También podría gustarte
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- Curso básico de teoría de númerosDe EverandCurso básico de teoría de númerosCalificación: 5 de 5 estrellas5/5 (2)
- Fases de Un Proyecto ElectricoDocumento5 páginasFases de Un Proyecto ElectricoRicardo Caceres A100% (2)
- Teoría de cuerpos y teoría de GaloisDe EverandTeoría de cuerpos y teoría de GaloisCalificación: 5 de 5 estrellas5/5 (1)
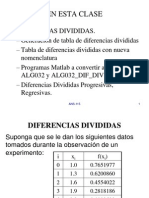
- InterpolacionDocumento40 páginasInterpolacionJesus Max HdezAún no hay calificaciones
- Cuestionario 2 - Responda La Segunda Evaluación Parcial Sobre Trastornos Del Sueño-VigiliaDocumento6 páginasCuestionario 2 - Responda La Segunda Evaluación Parcial Sobre Trastornos Del Sueño-VigiliaCristianEgasAún no hay calificaciones
- Formulario de Métodos Numéricos 2PDocumento13 páginasFormulario de Métodos Numéricos 2PJordan AyalaAún no hay calificaciones
- Rubrica Producto Final CancioneroDocumento1 páginaRubrica Producto Final Cancioneroapi-242369460100% (1)
- Interpolacion (Metodos Numericos)Documento24 páginasInterpolacion (Metodos Numericos)Dante RojasAún no hay calificaciones
- Apuntes Metodos Numericos Tercera ParteDocumento38 páginasApuntes Metodos Numericos Tercera ParteIsrAel Perez TrejoAún no hay calificaciones
- InterpolacionDocumento22 páginasInterpolacionEd Cornejo MaytaAún no hay calificaciones
- Computación II Unidad IDocumento72 páginasComputación II Unidad IRoberto Alegre HuamanchumoAún no hay calificaciones
- Interpolación Analsis NúméricoDocumento29 páginasInterpolación Analsis NúméricoNelsonJoseAAún no hay calificaciones
- ADiferenciacion e IntegracionNumericaDocumento23 páginasADiferenciacion e IntegracionNumericaJose Luis Layme AlvareszAún no hay calificaciones
- InterpolacionDocumento20 páginasInterpolacionMario Montes de OcaAún no hay calificaciones
- Formula de Interpolación de LagrangeDocumento7 páginasFormula de Interpolación de LagrangeguimlasterAún no hay calificaciones
- Tema 3 Ajuste de CurvasDocumento20 páginasTema 3 Ajuste de CurvasIbra HigueraAún no hay calificaciones
- Notas C2 1Documento34 páginasNotas C2 1Isaac López LópezAún no hay calificaciones
- Deducción de La Formula Hasta 6to OrdenDocumento13 páginasDeducción de La Formula Hasta 6to OrdenJuan PlazaAún no hay calificaciones
- Interpolacion NumericaDocumento6 páginasInterpolacion NumericaFransesco CalabreseAún no hay calificaciones
- Interpol Newton GregoryDocumento12 páginasInterpol Newton GregoryCristian Salazar EspinozaAún no hay calificaciones
- INTERPOLACIÓNDocumento19 páginasINTERPOLACIÓNAmIn20122Aún no hay calificaciones
- Interpol Ac I OnDocumento36 páginasInterpol Ac I OnGonzalo Salvador GuevaraAún no hay calificaciones
- InterpolacionDocumento20 páginasInterpolacionSergio Adrian SaavedraAún no hay calificaciones
- Teorema Del Valor Medio Ponderado - Cap5Documento43 páginasTeorema Del Valor Medio Ponderado - Cap5OchosNoveAún no hay calificaciones
- Lagrange, Dif Divididas y NevilleDocumento22 páginasLagrange, Dif Divididas y NevilleMari SolecitoAún no hay calificaciones
- 1 Lagrange PDFDocumento8 páginas1 Lagrange PDFmariansoto1Aún no hay calificaciones
- Ejercicios UnidadIII PDFDocumento7 páginasEjercicios UnidadIII PDFMiguel BotelloAún no hay calificaciones
- INTERPOLACIÓNDocumento15 páginasINTERPOLACIÓNJorge Andres Olivares FunesAún no hay calificaciones
- Listado4 Interpolacion Parte IDocumento2 páginasListado4 Interpolacion Parte IDarien RiquelmeAún no hay calificaciones
- MNIe IDocumento20 páginasMNIe IJean Pierre NeyraAún no hay calificaciones
- Taller #4 InterpolacionDocumento5 páginasTaller #4 InterpolacionCarlos TabordaAún no hay calificaciones
- 5 Interpolacion - Diferenciacion e Integracion NumericaDocumento21 páginas5 Interpolacion - Diferenciacion e Integracion NumericaMyller Cordova AlejosAún no hay calificaciones
- Ejercicio 1 Calculo TP 6Documento14 páginasEjercicio 1 Calculo TP 6Abi YamiAún no hay calificaciones
- Taller 4 - Metodos NumericosDocumento4 páginasTaller 4 - Metodos NumericosAlberto Lagos100% (1)
