También podría gustarte
- Aprender Arduino, electrónica y programación con 100 ejercicios prácticosDe EverandAprender Arduino, electrónica y programación con 100 ejercicios prácticosCalificación: 4.5 de 5 estrellas4.5/5 (14)
- Simulación de circuitos electrónicos con OrCAD® PSpice®De EverandSimulación de circuitos electrónicos con OrCAD® PSpice®Aún no hay calificaciones
- Ejercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiDe EverandEjercicios prácticos con Electrónica: Proyectos de electrónica con Arduino y Raspberry PiCalificación: 5 de 5 estrellas5/5 (1)
- Aplicación Del Razonamiento Jurídico A La Cibernética-El Fenómeno CibernéticoDocumento4 páginasAplicación Del Razonamiento Jurídico A La Cibernética-El Fenómeno CibernéticoAli Serrano100% (1)
- Manual de Configuración y Operación Del Sistema de Clasificación de Fruta SC7182eDocumento100 páginasManual de Configuración y Operación Del Sistema de Clasificación de Fruta SC7182eGilmer Socon ApenAún no hay calificaciones
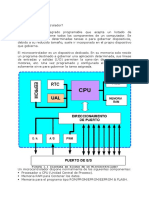
- P04 Hola Mundo Con PIC18F4550Documento15 páginasP04 Hola Mundo Con PIC18F4550Pamela Pacheco CabezasAún no hay calificaciones
- PIC 16f877Documento7 páginasPIC 16f877Andreina ArmasAún no hay calificaciones
- Pic 17Documento7 páginasPic 17Carlos San EzAún no hay calificaciones
- Descripcion PicDocumento10 páginasDescripcion PicSaraAún no hay calificaciones
- Micro Control Adores El Pic16f877a El Tutorial 100Documento24 páginasMicro Control Adores El Pic16f877a El Tutorial 100shinseiky100% (1)
- Presentacion PicDocumento52 páginasPresentacion PicjosephAún no hay calificaciones
- El PIC16F877Documento8 páginasEl PIC16F877carlosAún no hay calificaciones
- PIC16F876Documento157 páginasPIC16F876lortiva100% (2)
- ESTRUCTURA DEL 16F877A WebDocumento10 páginasESTRUCTURA DEL 16F877A WebErnesto Zayas OlguinAún no hay calificaciones
- Manual Pic16f87x PDFDocumento79 páginasManual Pic16f87x PDFJORGE ARROYOAún no hay calificaciones
- Tutorial PIC16F877A (Algunas Mejoras)Documento26 páginasTutorial PIC16F877A (Algunas Mejoras)rodrick7790% (10)
- Tutorial PIC16F877A Algunas MejorasDocumento26 páginasTutorial PIC16F877A Algunas MejorasJose Luis Sovero AstoamanAún no hay calificaciones
- Pic 16f628a CaracteristicasDocumento17 páginasPic 16f628a CaracteristicasSebastian Moreno CamposAún no hay calificaciones
- PICDocumento53 páginasPICRosemberg Torres DominguezAún no hay calificaciones
- PIC16F84Documento9 páginasPIC16F84TREJO LEON LUIS ALEJANDROAún no hay calificaciones
- Para Que Nuestro Pic Funcione FísicamenteDocumento7 páginasPara Que Nuestro Pic Funcione FísicamenteAna Suggey100% (1)
- Caracteristicas Del Pic16f84aDocumento20 páginasCaracteristicas Del Pic16f84aGiancarlo Villanueva OropezaAún no hay calificaciones
- Dispositivos Lógicos Microprogramables Pic16f84Documento34 páginasDispositivos Lógicos Microprogramables Pic16f84Momito GarcíaAún no hay calificaciones
- 1 Microcontrolador Pic 16f877aDocumento9 páginas1 Microcontrolador Pic 16f877aGabriel UrrutiaAún no hay calificaciones
- Descripcion Pic 16F877ADocumento9 páginasDescripcion Pic 16F877AAndres Camilo RubianoAún no hay calificaciones
- PIC16F877 ResumenDocumento22 páginasPIC16F877 ResumenCarlosperezmAún no hay calificaciones
- Act Central U2Documento9 páginasAct Central U2Juan Camilo Gonsalez RozzoAún no hay calificaciones
- Caracteristicas Del Pic 16f628aDocumento16 páginasCaracteristicas Del Pic 16f628aBaños Otrebeh33% (3)
- Ensayo Datasheet PIC 16F877Documento5 páginasEnsayo Datasheet PIC 16F877Santiago CorreaAún no hay calificaciones
- Comunicación RS232Documento10 páginasComunicación RS232jbrunobAún no hay calificaciones
