También podría gustarte
- PLA-SEG-001 - Plan de Preparacion y Respuesta A Emergencias.Documento26 páginasPLA-SEG-001 - Plan de Preparacion y Respuesta A Emergencias.Kenny Jiménez RuizAún no hay calificaciones
- Flujo de Proceso de Secado y Puerto-2015Documento2 páginasFlujo de Proceso de Secado y Puerto-2015Kenny Jiménez RuizAún no hay calificaciones
- Mapa de Riesgos de Procesos Planta Concentradora MiskiMayo 23 y 24 11Documento1 páginaMapa de Riesgos de Procesos Planta Concentradora MiskiMayo 23 y 24 11Kenny Jiménez RuizAún no hay calificaciones
- Sílabo Simulación y Juegos 2017-IIDocumento8 páginasSílabo Simulación y Juegos 2017-IIKenny Jiménez RuizAún no hay calificaciones
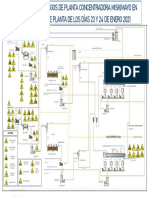
- Mapa de Riesgos FMD - Parada de Planta Concentradora Enero 21Documento1 páginaMapa de Riesgos FMD - Parada de Planta Concentradora Enero 21Kenny Jiménez RuizAún no hay calificaciones
- Copia de 4 - Formato para Ingreso-Salida de PertenenciasDocumento2 páginasCopia de 4 - Formato para Ingreso-Salida de PertenenciasKenny Jiménez RuizAún no hay calificaciones
- Tareo 31.08.2019Documento411 páginasTareo 31.08.2019Kenny Jiménez RuizAún no hay calificaciones
- 26.09.19 Observaciones Planeadas de Trabajo (Opt)Documento1 página26.09.19 Observaciones Planeadas de Trabajo (Opt)Kenny Jiménez RuizAún no hay calificaciones
- Tareos 14.07.19Documento712 páginasTareos 14.07.19Kenny Jiménez RuizAún no hay calificaciones
- FMD Brochure 2018Documento12 páginasFMD Brochure 2018Kenny Jiménez RuizAún no hay calificaciones
- Informe Topografía Alex AguirreDocumento21 páginasInforme Topografía Alex AguirreKenny Jiménez RuizAún no hay calificaciones
- Neupex PDFDocumento36 páginasNeupex PDFKenny Jiménez Ruiz100% (1)
- Documento Alcance Muestreo Relaves Rev 1Documento7 páginasDocumento Alcance Muestreo Relaves Rev 1Kenny Jiménez RuizAún no hay calificaciones
- Metrado de Barandas de TránsitoDocumento3 páginasMetrado de Barandas de TránsitoKenny Jiménez RuizAún no hay calificaciones
- Virus Hack - Sistemas de Transmisión InteligentesDocumento89 páginasVirus Hack - Sistemas de Transmisión InteligentesWesly DatumAún no hay calificaciones
- Laboratorio PLCDocumento17 páginasLaboratorio PLCKenny Jiménez RuizAún no hay calificaciones
- Aplicaciones de OpampDocumento6 páginasAplicaciones de OpampKenny Jiménez RuizAún no hay calificaciones
- Fuerza Magnetomotriz - Wikipedia, La Enciclopedia LibreDocumento2 páginasFuerza Magnetomotriz - Wikipedia, La Enciclopedia Libre4685752100% (1)
- FisicaDocumento2 páginasFisicaJesús García QuinteroAún no hay calificaciones
- Definicion de MagnetismoDocumento4 páginasDefinicion de MagnetismosantivaleAún no hay calificaciones
- Solucionario de Examen Parcial 3 CI 313Documento2 páginasSolucionario de Examen Parcial 3 CI 313Diego CuizaAún no hay calificaciones
- MERIAM Statics 7th-47-86.en - EsDocumento40 páginasMERIAM Statics 7th-47-86.en - EsANDRE ROSALES SAAVEDRAAún no hay calificaciones
- 2023.09.07 HAII USACH Clase04.1 Ejemplo Diseño FlexiónDocumento16 páginas2023.09.07 HAII USACH Clase04.1 Ejemplo Diseño FlexiónTomas Zamorano ArenasAún no hay calificaciones
- MartinezReyna VictorAlfonso M12S1AI6Documento6 páginasMartinezReyna VictorAlfonso M12S1AI6Victor Reyna “Alemakey”Aún no hay calificaciones
- Maquinas Electricas CompletoDocumento118 páginasMaquinas Electricas Completonicolas jaraba100% (4)
- Actividades Fundamentales III-3esoDocumento16 páginasActividades Fundamentales III-3esohymelproAún no hay calificaciones
- S10 s18 CinéticaDocumento44 páginasS10 s18 CinéticaRonal VilcasAún no hay calificaciones
- Practica 2.pérdida de CárgasDocumento5 páginasPractica 2.pérdida de CárgasRicardo Nnang Nguema NnangAún no hay calificaciones
- Ley de JouleDocumento4 páginasLey de JoulePaul Guillen PeñarretaAún no hay calificaciones
- Problemario Fisica NivelacionDocumento16 páginasProblemario Fisica NivelacionRosy_Aguilar0% (1)
- Consolidacion Lab2Documento8 páginasConsolidacion Lab2Victor Sulca PucaAún no hay calificaciones
- Trabajo-Tarea04 1Documento18 páginasTrabajo-Tarea04 1Oscar Paul Chambi NunezAún no hay calificaciones
- MF Lab 2 Vis Liq Ley StokesDocumento19 páginasMF Lab 2 Vis Liq Ley StokesMiaa09Aún no hay calificaciones
- Semana 11.2. Conservación de La Cantidad de Movimiento.Documento7 páginasSemana 11.2. Conservación de La Cantidad de Movimiento.Ministerio Santiago ApostolAún no hay calificaciones
- Laboratorio de PandeoDocumento7 páginasLaboratorio de PandeoPaulinaBahamón100% (1)
- Tablas de KalmanokDocumento17 páginasTablas de KalmanokDavid ChapmanAún no hay calificaciones
- Preinforme Practica #2 ColisionesDocumento6 páginasPreinforme Practica #2 ColisionesJarley DuarteAún no hay calificaciones
- MAPA Conceptual HidrodinamicaDocumento2 páginasMAPA Conceptual HidrodinamicaIvan Nicolas de los Santos100% (2)
- Maestría Metálicas - Caíitulo 9 Diseño de Vigas Por MomentosDocumento24 páginasMaestría Metálicas - Caíitulo 9 Diseño de Vigas Por MomentosWPMTAún no hay calificaciones
- Diseños de ColumnasDocumento11 páginasDiseños de Columnasanon_829734596Aún no hay calificaciones
- Ecuación General de La EnergiaDocumento14 páginasEcuación General de La EnergiaFernando Stuar Campos Mendoza0% (1)
- 6° Basico Ciencias Naturales Calor y TemperaturaDocumento13 páginas6° Basico Ciencias Naturales Calor y TemperaturaYula MorónAún no hay calificaciones
- Diptico CtaDocumento2 páginasDiptico CtaLuis CastilloAún no hay calificaciones
- RM-Propiedades Mecánicas de Los MaterialesDocumento11 páginasRM-Propiedades Mecánicas de Los MaterialesNick AmayaAún no hay calificaciones
- Las Estructuras (II)Documento53 páginasLas Estructuras (II)Rosa Angella Saavedra ObregonAún no hay calificaciones
- Calor EspecificoDocumento4 páginasCalor EspecificoYourladys ElenaAún no hay calificaciones