También podría gustarte
- UF0852 - Instalación y actualización de sistemas operativosDe EverandUF0852 - Instalación y actualización de sistemas operativosCalificación: 5 de 5 estrellas5/5 (1)
- UF0853 - Explotación de las funcionalidades del sistema microinformáticoDe EverandUF0853 - Explotación de las funcionalidades del sistema microinformáticoAún no hay calificaciones
- Unidad 1 Modelo de Arquitecturas de CómputoDocumento37 páginasUnidad 1 Modelo de Arquitecturas de CómputoRosario Ramírez Rios100% (1)
- Arquitecturas de ComputoDocumento34 páginasArquitecturas de ComputoStephanie Martinez100% (1)
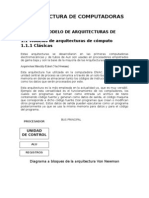
- Arquitectura de ComputadorasDocumento53 páginasArquitectura de Computadorastilsma100% (3)
- 04) Fraga, M. (1997)Documento14 páginas04) Fraga, M. (1997)Julio César Sosa Yeladaqui100% (1)
- Arquitectura de ComputadorasDocumento47 páginasArquitectura de ComputadorasRigoberto He HeAún no hay calificaciones
- Arquitectura Clásica de ComputadorasDocumento8 páginasArquitectura Clásica de ComputadorasCarlos Alejandro Medina CasillasAún no hay calificaciones
- Arquitectura de Computadoras IDocumento35 páginasArquitectura de Computadoras IJorge Díaz Ordás100% (1)
- Arquitectura de ComputadorasDocumento8 páginasArquitectura de ComputadorasSorel TorresAún no hay calificaciones
- Arquitectura de Computadoras - Alexis Emanuel Castillo ChuilDocumento7 páginasArquitectura de Computadoras - Alexis Emanuel Castillo ChuilAlexis Emanuel CastilloAún no hay calificaciones
- Antologia de Arquitectura de ComputadorasDocumento95 páginasAntologia de Arquitectura de ComputadorasCésar Vicente Morales Morales100% (1)
- Cuadro Comparativo ArquitecturasDocumento3 páginasCuadro Comparativo ArquitecturasAnonymous 1zH8A6cAún no hay calificaciones
- Arquitectura OBJETIVODocumento6 páginasArquitectura OBJETIVOArturo HernándezAún no hay calificaciones
- Arquitectura de La ComputadoraDocumento11 páginasArquitectura de La ComputadoraMiguel Angel Gomes SaraviaAún no hay calificaciones
- Antologia de Arquitectura de ComputadorasDocumento95 páginasAntologia de Arquitectura de ComputadorasCésar Vicente Morales MoralesAún no hay calificaciones
- 1.1 Modelo de Arquitecturas de CómputoDocumento18 páginas1.1 Modelo de Arquitecturas de CómputoJuan HernandezAún no hay calificaciones
- Actividad 1.1.1Documento14 páginasActividad 1.1.1luisAún no hay calificaciones
- Ensayo Sobre Modelos de Arquitectura de ComputadorasDocumento5 páginasEnsayo Sobre Modelos de Arquitectura de ComputadorasAldair Cruz BautistaAún no hay calificaciones
- Modelos de Arquitecturas de ComputadorasDocumento4 páginasModelos de Arquitecturas de ComputadorasJose MoralesAún no hay calificaciones
- Arquitectura AvanzadaDocumento8 páginasArquitectura AvanzadaMokewano PierceAún no hay calificaciones
- Plantilla Aqr ComputadorasDocumento4 páginasPlantilla Aqr Computadorasniki mejiaAún no hay calificaciones
- Guia 1 AC 2023Documento10 páginasGuia 1 AC 2023Lenin RamosAún no hay calificaciones
- Sistema ParaleloDocumento10 páginasSistema ParalelobrandonAún no hay calificaciones
- Arquitectura PipelineDocumento31 páginasArquitectura Pipelinemdl731Aún no hay calificaciones
- Capitulo 7 - Sistemas Multiprocesadores y ParalelosDocumento174 páginasCapitulo 7 - Sistemas Multiprocesadores y ParalelosLuis Angel ChoquehuancaAún no hay calificaciones
- Modelos de Arquitecturas de ComputadorasDocumento7 páginasModelos de Arquitecturas de ComputadorasAmsydarkJadeAún no hay calificaciones
- Ventajas y DesventajasDocumento3 páginasVentajas y DesventajasDiana Campos de UvarioAún no hay calificaciones
