También podría gustarte
- Ec - Dif. Clase 1 2 3 4Documento165 páginasEc - Dif. Clase 1 2 3 4Randall MarinAún no hay calificaciones
- Ec. Dif.2021 - CLASE 1Documento64 páginasEc. Dif.2021 - CLASE 1Aaron RomeroAún no hay calificaciones
- Paso 2 - Ecuaciones Diferenciales Grupo1Documento35 páginasPaso 2 - Ecuaciones Diferenciales Grupo1IbethPaezAún no hay calificaciones
- Historia de Las Ecuaciones DiferencialesDocumento14 páginasHistoria de Las Ecuaciones DiferencialesAxel Ivan Pilco Estrada100% (1)
- Historia Ecuaciones Diferenciales 170405131233Documento17 páginasHistoria Ecuaciones Diferenciales 170405131233A-Mishel RivasplataAún no hay calificaciones
- Orígenes de Las Ecuaciones DiferencialesDocumento8 páginasOrígenes de Las Ecuaciones DiferencialesLuis EspinozaAún no hay calificaciones
- Calculo 2Documento21 páginasCalculo 2Adrian ValdiviaAún no hay calificaciones
- Historia de Las Ecuaciones DiferencialesDocumento36 páginasHistoria de Las Ecuaciones DiferencialesMariano RodriguezAún no hay calificaciones
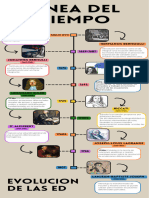
- Act 2 Linea Del Tiempo Historia de Las Ecuaciones DiferencialesDocumento3 páginasAct 2 Linea Del Tiempo Historia de Las Ecuaciones DiferencialesPatty Sarmiento75% (8)
- Historia de Las Ecuaciones DiferencialesDocumento14 páginasHistoria de Las Ecuaciones DiferencialesJorge Joel Espejo Gutierrez100% (1)
- ECUACIONES DIFERENCIALES ACTIVIDAD INTRODUCTORIA 2023-I - Maria MurilloDocumento8 páginasECUACIONES DIFERENCIALES ACTIVIDAD INTRODUCTORIA 2023-I - Maria MurilloMaria Monica Murillo RinconAún no hay calificaciones
- Proyecto - Docx MateDocumento24 páginasProyecto - Docx MateMaribi AranaAún no hay calificaciones
- Historia de Las Ecuaciones Diferenciales - Wikipedia, La Enciclopedia LibreDocumento39 páginasHistoria de Las Ecuaciones Diferenciales - Wikipedia, La Enciclopedia LibreJohn AcevedoAún no hay calificaciones
- Trabajo Contextualizado FinalDocumento7 páginasTrabajo Contextualizado FinalMaikol Rodriguez VegaAún no hay calificaciones
- Historia de Las Ecuaciones DiferencialesDocumento9 páginasHistoria de Las Ecuaciones DiferencialesJhon Edward Duran100% (2)
- Historia de Las Ecuaciones DiferencialesDocumento6 páginasHistoria de Las Ecuaciones DiferencialesRodrigo Paucar AedoAún no hay calificaciones
- Ecuaciones DiferencialesDocumento2 páginasEcuaciones DiferencialesJessy LuAún no hay calificaciones
- E.D Actividad # 1Documento5 páginasE.D Actividad # 1Hernan Angulo BobadilloAún no hay calificaciones
- Ecuaciones Diferenciales. Uneg. Ing. Informatica. Becerra StephanieDocumento3 páginasEcuaciones Diferenciales. Uneg. Ing. Informatica. Becerra StephanieStephanie GraceAún no hay calificaciones
- Ecuaciones Diferenciales RonaldDocumento9 páginasEcuaciones Diferenciales RonaldRonaldAún no hay calificaciones
- Ecuación Diferencial - Wikipedia, La Enciclopedia LibreDocumento16 páginasEcuación Diferencial - Wikipedia, La Enciclopedia Librejoseamh69062247Aún no hay calificaciones
- Ecuaciones Diferenciales Ordinarias PDFDocumento13 páginasEcuaciones Diferenciales Ordinarias PDFVictor Antonio Rojas RojasAún no hay calificaciones
- Origen de Las Ecuaciones DiferencialesDocumento7 páginasOrigen de Las Ecuaciones DiferencialesEdi Mejia CAún no hay calificaciones
