mximo estricto en el origen. Considresela
ecuacin
x =*H(x)
tomemos como funcin deLyapunov la diferencia
W(x) = H(0) $H(x)
11
la cual es evidentementedenida positiva en alguna bola B
del origen. Adems, la
derivada euleriana es en estecaso.
W =$
n
X
i=1
&H
&x
i
2
( 0
De este modo, las condiciones del teorema 1.1 se cumplen, por lo tanto el origen es
estable. Paravisualizar esteejemplo, tomemosel casoparticularmentesimple, cuando
la funcin H es la siguiente:
H : R
2
$#R,
(x
1
, x
2
) 7$#H(x
1
, x
2
) = 1$x
2
1
$x
2
2
demodo quela ecuacin diferencial resulta ser
x
1
=$2x
1
x
2
=$2x
2
y la funcin deLyapunov ser:
W(x
1
, x
2
) = H(0, 0) $H(x
1
, x
2
) = 1$(1$x
2
1
$x
2
2
) = x
2
1
+x
2
2
cuya derivada Euleriana es
W(x
1
, x
2
) =$
&H
&x
1
2
$
&H
&x
2
2
=$4x
2
1
$4x
2
2
( 0
venselas guras (a) y (b) dela graca 1.14
Figura 1.14:
EJ EMPLO 2. Sea A una matriz n n antisimtrica, sto es: A =$A
T
(donde
A
T
indica la transpuesta deA). Considresela ecuacin lineal
x =Ax
tomemos como funcin deLyapunov el cuadrado dela norma euclideana
12
W(x) =kxk
2
la cual es obviamente denida positiva en R
n
. La derivada euleriana de W con
respecto al sistema lineal dado es:
W(x) =*W(x) Ax = 2x Ax = 2
n
X
i=1
a
ii
(x
i
)
2
demanera quelos elementos dela diagonal deA, a
ii
son ( 0es aplicableel teorema
(1.1), y as, el origen es estable, mientras que si los a
ii
son estrictamente < 0 es
aplicable el teorema (1.2) con lo que concluimos que el origen es asintticamente
estable.
EJ EMPLO 3. (Sistemas mecnicos conservativos con un grado de lib-
ertad). Consideremos el sistema
x
1
= x
2
x
2
=$g(x
1
)
dondeg es una funcin declaseC
1
real devariablereal en una vecindad del origen y
x
1
g(x
1
) > 0si x
1
6= 0
la siguientefuncin es deLyapunov
W(x) = W(x
1
, x
2
) =
1
2
x
2
2
+
x
1
Z
0
g(s)ds
En efecto, W(0, 0) = 0y si (x
1,
x
2
) 6= (0, 0), setieneque
x1
Z
0
g(s)ds > 0si x
1
6= 0
yaquelagrcadeg enunavecindadel origenesnecesariamentecomoladelagura
(1.15) nalmente, la derivada euleriana deW con respecto al sistema dado es:
W =*W (x
2
, $g(x
1
)) =(g(x
1
), x
2
) (x
2
, $g(x
1
)) ' 0
con lo cual es aplicableel teorema (1.1). As, el origen es estable.
EJ EMPLO 4. La funcin
W(x) =W(x
1
, x
2
) = x
2
1
+x
2
2
es una funcin fuertedeLyapunov para el sistema
x
1
=$x
3
1
$x
2
x
2
=x
1
$x
3
2
13
Figura 1.15: Grca dela funcin g(x
1
) con x
1
g (x
1
) > 0.
En efecto, W es denida positiva y la derivada Euleriana de W con respecto a
estesistema es:
W = *W ($x
3
1
$x
2
, x
1
$x
3
2
)
= (2x
1
, 2x
2
) ($x
3
1
$x
2
, x
1
$x
3
2
)
= $2(x
4
1
+x
4
2
)
la cual evidentementees denida negativa, demodo queel origen es asintticamente
estable.
EJ EMPLO 5. (Ecuacin de Lienard). Considrese la ecuacin escalar de
segundo orden no lineal
y + y +g(y) =0
la cual escrita como un sistema es:
x
1
= x
2
x
2
= $g(x
1
) $x
2
en dondeg es dela claseC
1
y yg(y) > 0, y 6= 0en alguna vecindad deorigen.
Una funcin deLyapunov es:
W(x
1
, x
2
) =
x
2
2
2
+
x1
Z
o
g(s)ds
En efecto, W(0, 0) = 0 y al igual quela funcin deLyapunov del ejemplo 3 setiene
que:
x1
Z
o
g(s)ds > 0si x
1
6= 0
14
Pero en estecaso la derivada Euleriana es:
W(x
1
, x
2
) = x
2
($g(x
1
) $x
2
) +g(x
1
)x
2
=$x
2
2
( 0
por loquededucimoslaestabilidaddel origenperonopodemosgarantizar estabilidad
asinttica, ya quela derivada euleriana no es denida negativa, pues sta seanula en
los puntos de la forma (x
1
, 0) es decir, sobre el eje x
1
y, por lo tanto, no se puede
aplicar el teorema (1.2).
