También podría gustarte
- RQ - 346 Especificaciones TecnicasDocumento8 páginasRQ - 346 Especificaciones TecnicasRub PerAún no hay calificaciones
- Presentación RIC 06 - Puestaatierra - 270521Documento33 páginasPresentación RIC 06 - Puestaatierra - 270521Erik Cristopher Sobarzo LazoAún no hay calificaciones
- Evaluacion Final - Escenario 8 - PRIMER BLOQUE-TEORICO - PRACTICO - VIRTUAL - FUNDAMENTOS DE FOTOGRAFÍA - (GRUPO B01)Documento20 páginasEvaluacion Final - Escenario 8 - PRIMER BLOQUE-TEORICO - PRACTICO - VIRTUAL - FUNDAMENTOS DE FOTOGRAFÍA - (GRUPO B01)Juliana HenaoAún no hay calificaciones
- Análisis de Vibración en Rodamientos en Equipos de Bajas RPM.Documento13 páginasAnálisis de Vibración en Rodamientos en Equipos de Bajas RPM.atorrez77Aún no hay calificaciones
- Cuadro Comparativo Modelos PedagogicosDocumento3 páginasCuadro Comparativo Modelos PedagogicosDiana Aguilar100% (1)
- Curso de VibracionesDocumento50 páginasCurso de Vibracionesatorrez77Aún no hay calificaciones
- RC29 - SM04 - TareaSM04 Tasa de Error 20-1BDocumento3 páginasRC29 - SM04 - TareaSM04 Tasa de Error 20-1BJoel Eduardo Cruz Meneses100% (1)
- Guía ChangemanDocumento24 páginasGuía ChangemanAldo Octavio Rodriguez Vera100% (1)
- Operacion Sistema (VP+RS) PR132457 - 2016Documento48 páginasOperacion Sistema (VP+RS) PR132457 - 2016atorrez77Aún no hay calificaciones
- CavitacionDocumento14 páginasCavitacionatorrez77Aún no hay calificaciones
- PresentaciónDocumento23 páginasPresentaciónatorrez77Aún no hay calificaciones
- Singtomas de VibDocumento53 páginasSingtomas de Vibatorrez77Aún no hay calificaciones
- Curso de VibracionesDocumento50 páginasCurso de Vibracionesatorrez77Aún no hay calificaciones
- Guía Básica de Taladros Magnéticos Y Cortadores AnularesDocumento16 páginasGuía Básica de Taladros Magnéticos Y Cortadores AnularesErlen PolancoAún no hay calificaciones
- 1049 - Plan-De-Desarrollo - Compromiso-Con-Responsabilidad-2016 - 2019Documento194 páginas1049 - Plan-De-Desarrollo - Compromiso-Con-Responsabilidad-2016 - 2019Diana Marcela Cespedes MottaAún no hay calificaciones
- Test Estilo de AprendizajeDocumento6 páginasTest Estilo de AprendizajeWily G̶u̶a̶y̶a̶c̶ L̶u̶c̶a̶n̶o̶Aún no hay calificaciones
- Presentación Capitolio Nacional de ColombiaDocumento10 páginasPresentación Capitolio Nacional de ColombiaSara Elifelet Castellanos MontenegroAún no hay calificaciones
- Ficha Técnica - Parex Decoflex Terminacion FinaDocumento2 páginasFicha Técnica - Parex Decoflex Terminacion FinaParexKlaukolAún no hay calificaciones
- Ladrillo Hueco 12Documento1 páginaLadrillo Hueco 12Abigail Santos PinedaAún no hay calificaciones
- Como Calcular El Capacitor de Un Motor MonofasicoDocumento6 páginasComo Calcular El Capacitor de Un Motor MonofasicoGerman Gabriel FernandezAún no hay calificaciones
- Concentrado 4to. Grado. Español TRIMESTRE IDocumento18 páginasConcentrado 4to. Grado. Español TRIMESTRE IAdriánAún no hay calificaciones
- Ensayo Manejo Seguro de Agroquimicos en Operaciones de Almacenamiento PDFDocumento26 páginasEnsayo Manejo Seguro de Agroquimicos en Operaciones de Almacenamiento PDFGustavo Adolfo AlvarezAún no hay calificaciones
- Actividad 1 Cuadro ComparativoDocumento3 páginasActividad 1 Cuadro ComparativoLauri guerreroAún no hay calificaciones
- PARADIGMASDocumento2 páginasPARADIGMASCinthya Lema Galarza0% (1)
- Resolucion IVA 320Documento17 páginasResolucion IVA 320jose martinezAún no hay calificaciones
- Resolucion de Ejercicios Electrotecnia-1Documento12 páginasResolucion de Ejercicios Electrotecnia-1MEIER JOSUE QUILLAHUAMAN HUAMANAún no hay calificaciones
- Paro Dinámico para Motores MonofásicosDocumento15 páginasParo Dinámico para Motores MonofásicosJorgeRangelAún no hay calificaciones
- Caso Red LobsterDocumento2 páginasCaso Red Lobsterjose fabianAún no hay calificaciones
- Apuntes Sobre Project ManageDocumento7 páginasApuntes Sobre Project ManageJulio TapiaAún no hay calificaciones
- Almacenamiento de Productos CongeladosDocumento3 páginasAlmacenamiento de Productos CongeladosMónica Del Rio ZuñigaAún no hay calificaciones
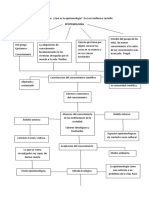
- Mapa Conceptual Del Texto-EpistemológiaDocumento2 páginasMapa Conceptual Del Texto-EpistemológiaLau Guz-Men50% (2)
- Inversion en Salud - AncashDocumento5 páginasInversion en Salud - AncashEdwin Filamir Yaipen FloresAún no hay calificaciones
- Vídeo Compuesto y Vídeo Por ComponentesDocumento3 páginasVídeo Compuesto y Vídeo Por ComponentesYair OreaAún no hay calificaciones
- 4 Integracion de Entidades Senales y Variables5Documento24 páginas4 Integracion de Entidades Senales y Variables5Camilo Andres RojasAún no hay calificaciones
- Mixtura Metodológica en La Investigación Educativa FinalDocumento12 páginasMixtura Metodológica en La Investigación Educativa FinaldocjorseAún no hay calificaciones
- ETICA COMPORTAMIENTO ETICO DEL INVESTIGADOR Y DEL TECNOLOGoDocumento3 páginasETICA COMPORTAMIENTO ETICO DEL INVESTIGADOR Y DEL TECNOLOGoalexAún no hay calificaciones
- Esquema - Perfil de Proyecto de IESTPDocumento8 páginasEsquema - Perfil de Proyecto de IESTPchascalucero14738Aún no hay calificaciones