- Historia de Las Ecuaciones Diferenciales Ordinarias TraducciónDocumento5 páginasHistoria de Las Ecuaciones Diferenciales Ordinarias TraducciónJuanitaAún no hay calificaciones
- Ecuación Diferencial Ing STWDocumento16 páginasEcuación Diferencial Ing STWWilmer Bolivar Imba BeceAún no hay calificaciones
- Historia Ecuaciones DiferencialesDocumento17 páginasHistoria Ecuaciones DiferencialesIsaí Yarí Medina100% (1)
- Apuntes. Historia Ecuaciones Diferenciales. Metodos Numericos. Miguel FloresDocumento4 páginasApuntes. Historia Ecuaciones Diferenciales. Metodos Numericos. Miguel FloresJosé I. HernándezAún no hay calificaciones
- Ecuaciones IntroDocumento18 páginasEcuaciones IntroELVISS COCHOAún no hay calificaciones
- Historia de Las Ecuaciones DiferencialesDocumento1 páginaHistoria de Las Ecuaciones Diferencialesalejandro mendez vegaAún no hay calificaciones
- Practica 111qDocumento8 páginasPractica 111qmisaelAún no hay calificaciones
- Historia de Las IsoclinasDocumento2 páginasHistoria de Las IsoclinasCarlos PeñalvaAún no hay calificaciones
- Notas HistoricasDocumento1 páginaNotas HistoricasCHRISTIAN DAVID CHAVEZ CALEROAún no hay calificaciones
- Historia de Las Ecuaciones Diferenciales y Personas Quienes Aportaron A EstaDocumento2 páginasHistoria de Las Ecuaciones Diferenciales y Personas Quienes Aportaron A Estaclaudia pfoccori querarAún no hay calificaciones
- Ecuaciones DiferencialesDocumento5 páginasEcuaciones DiferencialesCristian NovoaAún no hay calificaciones
- Ecuaciones DiferencialesDocumento12 páginasEcuaciones DiferencialesEddy ZacariasAún no hay calificaciones
- Conceptos PreliminaresDocumento4 páginasConceptos PreliminaresCarlitos ColdAún no hay calificaciones
- INFORME EDO WronskianoDocumento11 páginasINFORME EDO WronskianoXavier MoralesAún no hay calificaciones
- Calculo DiferencialDocumento11 páginasCalculo DiferencialANAAún no hay calificaciones
- Historia de Las Ecuaciones DiferencialesDocumento7 páginasHistoria de Las Ecuaciones DiferencialesMiireia HernandezAún no hay calificaciones
- Wd. Ecuacion de Las Cuerdas VibrantesDocumento23 páginasWd. Ecuacion de Las Cuerdas VibrantesMIGUEL VIGILAún no hay calificaciones
- Ecuaciones Diferenciales Actividad Introductoria 2021-IDocumento3 páginasEcuaciones Diferenciales Actividad Introductoria 2021-Ialvaro vargas caballeroAún no hay calificaciones
- Inf 1 GRUPO2Documento33 páginasInf 1 GRUPO2C Geramias MoralesAún no hay calificaciones
- Historia Del Calculo D y IDocumento7 páginasHistoria Del Calculo D y IyaffetAún no hay calificaciones
- Anscripción de PRINCIPALES PRECURSORES DEL CALCULO DIFERENCIALDocumento3 páginasAnscripción de PRINCIPALES PRECURSORES DEL CALCULO DIFERENCIALRamses VCAún no hay calificaciones
- Ecuaciones 1Documento6 páginasEcuaciones 1Alvaro CcapatintaAún no hay calificaciones
- Ecuación PDFDocumento11 páginasEcuación PDFIrian ReyesAún no hay calificaciones
- Infografia Línea Del Tiempo EDDocumento2 páginasInfografia Línea Del Tiempo EDDeisy Medina GómezAún no hay calificaciones
- Historia Series FourierDocumento9 páginasHistoria Series FourierPauli BravoAún no hay calificaciones
- Línea Del Tiempo Del Cálculo DiferencialDocumento6 páginasLínea Del Tiempo Del Cálculo DiferencialAngel ChavezAún no hay calificaciones
