
Tema 06 - Acciones Básicas de Control
Tema 06 - Acciones Básicas de Control
También podría gustarte
- Aplicaciones Del Álgebra Lineal en La Ingeniería en ComputaciónDocumento4 páginasAplicaciones Del Álgebra Lineal en La Ingeniería en ComputaciónDanilo Javier Mendez33% (3)
- Regulador Lineal Cuadrático OptimoDocumento7 páginasRegulador Lineal Cuadrático OptimoBru Cervantes AnayaAún no hay calificaciones
- 6to Lab LOU-IIDocumento8 páginas6to Lab LOU-IINilton LmlAún no hay calificaciones
- Ejercicios de ElectrodinámicaDocumento2 páginasEjercicios de ElectrodinámicaPercy Aranda Cera50% (2)
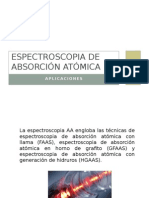
- Aplicaciones EAADocumento22 páginasAplicaciones EAAPaul ChavezAún no hay calificaciones
- Actividades Sobre Transformación de La EnergíaDocumento3 páginasActividades Sobre Transformación de La EnergíamelvinjrpichardoAún no hay calificaciones
- Práctica de Tubos ConcéntricosDocumento2 páginasPráctica de Tubos ConcéntricosmariajoserojasnietoAún no hay calificaciones
- Dupline Charla UniversidadDocumento46 páginasDupline Charla UniversidadSope Urrutia100% (1)
- Guia Resumen Carbono 2Documento4 páginasGuia Resumen Carbono 2Ricardo Antonio Muñoz PartuzaAún no hay calificaciones
- Trabajo Losas Armadas en Dos DireccionesDocumento59 páginasTrabajo Losas Armadas en Dos DireccionesEnmanuel Valero valeroAún no hay calificaciones
- Nano Celulosa - IntroduccionDocumento16 páginasNano Celulosa - IntroduccionAnahiAún no hay calificaciones
- CLASE5 EcuacionesYFormulasDocumento21 páginasCLASE5 EcuacionesYFormulasSamuel LopezAún no hay calificaciones
- Estudio Del Emplazamiento BioclimaticoDocumento6 páginasEstudio Del Emplazamiento BioclimaticoMaurizio Chipoco DiazAún no hay calificaciones
- Informe BalanceoDocumento8 páginasInforme BalanceoAndrés PulupaAún no hay calificaciones
- Cuestionario Nom-001-Stps-2008Documento13 páginasCuestionario Nom-001-Stps-2008DanielTrujilloAún no hay calificaciones
- Informe Infiltracion de SuelosDocumento5 páginasInforme Infiltracion de SuelosLuis AngelAún no hay calificaciones
- Archivo 202381321916Documento3 páginasArchivo 202381321916Damaris ZambranoAún no hay calificaciones
- Regresión y Correlación Lineal SimpleDocumento13 páginasRegresión y Correlación Lineal SimpleKayseniCenizarioDelCastillo100% (2)
- Brochure RCMDocumento6 páginasBrochure RCMjosevc317Aún no hay calificaciones
- Mecanizado Tolerancias DimensionalesDocumento66 páginasMecanizado Tolerancias DimensionalesSara Escalera de la Iglesia100% (2)
- Engranajes HelicoidalesDocumento6 páginasEngranajes HelicoidalesLuisConterasAún no hay calificaciones
- Interruptor de Hexafluoruro de Azufre SF6Documento8 páginasInterruptor de Hexafluoruro de Azufre SF6Alex MeloAún no hay calificaciones
- Seminario Examen Final Calculo 3 2020-2 PDFDocumento3 páginasSeminario Examen Final Calculo 3 2020-2 PDFAnthony J. García ParedesAún no hay calificaciones
- Parte4QOIICompuestos CarboniloDocumento98 páginasParte4QOIICompuestos CarboniloCamila CastellanosAún no hay calificaciones
- Resumen Quimica Primer BloqueDocumento21 páginasResumen Quimica Primer BloqueFrancescaAún no hay calificaciones
- La Huella Del DiabloDocumento261 páginasLa Huella Del DiabloShant LomberaAún no hay calificaciones
- CARGADORDocumento25 páginasCARGADORHeart Sandler SandlerAún no hay calificaciones
- 733 WilliansDocumento13 páginas733 Williansjose perezAún no hay calificaciones
- Alternador de Flujo Axial Con Imanes PermanentesDocumento99 páginasAlternador de Flujo Axial Con Imanes Permanentesja632271100% (1)
- INEN Rosca Metrica ISO ToleranciasDocumento18 páginasINEN Rosca Metrica ISO ToleranciasJuan CarlosAún no hay calificaciones




























