También podría gustarte
- Descomposiciones AditivasDocumento1 páginaDescomposiciones AditivasDaniela Parra FonsecaAún no hay calificaciones
- Principios Fisicos y Mecanicos... 2019-1Documento9 páginasPrincipios Fisicos y Mecanicos... 2019-1diana ortegaAún no hay calificaciones
- Uso Del EstereoscopioDocumento20 páginasUso Del EstereoscopioNorland Felipe Mamani0% (1)
- Numeros Adimensionales Transferencia de CalorDocumento2 páginasNumeros Adimensionales Transferencia de CalorMau Jiménez100% (1)
- Transistores BJTDocumento16 páginasTransistores BJTRAUL ALEJANDRO CASTANO TRUJILLOAún no hay calificaciones
- Entropia PDFDocumento5 páginasEntropia PDFEsteban de las casasAún no hay calificaciones
- Geografía ADUNIDocumento48 páginasGeografía ADUNIjean pablo huancas reaño100% (1)
- Manual Construccion Losas Concreto Pavimento RigidoDocumento30 páginasManual Construccion Losas Concreto Pavimento RigidoPedro Baeza J.Aún no hay calificaciones
- Laboratorio 4 Procesos Metalúrgicos I (Autoguardado)Documento14 páginasLaboratorio 4 Procesos Metalúrgicos I (Autoguardado)diogoAún no hay calificaciones
- Apuntes CADocumento200 páginasApuntes CAANTONIO GARCIA VISGLERIOAún no hay calificaciones
- (Template) Actividad de Evaluación 5 Teorema de PitágorasDocumento7 páginas(Template) Actividad de Evaluación 5 Teorema de PitágorasTrigo Alejandro Cortés GarciaAún no hay calificaciones
- EyM - Unidad 3 Ejercitario 2020-2Documento2 páginasEyM - Unidad 3 Ejercitario 2020-2Moisés AparicioAún no hay calificaciones
- HidrogeologíaDocumento24 páginasHidrogeologíaWilderAlexanderMCAún no hay calificaciones
- Matematica Geometris Recero Basico PDFDocumento1 páginaMatematica Geometris Recero Basico PDFCarolximena Rodríguez VallejosAún no hay calificaciones
- PSP - Actividad - 6.1 - Usos de Process y ProcessBuilderDocumento2 páginasPSP - Actividad - 6.1 - Usos de Process y ProcessBuilderoscardaxAún no hay calificaciones
- Vod 12Documento18 páginasVod 12Richard Cortez SosaAún no hay calificaciones
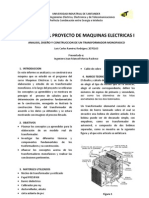
- Informe Final Construccion TrasfoDocumento9 páginasInforme Final Construccion TrasfoOscar Andres Ramirez RodriguezAún no hay calificaciones
- Antologia Fisica IV 2023Documento53 páginasAntologia Fisica IV 2023YAQUELIN RODRIGUEZ GONZALEZAún no hay calificaciones
- Como Vectorizar Una Imagen (Tutorial Propio) - Taringa!Documento12 páginasComo Vectorizar Una Imagen (Tutorial Propio) - Taringa!resmarAún no hay calificaciones
- Quimica - Semana 8Documento6 páginasQuimica - Semana 8Wilson Uturunco RafaelAún no hay calificaciones
- Guia de Laboratorio CementosDocumento14 páginasGuia de Laboratorio CementosCamila Nelida BernabeAún no hay calificaciones
- Examen Tema 5Documento2 páginasExamen Tema 5Servando ReyesAún no hay calificaciones
- BitacoraDocumento2 páginasBitacoraEdu FigueroaAún no hay calificaciones
- Absorcion AtomicaDocumento90 páginasAbsorcion AtomicaEdith YSAún no hay calificaciones
- Unidad 2.1 Circuitos Hidraulicos y NeumaticosDocumento33 páginasUnidad 2.1 Circuitos Hidraulicos y NeumaticosMisael Galicia FloresAún no hay calificaciones
- Modelos AtomicosDocumento2 páginasModelos AtomicosOmaikyAún no hay calificaciones
- Problemas Cap 2Documento6 páginasProblemas Cap 2julian correaAún no hay calificaciones
- Gps DiferencialDocumento10 páginasGps DiferencialbryanAún no hay calificaciones
- ESTRUCTURAS NAVALES I - 6ta SemanaDocumento21 páginasESTRUCTURAS NAVALES I - 6ta SemanaDiego RamosAún no hay calificaciones
- Nivelaciones de NovenoDocumento6 páginasNivelaciones de NovenoLeidy Isabel Alvarez TasconAún no hay calificaciones