También podría gustarte
- Avast Free AntivirusDocumento2 páginasAvast Free AntivirusRemigioAún no hay calificaciones
- Bumeran 1053787420 11528021342348254058Documento1 páginaBumeran 1053787420 11528021342348254058RemigioAún no hay calificaciones
- Link de Atención A EstudiantesDocumento3 páginasLink de Atención A EstudiantesRemigioAún no hay calificaciones
- Def ArchivoDocumento2 páginasDef ArchivoRemigioAún no hay calificaciones
- Resultados de La Utilización de Un Software para La Administración de Un Sistema Combinado en UnaDocumento11 páginasResultados de La Utilización de Un Software para La Administración de Un Sistema Combinado en UnaRemigioAún no hay calificaciones
- PROCEDIMIENTODEPOSTULACIONDocumento2 páginasPROCEDIMIENTODEPOSTULACIONRemigioAún no hay calificaciones
- Bienvenidx - Welcome - Willkommen - Gratissimum - Benvenuto ? PDFDocumento1 páginaBienvenidx - Welcome - Willkommen - Gratissimum - Benvenuto ? PDFRemigioAún no hay calificaciones
- Arquitectura Del Computador: Tema: Replicacion Mysql ClusterDocumento9 páginasArquitectura Del Computador: Tema: Replicacion Mysql ClusterRemigioAún no hay calificaciones
- Expresiones LambdaDocumento28 páginasExpresiones LambdaRemigioAún no hay calificaciones
- Lista de Retahílas Populares para NiñosDocumento47 páginasLista de Retahílas Populares para NiñosRemigioAún no hay calificaciones
- CAPÍTULO 3 - AltamiranoDocumento2 páginasCAPÍTULO 3 - AltamiranoRemigio87% (15)
- Instalacion y Configuracion Del Servidor de Copias de Seguridad Amanda y Sus Clientes - CompressDocumento26 páginasInstalacion y Configuracion Del Servidor de Copias de Seguridad Amanda y Sus Clientes - CompressRemigioAún no hay calificaciones
- HETEROGENEADocumento6 páginasHETEROGENEARemigioAún no hay calificaciones
- Amenaza de Los Nuevos Competidores: Rivalidad Entre Competidores CNT TV Cable DirectvDocumento3 páginasAmenaza de Los Nuevos Competidores: Rivalidad Entre Competidores CNT TV Cable DirectvRemigioAún no hay calificaciones
- Amenaza de Los Nuevos Competidores: Rivalidad Entre Competidores CNT TV Cable DirectvDocumento3 páginasAmenaza de Los Nuevos Competidores: Rivalidad Entre Competidores CNT TV Cable DirectvRemigioAún no hay calificaciones
- Reglamento Títulos Dra. Jazmuna SalazarDocumento29 páginasReglamento Títulos Dra. Jazmuna SalazarRemigioAún no hay calificaciones
- Capitulo3 5QuispeChristianDocumento3 páginasCapitulo3 5QuispeChristianRemigio67% (3)
- Los 2 Teoremas Fundamentales Del CálculoDocumento12 páginasLos 2 Teoremas Fundamentales Del CálculoEmilio Alejandro Ojeda CiauAún no hay calificaciones
- Unidad 1 - Integral Indefinida Tema 1.1 - Antiderivada Competencia 1Documento3 páginasUnidad 1 - Integral Indefinida Tema 1.1 - Antiderivada Competencia 1Arvizú Pérez AylinAún no hay calificaciones
- Algebra Abstracta - 3a Ed. - FraleighDocumento498 páginasAlgebra Abstracta - 3a Ed. - FraleighJUan GAbriel90% (21)
- AGAGSFDocumento10 páginasAGAGSFJhearlysAlejosManriqueAún no hay calificaciones
- Funciones GuiaDocumento5 páginasFunciones Guiaangie luciana yauli acostaAún no hay calificaciones