También podría gustarte
- Aplicaciones Del Álgebra Lineal en La Ingeniería en ComputaciónDocumento4 páginasAplicaciones Del Álgebra Lineal en La Ingeniería en ComputaciónDanilo Javier Mendez33% (3)
- Regulador Lineal Cuadrático OptimoDocumento7 páginasRegulador Lineal Cuadrático OptimoBru Cervantes AnayaAún no hay calificaciones
- 6to Lab LOU-IIDocumento8 páginas6to Lab LOU-IINilton LmlAún no hay calificaciones
- Ejercicios de ElectrodinámicaDocumento2 páginasEjercicios de ElectrodinámicaPercy Aranda Cera50% (2)
- Aplicaciones EAADocumento22 páginasAplicaciones EAAPaul ChavezAún no hay calificaciones
- Actividades Sobre Transformación de La EnergíaDocumento3 páginasActividades Sobre Transformación de La EnergíamelvinjrpichardoAún no hay calificaciones
- Práctica de Tubos ConcéntricosDocumento2 páginasPráctica de Tubos ConcéntricosmariajoserojasnietoAún no hay calificaciones
- Dupline Charla UniversidadDocumento46 páginasDupline Charla UniversidadSope Urrutia100% (1)
- Guia Resumen Carbono 2Documento4 páginasGuia Resumen Carbono 2Ricardo Antonio Muñoz PartuzaAún no hay calificaciones
- Trabajo Losas Armadas en Dos DireccionesDocumento59 páginasTrabajo Losas Armadas en Dos DireccionesEnmanuel Valero valeroAún no hay calificaciones
- Nano Celulosa - IntroduccionDocumento16 páginasNano Celulosa - IntroduccionAnahiAún no hay calificaciones
- CLASE5 EcuacionesYFormulasDocumento21 páginasCLASE5 EcuacionesYFormulasSamuel LopezAún no hay calificaciones
- Estudio Del Emplazamiento BioclimaticoDocumento6 páginasEstudio Del Emplazamiento BioclimaticoMaurizio Chipoco DiazAún no hay calificaciones
- Informe BalanceoDocumento8 páginasInforme BalanceoAndrés PulupaAún no hay calificaciones
- Cuestionario Nom-001-Stps-2008Documento13 páginasCuestionario Nom-001-Stps-2008DanielTrujilloAún no hay calificaciones
- Informe Infiltracion de SuelosDocumento5 páginasInforme Infiltracion de SuelosLuis AngelAún no hay calificaciones
- Archivo 202381321916Documento3 páginasArchivo 202381321916Damaris ZambranoAún no hay calificaciones
- Regresión y Correlación Lineal SimpleDocumento13 páginasRegresión y Correlación Lineal SimpleKayseniCenizarioDelCastillo100% (2)
- Brochure RCMDocumento6 páginasBrochure RCMjosevc317Aún no hay calificaciones
- Mecanizado Tolerancias DimensionalesDocumento66 páginasMecanizado Tolerancias DimensionalesSara Escalera de la Iglesia100% (2)
- Engranajes HelicoidalesDocumento6 páginasEngranajes HelicoidalesLuisConterasAún no hay calificaciones
- Interruptor de Hexafluoruro de Azufre SF6Documento8 páginasInterruptor de Hexafluoruro de Azufre SF6Alex MeloAún no hay calificaciones
- Seminario Examen Final Calculo 3 2020-2 PDFDocumento3 páginasSeminario Examen Final Calculo 3 2020-2 PDFAnthony J. García ParedesAún no hay calificaciones
- Parte4QOIICompuestos CarboniloDocumento98 páginasParte4QOIICompuestos CarboniloCamila CastellanosAún no hay calificaciones
- Resumen Quimica Primer BloqueDocumento21 páginasResumen Quimica Primer BloqueFrancescaAún no hay calificaciones
- La Huella Del DiabloDocumento261 páginasLa Huella Del DiabloShant LomberaAún no hay calificaciones
- CARGADORDocumento25 páginasCARGADORHeart Sandler SandlerAún no hay calificaciones
- 733 WilliansDocumento13 páginas733 Williansjose perezAún no hay calificaciones
- Alternador de Flujo Axial Con Imanes PermanentesDocumento99 páginasAlternador de Flujo Axial Con Imanes Permanentesja632271100% (1)
- INEN Rosca Metrica ISO ToleranciasDocumento18 páginasINEN Rosca Metrica ISO ToleranciasJuan CarlosAún no hay calificaciones