- Leccion 1 Arquitectura de Computadoras 2021 1Documento11 páginasLeccion 1 Arquitectura de Computadoras 2021 1Itinerario Formativo ProgramaciónAún no hay calificaciones
- Resumen Investigación 1.1 - Modelos de Arquitecturas de CómputoDocumento8 páginasResumen Investigación 1.1 - Modelos de Arquitecturas de CómputoluisAún no hay calificaciones
- Modelos de ArquitecturasDocumento8 páginasModelos de ArquitecturasMiguel Gutierrez SanchezAún no hay calificaciones
- Arquitectura de ComputadorasDocumento21 páginasArquitectura de ComputadorasThenayarb 21Aún no hay calificaciones
- Comparación Entre Microcontroladores y MicroprocesadoresDocumento7 páginasComparación Entre Microcontroladores y MicroprocesadorespabloAún no hay calificaciones
- Aic IntroDocumento14 páginasAic IntroAlexander Santos QuinchoAún no hay calificaciones
- Arquitectura de Computadoras Ensayo Equipo 1Documento21 páginasArquitectura de Computadoras Ensayo Equipo 1Mónica Aguilar57% (7)
- Curso MicrocontroladoresDocumento70 páginasCurso MicrocontroladoresFrancisco R. SouffleAún no hay calificaciones
- Enciso Luna Cristian Gerardo Isc 19400563Documento5 páginasEnciso Luna Cristian Gerardo Isc 19400563Cristian Gerardo Enciso LunaAún no hay calificaciones
- Arquitectura de ComputadorasDocumento8 páginasArquitectura de ComputadorasFrank TrujilloAún no hay calificaciones
- Tipos de ArquitecturasDocumento5 páginasTipos de ArquitecturasLiz Montes de OcaAún no hay calificaciones
- Arquitecturas AvanzadasDocumento8 páginasArquitecturas AvanzadasDIRECCION GENERAL DE OPERACION DE TRANSITOAún no hay calificaciones
- TEMA 03 PES 2023 - Componentes, Estructura y Funcionamiento de La Unidad Central de ProcesoDocumento14 páginasTEMA 03 PES 2023 - Componentes, Estructura y Funcionamiento de La Unidad Central de Procesoleandro.lopezAún no hay calificaciones
- 4 2 Tipos de Computacion ParalelaDocumento26 páginas4 2 Tipos de Computacion ParalelaJosue OrtizAún no hay calificaciones
- 04 Procesamiento en Paralelo PIPELINEDocumento23 páginas04 Procesamiento en Paralelo PIPELINEOmar GDAún no hay calificaciones
- ArquitecturamicroDocumento15 páginasArquitecturamicroRenny SerranoAún no hay calificaciones
- Dpso U1 A1 DaprDocumento6 páginasDpso U1 A1 DaprDaniel PinedaAún no hay calificaciones
- Apuntes Procesamiento VectorialDocumento23 páginasApuntes Procesamiento VectorialLidia RondonAún no hay calificaciones
- Arquitectura de Cpu Multiprocesamiento - Julio CesarDocumento12 páginasArquitectura de Cpu Multiprocesamiento - Julio CesarRazeck LMAún no hay calificaciones
- Arquitectura de Computadoras TemasDocumento53 páginasArquitectura de Computadoras TemasDaniel Toledo RebolledoAún no hay calificaciones
- Introducción Arquitectura de ComputadoresDocumento6 páginasIntroducción Arquitectura de ComputadorescarlosAún no hay calificaciones
- Análisis de Los ComponentesDocumento5 páginasAnálisis de Los ComponentesComandante Gomez Yeah100% (3)
- MODELO Von NeumannDocumento13 páginasMODELO Von Neumannalbertoolivas936100% (1)
- DAM MP01 Sistemas InformaticosDocumento174 páginasDAM MP01 Sistemas InformaticosJonay LorenzoAún no hay calificaciones
- Actividad 2ensayo Analisis de Los ComponentesDocumento7 páginasActividad 2ensayo Analisis de Los ComponentesFrank TrujilloAún no hay calificaciones
- 02 MicroprocesadoresDocumento58 páginas02 MicroprocesadoresJhonatan Ramirez GranadosAún no hay calificaciones
- Informe Von NeumannDocumento11 páginasInforme Von NeumannLuis Montenegro RodriguezAún no hay calificaciones
- Arquitectura de ComputadorasDocumento47 páginasArquitectura de ComputadorasMonica Toledo Villalobos100% (1)
- Modelo Arquitectura CDocumento3 páginasModelo Arquitectura CSairi Omar Tinoco OviedoAún no hay calificaciones