- RgrtyDocumento8 páginasRgrtyOSCAR GUIOBANNI GUILLEN ALBORNOZAún no hay calificaciones
- EcuacionesDocumento5 páginasEcuacionesCetpro Santa Vicenta MaríaAún no hay calificaciones
- Principales Precursores Del Calculo DiferencialDocumento2 páginasPrincipales Precursores Del Calculo Diferencialjeferson gutierritos67% (3)
- Historia de Las Ecuaciones DiferencialesDocumento6 páginasHistoria de Las Ecuaciones DiferencialesAntonio Javier Pérez NavarroAún no hay calificaciones
- Metodo de Fluxiones de NewtonDocumento24 páginasMetodo de Fluxiones de NewtonJaviermetalrock100% (6)
- Origenes de Las Ecuaciones DiferencialesDocumento15 páginasOrigenes de Las Ecuaciones DiferencialesHarol Yancare YanceAún no hay calificaciones
- Ecuacion de Las Cuerdas VibrantesDocumento26 páginasEcuacion de Las Cuerdas VibrantesMIGUEL VIGILAún no hay calificaciones
- Trabajo de Algebra DeterminantesDocumento46 páginasTrabajo de Algebra DeterminantesChristian Coronel TAún no hay calificaciones
- Historia de Las Ecuaciones DiferencialesDocumento7 páginasHistoria de Las Ecuaciones DiferencialesEduardo GutierrezAún no hay calificaciones
- Solubilidad de ecuaciones elípticas y parabólicasDe EverandSolubilidad de ecuaciones elípticas y parabólicasAún no hay calificaciones
- Quimica pc1Documento12 páginasQuimica pc1Manzur Arturo Rosado SilvaAún no hay calificaciones
- Manual de Proteus Basico (Actualizado)Documento36 páginasManual de Proteus Basico (Actualizado)Manzur Arturo Rosado SilvaAún no hay calificaciones
- Hidrología SubterráneaDocumento4 páginasHidrología SubterráneaManzur Arturo Rosado SilvaAún no hay calificaciones
- Practica Dirigida 2Documento2 páginasPractica Dirigida 2Manzur Arturo Rosado SilvaAún no hay calificaciones
- Semana 5a Proporcionalidad Teoría Pre 2021Documento26 páginasSemana 5a Proporcionalidad Teoría Pre 2021Manzur Arturo Rosado SilvaAún no hay calificaciones
- Semana 3b Cuadriláteros Teoría Pre 2021Documento39 páginasSemana 3b Cuadriláteros Teoría Pre 2021Manzur Arturo Rosado SilvaAún no hay calificaciones
- Semana 4a Circunferencia Teoría Pre 2021Documento23 páginasSemana 4a Circunferencia Teoría Pre 2021Manzur Arturo Rosado SilvaAún no hay calificaciones
- Semana 4b Ángulos en La Circunferencia Teoría Pre 2021Documento36 páginasSemana 4b Ángulos en La Circunferencia Teoría Pre 2021Manzur Arturo Rosado SilvaAún no hay calificaciones
- Semana 04 - Leyes de NewtonDocumento20 páginasSemana 04 - Leyes de NewtonManzur Arturo Rosado SilvaAún no hay calificaciones
- PROCESOS SOLIFICACION - Grupo 1Documento11 páginasPROCESOS SOLIFICACION - Grupo 1Max YupanquiAún no hay calificaciones
- Alcantarillas y DrenesDocumento15 páginasAlcantarillas y DrenesAndrea Camila Ramos AraujoAún no hay calificaciones
- 01-Nomenclatura InorganicaDocumento24 páginas01-Nomenclatura InorganicaRUBENS IVAAún no hay calificaciones
- Partes de La Cabeza Y Sus Divisiones Divisiones de Cabello: PlanchaDocumento13 páginasPartes de La Cabeza Y Sus Divisiones Divisiones de Cabello: PlanchaARELI MENAAún no hay calificaciones
