También podría gustarte
- Propuesta AseoDocumento13 páginasPropuesta AseoJOHN JENNER BERMUDEZ OSPINAAún no hay calificaciones
- H11130 - EN FlexIS UC2 - Instruction Manual (011-059) - 1584673255569 PDFDocumento98 páginasH11130 - EN FlexIS UC2 - Instruction Manual (011-059) - 1584673255569 PDFJuliana CobosAún no hay calificaciones
- Historia de La EstadísticaDocumento4 páginasHistoria de La EstadísticaAngel Sanchez100% (1)
- Educación Secundaria: Plan de Reforzamiento para El Período Extraordinario de RecuperaciónDocumento359 páginasEducación Secundaria: Plan de Reforzamiento para El Período Extraordinario de RecuperaciónFredy Adolfo García100% (1)
- COMPORTAMIENTO AGRONÓMICO DE TRES VARIEDADES DE ARVEJA (Pisum Sativum), CON LA APLICACIÓN DE INOCULANTE DE (Rhizobium) EN LA COMUNIDAD DE CARMEN PAMPA, PROVINCIA NOR YUNGAS DEL DEPARTAMENTO DE LA PAZ.Documento33 páginasCOMPORTAMIENTO AGRONÓMICO DE TRES VARIEDADES DE ARVEJA (Pisum Sativum), CON LA APLICACIÓN DE INOCULANTE DE (Rhizobium) EN LA COMUNIDAD DE CARMEN PAMPA, PROVINCIA NOR YUNGAS DEL DEPARTAMENTO DE LA PAZ.Luis Paucara Fernández0% (1)
- Liderazgo PolicialDocumento172 páginasLiderazgo PolicialJHONFREDYCAún no hay calificaciones
- Temas Del Curriculo Priorizado de EEFF para El Primer ProyectoDocumento2 páginasTemas Del Curriculo Priorizado de EEFF para El Primer ProyectoCJ VélizAún no hay calificaciones
- Esquema Del Proyecto InterdisciplinarDocumento2 páginasEsquema Del Proyecto InterdisciplinarCJ VélizAún no hay calificaciones
- Subactividad 2.1.23Documento1 páginaSubactividad 2.1.23CJ VélizAún no hay calificaciones
- Proyecto 6 - Semana 2 - DecimoDocumento3 páginasProyecto 6 - Semana 2 - DecimoCJ VélizAún no hay calificaciones
- Acido Cloridrico - 00173Documento7 páginasAcido Cloridrico - 00173PABLO FIGUEROA CARDENASAún no hay calificaciones
- Literatura VanguardistaDocumento9 páginasLiteratura VanguardistanikoooolAún no hay calificaciones
- Desafíos e Intereses Profesionales - APPFinal - FinalDocumento4 páginasDesafíos e Intereses Profesionales - APPFinal - FinalJAVIERA IGNACIA GUTIERREZ NAVARROAún no hay calificaciones
- Sindromes Afectivos - Aura YepesDocumento60 páginasSindromes Afectivos - Aura YepesAura Yepes SarmientoAún no hay calificaciones
- PRONACEV - Incidencia en La Construcción Social Del TerritorioDocumento6 páginasPRONACEV - Incidencia en La Construcción Social Del TerritorioAguilar ArquitecturaAún no hay calificaciones
- Definición de BitácoraDocumento3 páginasDefinición de Bitácora22021857Aún no hay calificaciones
- Asignación FamiliarDocumento8 páginasAsignación FamiliarAlvaro López TorresAún no hay calificaciones
- Medidas de Posicion (Cuantiles)Documento13 páginasMedidas de Posicion (Cuantiles)MARIA CAMILA CERON AVIRAMAAún no hay calificaciones
- La Magnifica Civilizacion MayaDocumento6 páginasLa Magnifica Civilizacion MayaM MAún no hay calificaciones
- Mapa Conceptual Audio - Milusca Quispe CconchoyDocumento5 páginasMapa Conceptual Audio - Milusca Quispe CconchoyEdith ColqueAún no hay calificaciones
- Batchim YsaludosDocumento5 páginasBatchim YsaludosDayanne EvansAún no hay calificaciones
- 010 Equipos y Accesorios Sumergibles.160219-170000Documento153 páginas010 Equipos y Accesorios Sumergibles.160219-170000J L López MartínezAún no hay calificaciones
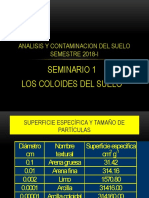
- S1 Coloides Del SueloDocumento25 páginasS1 Coloides Del SueloEduardo Sanchez CarriónAún no hay calificaciones
- Guia de Marketing Digital para GimnasiosDocumento22 páginasGuia de Marketing Digital para GimnasiosBlanca VLAún no hay calificaciones
- Mapa ConceptualDocumento1 páginaMapa ConceptualDash DashAún no hay calificaciones
- Programa 532008Documento2 páginasPrograma 532008Alejandro White PerMolAún no hay calificaciones
- Definición OperacionalDocumento4 páginasDefinición OperacionalYapu ChuraAún no hay calificaciones
- El CaciqueDocumento2 páginasEl CaciqueAnahis CardenasAún no hay calificaciones
- Ejercicio #1Documento1 páginaEjercicio #1Florent MarchenaAún no hay calificaciones
- Grupo de Actividades Regimen Simple de TributacionDocumento21 páginasGrupo de Actividades Regimen Simple de Tributacionpasajes m&a serviceAún no hay calificaciones
- Sistemas Neumaticos y OleohidraulicosDocumento84 páginasSistemas Neumaticos y OleohidraulicosKevin Siavichay100% (2)
- Armand FeigenbaumDocumento13 páginasArmand FeigenbaumJohn AlexanderAún no hay calificaciones
- Modelo Entidad - RelaciónDocumento1 páginaModelo Entidad - RelaciónGeometry DashAún no hay calificaciones
- Los Textos LiterariosDocumento21 páginasLos Textos LiterariosOscar PrimoAún no hay calificaciones