- DEBER 1 MicrocontroladoresDocumento11 páginasDEBER 1 MicrocontroladoresTefys FloresAún no hay calificaciones
- Curso Microcontroladores PIC en BASICDocumento5 páginasCurso Microcontroladores PIC en BASICelectronica avanzadaAún no hay calificaciones
- Diseño de Productos Electrónicos Con Microcontroladores Act 2Documento10 páginasDiseño de Productos Electrónicos Con Microcontroladores Act 2Yeeko ContrerasAún no hay calificaciones
- S02.s4 - Arquitectura Del PIC 18F4550 Parte 3Documento10 páginasS02.s4 - Arquitectura Del PIC 18F4550 Parte 3mavis lopezAún no hay calificaciones
- Paso 5 Componente Practico - Edinson Medina - 309696 - 15Documento26 páginasPaso 5 Componente Practico - Edinson Medina - 309696 - 15Edinson Medina RiveraAún no hay calificaciones
- Lab - 1 - Configuración de Puertos IO Pic18F4550Documento10 páginasLab - 1 - Configuración de Puertos IO Pic18F4550JUAN DIAZ MAMANIAún no hay calificaciones
- Componente Practico - Camilo MejiaDocumento26 páginasComponente Practico - Camilo MejiaCamilo Andres Mejia galeanoAún no hay calificaciones
- Microprocesador PicDocumento8 páginasMicroprocesador PicYonni RosasAún no hay calificaciones
- At89c2051 BuenoDocumento21 páginasAt89c2051 BuenoAntonio MontalvoAún no hay calificaciones
- Caracteristicas Del Pic 16f628aDocumento16 páginasCaracteristicas Del Pic 16f628aLuis RamirezAún no hay calificaciones
- Act Central U2 ResueltaDocumento8 páginasAct Central U2 ResueltaAgustin Francisco Montaño100% (1)
- Desarrollo A Las Actividades de La Semana 2 de Diseno de Productos Electronicos Con Microcontroladores AutoguardadoDocumento14 páginasDesarrollo A Las Actividades de La Semana 2 de Diseno de Productos Electronicos Con Microcontroladores AutoguardadoOMAR YESID MARTINEZ PENAAún no hay calificaciones
- U5 - Puertos IO Del Pic18F4550Documento10 páginasU5 - Puertos IO Del Pic18F4550Roberto GarcíaAún no hay calificaciones
- PIC16F873 v1Documento22 páginasPIC16F873 v1Mary RodríguezAún no hay calificaciones
- Solucion Actividad Central 2Documento10 páginasSolucion Actividad Central 2williamAún no hay calificaciones
- Pic 18F4550Documento28 páginasPic 18F4550Yazz Correa MnAún no hay calificaciones
- Microcontroladores 3.1Documento10 páginasMicrocontroladores 3.1Andres SepulvedaAún no hay calificaciones
- Familia PICDocumento9 páginasFamilia PICkamilo EsperandoAún no hay calificaciones
- Clase 01 - Introducción A Los DspicDocumento26 páginasClase 01 - Introducción A Los DspicMarcos TiconaAún no hay calificaciones
- GPSGSMPIC1Documento153 páginasGPSGSMPIC1Jeison Ivan AlvaradoAún no hay calificaciones
- Act Central U2Documento6 páginasAct Central U2Jesus Ortiz0% (3)
- Puertos de Entrada y SalidaDocumento10 páginasPuertos de Entrada y SalidaAndres Raul Diaz PeñaAún no hay calificaciones
- Clase 9 El MICROCONTROLADOR - Familia PIC 16xxxDocumento28 páginasClase 9 El MICROCONTROLADOR - Familia PIC 16xxxMilton100% (2)
- Conversor AD Del DsPIC30F4013Documento11 páginasConversor AD Del DsPIC30F4013xxgino999xxxAún no hay calificaciones
- Características Ventajas y Desventajas Del MicrocontroladorDocumento9 páginasCaracterísticas Ventajas y Desventajas Del MicrocontroladorXavierMartinez50% (2)
- Características Del PIC16F84ADocumento27 páginasCaracterísticas Del PIC16F84AOrlando GirónAún no hay calificaciones
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- 100 Circuitos de Audio (ES) - volume 1De Everand100 Circuitos de Audio (ES) - volume 1Calificación: 5 de 5 estrellas5/5 (2)
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaAún no hay calificaciones