- Determinación Del Contenido de Materia Orgánica Oxidable de Un Suelo Por El Método Del Permanganato de PotasioDocumento3 páginasDeterminación Del Contenido de Materia Orgánica Oxidable de Un Suelo Por El Método Del Permanganato de PotasioIsaias GuerreroAún no hay calificaciones
- Manual Filtros ArenaDocumento20 páginasManual Filtros ArenaSaúl LópezAún no hay calificaciones
- Hs SG Limpiador Desinfectante Hs-pn-051Documento3 páginasHs SG Limpiador Desinfectante Hs-pn-051Briant BravoAún no hay calificaciones
- Examen Final 2020 IDocumento2 páginasExamen Final 2020 IElian Herrera LeonAún no hay calificaciones
- BIOMATERIALES Unidos Somos MasDocumento96 páginasBIOMATERIALES Unidos Somos MasGabriela Fajardo100% (1)
- Coagulacion Floculacon 5500457-5500370Documento10 páginasCoagulacion Floculacon 5500457-5500370daniel gAún no hay calificaciones
- Elaboracion de BetunDocumento10 páginasElaboracion de BetunKaren MadelyneAún no hay calificaciones
- PSST-06 Procedimiento Gestion Riesgo QuimicoDocumento9 páginasPSST-06 Procedimiento Gestion Riesgo QuimicoTransportes DAL S.A.SAún no hay calificaciones
- Metales AlcalinosDocumento7 páginasMetales AlcalinosLuis Leonardo Carreño Torres100% (1)
- 3er Examen Alg Lineal 22ADocumento2 páginas3er Examen Alg Lineal 22AEric said Jimenez lopezAún no hay calificaciones
- Acidez y BasicidadDocumento78 páginasAcidez y BasicidadnelsAún no hay calificaciones
- Catalisis - Tapia Medina TeresitaDocumento19 páginasCatalisis - Tapia Medina TeresitaTeresita tapiaAún no hay calificaciones
- Aceite MineralDocumento17 páginasAceite MineralAlejandraAún no hay calificaciones
- Prueba Bio 2Documento9 páginasPrueba Bio 2AMAHIRANY ANDRADEAún no hay calificaciones
- Red de Aire Comprimido para TallerDocumento6 páginasRed de Aire Comprimido para TallercristianAún no hay calificaciones
- Catálogo - El Drago - 2023Documento8 páginasCatálogo - El Drago - 2023Diego AparcedoAún no hay calificaciones
- Doal Fondo PX Chocolate PDFDocumento1 páginaDoal Fondo PX Chocolate PDFASIMETRONAún no hay calificaciones
- Punto de EbullicionDocumento3 páginasPunto de EbullicionDhaya SanabriaAún no hay calificaciones
- Exposicion PiñaDocumento2 páginasExposicion PiñaKaterin CalleAún no hay calificaciones
- Metalurgia Extractiva Guia de Clase PDFDocumento98 páginasMetalurgia Extractiva Guia de Clase PDFMiguel Angel Madera RicardoAún no hay calificaciones
- Dosificación Del Sulfato de AluminioDocumento2 páginasDosificación Del Sulfato de AluminioLaboratorio y Control de Calidad Planta ProAún no hay calificaciones
- Informe 6Documento9 páginasInforme 6miguel ariasAún no hay calificaciones
- Grupo8 - Tipos de Concreto y Características de Sus Mezclas, Comportamiento Del ConcretoDocumento17 páginasGrupo8 - Tipos de Concreto y Características de Sus Mezclas, Comportamiento Del ConcretoFLAVIO CESAR DE LA CRUZ MENDOZAAún no hay calificaciones
- Manual de Refrigeracion Comercial Basica Parte 2Documento19 páginasManual de Refrigeracion Comercial Basica Parte 2INSTRUMECA OCCIDENTEAún no hay calificaciones
- SESIÓN DE APRENDIZAJE N°2 - Acidos Oxacidos e HidracidosDocumento13 páginasSESIÓN DE APRENDIZAJE N°2 - Acidos Oxacidos e Hidracidosjimmy luis aquije rojasAún no hay calificaciones
- MSDS Cat - Interpoxy Primer 885 ALDocumento6 páginasMSDS Cat - Interpoxy Primer 885 ALHector MacavilcaAún no hay calificaciones