- Trabajo N°3 Pensamiento Lógico MatemáticoDocumento19 páginasTrabajo N°3 Pensamiento Lógico MatemáticoJeanjmarcos Marcos CantaroAún no hay calificaciones
- Guia 2 ConjuntoDocumento12 páginasGuia 2 ConjuntomjcarriAún no hay calificaciones
- Conectividad CondicionalDocumento20 páginasConectividad CondicionalBriana DE Los Angeles AlvaradoAún no hay calificaciones
- Las Funciones Trigonométricas InversasDocumento14 páginasLas Funciones Trigonométricas InversasPKRobertAún no hay calificaciones
- 15-05 Tablas de VerdadDocumento6 páginas15-05 Tablas de VerdadSamira PastorAún no hay calificaciones
- 6 1.5 Demostraciones1Documento31 páginas6 1.5 Demostraciones1MatematicaSilviaAún no hay calificaciones
- Algebra - Repaso InecuacionesDocumento6 páginasAlgebra - Repaso InecuacionesMarlf BaltazarAún no hay calificaciones
- Sesión 8Documento7 páginasSesión 8Jhonatan CVAún no hay calificaciones
- Acfrogb5ucdnnq1x 1tbiw723rpfyub1romgm5rphbvtxhfabfiilkre Aqa09 Rxlwzmjwoeofb G2oh2yfk8daiseug9x6t3xgqgnmtuv1wvlypo10vvfd4khobvahda1vqgfhmswfntgjpuurDocumento64 páginasAcfrogb5ucdnnq1x 1tbiw723rpfyub1romgm5rphbvtxhfabfiilkre Aqa09 Rxlwzmjwoeofb G2oh2yfk8daiseug9x6t3xgqgnmtuv1wvlypo10vvfd4khobvahda1vqgfhmswfntgjpuurAlfonso Luis Sarmiento NovoaAún no hay calificaciones
- Actividad 14 - Monotonía y Paridad. - Revisión Del IntentoDocumento5 páginasActividad 14 - Monotonía y Paridad. - Revisión Del IntentoMateo MejiaAún no hay calificaciones
- Trabajo Recoplicacion Edison MarinDocumento42 páginasTrabajo Recoplicacion Edison MarinDaniel MarinAún no hay calificaciones
- Autoevaluación - Conjuntos - Revisión Del IntentoDocumento9 páginasAutoevaluación - Conjuntos - Revisión Del Intentodaniel diazAún no hay calificaciones
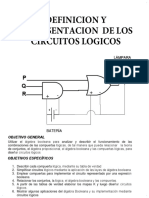
- Definicion y Representacion de Los Circuitos LogicosDocumento15 páginasDefinicion y Representacion de Los Circuitos LogicosAndreé Tello100% (1)
- Demostraciones de ConjuntosDocumento7 páginasDemostraciones de ConjuntosLeandro HristovAún no hay calificaciones
- Taller No 2 de CalculoDocumento31 páginasTaller No 2 de CalculoJhon Jairo Ramirez AmadorAún no hay calificaciones
- Proyecto 1 Inter 1Documento19 páginasProyecto 1 Inter 1Javier Estuardo Ordoñez SigalAún no hay calificaciones
- Leyes de Logica ProposicionalDocumento20 páginasLeyes de Logica ProposicionalGabriel Cisneros100% (1)
- Práctica I ADocumento4 páginasPráctica I ASergio PachecoAún no hay calificaciones
- Ilovepdf MergedDocumento5 páginasIlovepdf MergedMatematica Fisica EstadisticaAún no hay calificaciones
- Cá Lculo Proposicionál: ProposicionesDocumento16 páginasCá Lculo Proposicionál: ProposicionesadrianaAún no hay calificaciones
- Parcial 2 INVESTIGACION DE OPERACIONES SAN JOSEDocumento17 páginasParcial 2 INVESTIGACION DE OPERACIONES SAN JOSEIvan Arnulfo Buitrago LozanoAún no hay calificaciones
- Agentes LogicosDocumento14 páginasAgentes Logicoseduardo100% (1)
- Matematica1 - Semana 1Documento27 páginasMatematica1 - Semana 1JFGD 16Aún no hay calificaciones
- Método Simplex ArtificialDocumento9 páginasMétodo Simplex Artificialfercam24Aún no hay calificaciones
- Tercer Parcial Lógica JurídicaDocumento13 páginasTercer Parcial Lógica JurídicaSantiago WessAún no hay calificaciones