- CarreónHernández Actividad1T1Documento9 páginasCarreónHernández Actividad1T1Becks KamiAún no hay calificaciones
- Unidad2 Arroyo 8cm1Documento20 páginasUnidad2 Arroyo 8cm1Daniel VargasAún no hay calificaciones
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeDe EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeAún no hay calificaciones
- Ejercicios Normal Log Normal 2Documento1 páginaEjercicios Normal Log Normal 2Pedro Suarez0% (1)
- Manual Completo de AnclajesDocumento20 páginasManual Completo de AnclajesOscar iglesias alemánAún no hay calificaciones
- Cálculo y Seleccíon de RodamientosDocumento14 páginasCálculo y Seleccíon de RodamientosHerlis Esmith Mija TacureAún no hay calificaciones
- Escalonado Diseño en Acero y MaderaDocumento129 páginasEscalonado Diseño en Acero y MaderaGianny Daniela Torres TelloAún no hay calificaciones
- Boletín Marzo 2021Documento82 páginasBoletín Marzo 2021hectorquihuifloresAún no hay calificaciones
- Señales de TránsitoDocumento50 páginasSeñales de TránsitoCarlos Alberto Cárdenas Málaga100% (1)
- Diseño de ZapatasDocumento12 páginasDiseño de ZapatasingjuancyAún no hay calificaciones
- Xampp para LinuxDocumento7 páginasXampp para LinuxFrancisco GómezAún no hay calificaciones
- Humedad Chorizo KarlaDocumento5 páginasHumedad Chorizo KarlaJORGE ALEJANDRO SANTANA WILSONAún no hay calificaciones
- Expediente Técnico de PPPDocumento10 páginasExpediente Técnico de PPPJean Carlos Varas VásquezAún no hay calificaciones
- CARACTERIZACIÓN DE ARCILLAS Y PREPARACIÓN Revisar OkDocumento16 páginasCARACTERIZACIÓN DE ARCILLAS Y PREPARACIÓN Revisar Okkelly maribelAún no hay calificaciones
- Fcaw TR1Documento12 páginasFcaw TR1takeo Ramos chaconAún no hay calificaciones
- NCh0803-2003-Paneles - Ensayo de FlexionDocumento21 páginasNCh0803-2003-Paneles - Ensayo de Flexionsf1553100% (3)
- Constancia de No AdeudoDocumento1 páginaConstancia de No AdeudoVanessa GuzmanAún no hay calificaciones
- Prueba Fotosintesis 6° 2017Documento4 páginasPrueba Fotosintesis 6° 2017Genoveva IbarraAún no hay calificaciones
- Unidad 01. Arte GriegoDocumento325 páginasUnidad 01. Arte GriegoangelaAún no hay calificaciones
- Tesis El PeñonDocumento49 páginasTesis El PeñonJuanSebastianBenavidesAún no hay calificaciones
- HornosDocumento22 páginasHornosalbermillan69Aún no hay calificaciones
- Practica 3 Diseño de MaquinasDocumento14 páginasPractica 3 Diseño de MaquinasJosue Fernando Galindo MedinaAún no hay calificaciones
- Revisado de HDSP Oxido NitrosoDocumento8 páginasRevisado de HDSP Oxido NitrosoOrlando ChaparroAún no hay calificaciones
- Practica 1 Perfil SueloDocumento1 páginaPractica 1 Perfil SueloJuan Manuel Salazar MataAún no hay calificaciones
- Puno Acora CapallaDocumento142 páginasPuno Acora CapallaClaudioOrdoñezAún no hay calificaciones
- Buenas Practicas de LaboratorioDocumento11 páginasBuenas Practicas de LaboratorioClaudia Naomi Ventura OrtizAún no hay calificaciones
- Investigacion de OperDocumento3 páginasInvestigacion de OperBrayan Enrique Prieto YagualAún no hay calificaciones
- Grafico Esfuerzo-DeformacionDocumento4 páginasGrafico Esfuerzo-DeformacionOtto Ruck PolancoAún no hay calificaciones
- Analisis Explosion Cisterna GLPDocumento11 páginasAnalisis Explosion Cisterna GLPEnescon SacAún no hay calificaciones
- Clase 3Documento116 páginasClase 3Juan Carlos Bobadilla RodriguezAún no hay calificaciones
- Frank Bunker GilbrethDocumento13 páginasFrank Bunker Gilbrethayce0407Aún no hay calificaciones
- Specs CX130CDocumento6 páginasSpecs CX130CRonald Mario Kupa AnticonaAún no hay calificaciones
- Brochure EsavDoc DigitalDocumento8 páginasBrochure EsavDoc DigitalCarlos ArceAún no hay calificaciones