OBSERVACI ON: En todos los ejemplos deesta seccin el origen es, en efecto,
una solucin deequilibrio.
15
También podría gustarte
- Diseño Curricular Juridiccional de La Provincia de Misiones Nivel PrimrioDocumento259 páginasDiseño Curricular Juridiccional de La Provincia de Misiones Nivel PrimrioAndy Mendoza77% (13)
- Proyecto General Literatura RegionalDocumento23 páginasProyecto General Literatura RegionalPame Alessandra Diaz100% (2)
- Formato Tabla de Valoracion DocumentalDocumento2 páginasFormato Tabla de Valoracion DocumentalAlegador84Aún no hay calificaciones
- Astonomia MayaDocumento73 páginasAstonomia MayaEnrique KaufmannAún no hay calificaciones
- Uniforme GrisDocumento3 páginasUniforme GrisAndrea C RojasAún no hay calificaciones
- Cine en MexicoDocumento9 páginasCine en MexicoRenatoMoraAún no hay calificaciones
- Control de Lectura N°1 Rodrigo Tiene Miedo Al ColegioDocumento3 páginasControl de Lectura N°1 Rodrigo Tiene Miedo Al ColegioCristina Salinas BernalAún no hay calificaciones
- Familia PinaceaeDocumento17 páginasFamilia PinaceaeEmilio ÁlvarezAún no hay calificaciones
- Tenga para Que Se EntretengaDocumento4 páginasTenga para Que Se EntretengaBrëNda Díâz TAún no hay calificaciones
- Insertar Datos Sin Recargar PaginaDocumento6 páginasInsertar Datos Sin Recargar PaginaHector TrianaAún no hay calificaciones
- Side Ea U3Documento9 páginasSide Ea U3araceliAún no hay calificaciones
- Tarea 3Documento7 páginasTarea 3maria virgenAún no hay calificaciones
- Acuerdo Plan de Desarrollo 2020Documento232 páginasAcuerdo Plan de Desarrollo 2020eldasseAún no hay calificaciones
- ISO 9000 Guia para La Gerencia PDFDocumento5 páginasISO 9000 Guia para La Gerencia PDFlfbuenoAún no hay calificaciones
- Reseña de MalincheDocumento1 páginaReseña de Malincheolgarendon0% (1)
- Ejercicios de WilliamsDocumento9 páginasEjercicios de WilliamsZidane Segura100% (1)
- Reunion 5 - Fundamento Teologico para Predicar 1 de 2Documento3 páginasReunion 5 - Fundamento Teologico para Predicar 1 de 2Hans Eduardo Bran AguirreAún no hay calificaciones
- Ensayo Sobre ReligionDocumento4 páginasEnsayo Sobre ReligionRaul DubonAún no hay calificaciones
- Marjorie Aguilar ContabilidadDocumento5 páginasMarjorie Aguilar ContabilidadMarjorieAún no hay calificaciones
- Atencion Del Niño Hospitalizado ProlongadoDocumento10 páginasAtencion Del Niño Hospitalizado ProlongadoSergio Perez0% (1)
- Investigacion Contemporanea en AprendizaDocumento224 páginasInvestigacion Contemporanea en AprendizaPaul GonzalezAún no hay calificaciones
- Practica 3 FQDocumento34 páginasPractica 3 FQArtemio Pereyra VásquezAún no hay calificaciones
- Ruta CTE JalDocumento6 páginasRuta CTE JalwendylldAún no hay calificaciones
- Actividad de La Experiencia #03 - 3° AñoDocumento6 páginasActividad de La Experiencia #03 - 3° AñoricardoAún no hay calificaciones
- Apocalipsis AnalisisDocumento13 páginasApocalipsis Analisisvecelyn garciaAún no hay calificaciones
- Campo MagnéticoDocumento6 páginasCampo MagnéticoElias Morales RosasAún no hay calificaciones
- AKINARRA 1 (La Playa de Los Inútiles) - ISSUUDocumento18 páginasAKINARRA 1 (La Playa de Los Inútiles) - ISSUUgerman2027-1Aún no hay calificaciones
- 2.populismo Laura PetrinoDocumento5 páginas2.populismo Laura PetrinoLourdes CerdaAún no hay calificaciones
- Cargas de Viento y Fuerza de SismoDocumento5 páginasCargas de Viento y Fuerza de SismoSolange GuachaminAún no hay calificaciones
- Plan de ConvivenciaDocumento11 páginasPlan de ConvivenciaLEONAVELINAAún no hay calificaciones