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosCalificación: 5 de 5 estrellas5/5 (5)
- 100 Circuitos de Shields para MotoresDe Everand100 Circuitos de Shields para MotoresCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Version Resumida-Plan de Estudio-Analisis de SistemasDocumento12 páginasVersion Resumida-Plan de Estudio-Analisis de SistemasMariel SanabriaAún no hay calificaciones
- What Can Zerto Do For You Spanish VersionDocumento1 páginaWhat Can Zerto Do For You Spanish VersionRodof GutierrAún no hay calificaciones
- Script PSP0 Plan Del Proyecto y Log Del TiempoDocumento11 páginasScript PSP0 Plan Del Proyecto y Log Del TiempoSergio KastroAún no hay calificaciones
- Compendios de Algoritmos y Diagramas de FlujosDocumento68 páginasCompendios de Algoritmos y Diagramas de FlujosClaudio FernandoAún no hay calificaciones
- Material Capítulo I. INF-101Documento16 páginasMaterial Capítulo I. INF-101MabelAún no hay calificaciones
- Algoritmos - Lista de CotejoDocumento14 páginasAlgoritmos - Lista de Cotejopyp4yAún no hay calificaciones
- Terminal - PC101 Price Checker - Brochure - EsDocumento9 páginasTerminal - PC101 Price Checker - Brochure - EsDonny Huaman NovoaAún no hay calificaciones
- Actividad de Reflexion0.1Documento3 páginasActividad de Reflexion0.1Laura HuertasAún no hay calificaciones
- Comunicación RS232Documento10 páginasComunicación RS232jbrunobAún no hay calificaciones
- Unidad III Registros (Ultimo)Documento46 páginasUnidad III Registros (Ultimo)VanAún no hay calificaciones
- (0001) Manual de Diseño PDFDocumento8 páginas(0001) Manual de Diseño PDFDennisse FariasAún no hay calificaciones
- Backup CloudDocumento6 páginasBackup CloudNicolas RiveraAún no hay calificaciones
- Descripcion Del Polideportivo San Juan BoscoDocumento3 páginasDescripcion Del Polideportivo San Juan BoscoŘoger ÂrroyoAún no hay calificaciones
- Temario Presión ConstanteDocumento3 páginasTemario Presión ConstanteDenis RodriguezAún no hay calificaciones
- Infografía Inteligencia Artificial Moderno NegroDocumento2 páginasInfografía Inteligencia Artificial Moderno NegroLucho MasterAún no hay calificaciones
- Actividad 6 Herramienta ExcelDocumento6 páginasActividad 6 Herramienta Excelyubeilys altamarAún no hay calificaciones
- Notas Programacion en JAVADocumento3 páginasNotas Programacion en JAVAEison PaoloAún no hay calificaciones
- SodelscotDocumento9 páginasSodelscotZain Ivan Martinez TaipeAún no hay calificaciones
- Piad 210 AlumnotrabajofinalDocumento7 páginasPiad 210 AlumnotrabajofinalPaololAún no hay calificaciones
- Actividad-3 Busqueda de Actualizacion de Firmware de UEFI o BIOSDocumento3 páginasActividad-3 Busqueda de Actualizacion de Firmware de UEFI o BIOSYony Guerra ConejoAún no hay calificaciones
- La Desmitificacio CC 81n de KubernetesDocumento7 páginasLa Desmitificacio CC 81n de KubernetesMarino ChimalAún no hay calificaciones
- Algoritmos PresentaciónDocumento15 páginasAlgoritmos PresentaciónLizeth OsunaAún no hay calificaciones
- Muestreo de Señales en PythonDocumento7 páginasMuestreo de Señales en PythonAngel HernandezAún no hay calificaciones
- Puertos y ConectoresDocumento24 páginasPuertos y ConectoresKaren Julieth Nino BarcoAún no hay calificaciones
- Introducción SODocumento10 páginasIntroducción SOAnonymous gN7yOvfRaXAún no hay calificaciones
- UTP Malla Ing SofwareDocumento1 páginaUTP Malla Ing SofwareFrank VOAún no hay calificaciones
- Sigeps ArequipaDocumento42 páginasSigeps ArequipaCc LinetAún no hay calificaciones
- Creación de Ïndices - Arboles B y Tablas de HashingDocumento22 páginasCreación de Ïndices - Arboles B y Tablas de Hashingoscar hinnojosaAún no hay calificaciones