- Capítulo 7 - La DerivadaDocumento16 páginasCapítulo 7 - La DerivadaDaniel FernándezAún no hay calificaciones
- CDI CapIIIDocumento98 páginasCDI CapIIIJosé Luis LMAún no hay calificaciones
- Sesion 2 - Interpolacion Diferenciable y Polinomios Ortogonales (Matlab)Documento38 páginasSesion 2 - Interpolacion Diferenciable y Polinomios Ortogonales (Matlab)Hernan Caviedes ManzanoAún no hay calificaciones
- Semana 3 Parte 2Documento16 páginasSemana 3 Parte 2Juan GutierrezAún no hay calificaciones
- Interpolacion de NewtonDocumento5 páginasInterpolacion de NewtonRodrigo Vallejos VergaraAún no hay calificaciones
- Interpolacion Metodos NumericosDocumento17 páginasInterpolacion Metodos NumericosMakarena Vega ArizmendiAún no hay calificaciones
- Sesión 7 Interpolación Diferenciable - PythonDocumento8 páginasSesión 7 Interpolación Diferenciable - PythonjoseAún no hay calificaciones
- Tarea No. 3Documento2 páginasTarea No. 3José Antonio Alfaro MaldonadoAún no hay calificaciones
- MetodosNumericos-Derivacion NumericaDocumento50 páginasMetodosNumericos-Derivacion Numericamanu1jhcAún no hay calificaciones
- InterpolaciónDocumento21 páginasInterpolaciónLuz CisnerosAún no hay calificaciones
- Introducción A Octave Parte 2Documento5 páginasIntroducción A Octave Parte 2luis yoAún no hay calificaciones
- Guia 4Documento3 páginasGuia 4MLS DRAún no hay calificaciones
- Lab 4Documento3 páginasLab 4Alvaro Opazo RuizAún no hay calificaciones
- Guia 8 Derivacion e Integracion NumericaDocumento10 páginasGuia 8 Derivacion e Integracion NumericaCheko KillesAún no hay calificaciones
- Semestral MétodosDocumento40 páginasSemestral MétodosMarkelys VargasAún no hay calificaciones
- Metodo de Newton RaphsonDocumento11 páginasMetodo de Newton RaphsonDR. JUAN JESÚS SORIA QUIJAITE50% (2)
- Grupo 4 - Métodos NuméricosDocumento34 páginasGrupo 4 - Métodos NuméricosBryanVegaAún no hay calificaciones
- Metodo de NevilleDocumento3 páginasMetodo de NevilleGerardoAún no hay calificaciones
- Polinomio Interpolador de NewtonDocumento9 páginasPolinomio Interpolador de NewtonShiroDragonAún no hay calificaciones
- Derivada de FuncionesDocumento13 páginasDerivada de FuncionesJavier VallenillaAún no hay calificaciones
- Interpolacion Con SplinesDocumento13 páginasInterpolacion Con SplinesJessica Soliz CatariAún no hay calificaciones
- Algoritmo de dibujo lineal: Dominar técnicas para la representación de imágenes de precisiónDe EverandAlgoritmo de dibujo lineal: Dominar técnicas para la representación de imágenes de precisiónAún no hay calificaciones
- Folleto Higiene PosturalDocumento1 páginaFolleto Higiene PosturalAYG GestionAún no hay calificaciones
- Procesos - Ejemplo1 - Ejercicio.Documento5 páginasProcesos - Ejemplo1 - Ejercicio.JULIAN DAVID CETINA MORENOAún no hay calificaciones
- Ficha Tecnica FuminatDocumento3 páginasFicha Tecnica FuminatJUDA0000Aún no hay calificaciones
- Zonificacion y Codificacion CuencasDocumento76 páginasZonificacion y Codificacion Cuencasivan890720Aún no hay calificaciones
- Practica No. 3 Tablas DinamicasDocumento10 páginasPractica No. 3 Tablas DinamicasandreskwaoAún no hay calificaciones
- Para WuilmaDocumento6 páginasPara Wuilmawuilmaira vasquezAún no hay calificaciones
- Cuadro ComparativoDocumento5 páginasCuadro ComparativoGalilea TristanAún no hay calificaciones
- Sexto Grado Salud Clase 27Documento5 páginasSexto Grado Salud Clase 27Tania Monserrat GimenezAún no hay calificaciones
- Control de La AcusacionDocumento16 páginasControl de La AcusacionjhonatanxanderAún no hay calificaciones
- DM1 - DMA1 - DMA2 Montaje Y MantenimientoDocumento12 páginasDM1 - DMA1 - DMA2 Montaje Y MantenimientoDAVIDAún no hay calificaciones
- Ficha - ESCALA ABREVIDA DE NELSON ORTIZDocumento2 páginasFicha - ESCALA ABREVIDA DE NELSON ORTIZAbigail PijuanaAún no hay calificaciones
- Material de Estudio de Derecho AgrarioDocumento43 páginasMaterial de Estudio de Derecho AgrarioDario MatuteAún no hay calificaciones
- MONOGRAFIADocumento38 páginasMONOGRAFIAAlan CondoriAún no hay calificaciones
- Cap10 MonopolioDocumento58 páginasCap10 MonopolioSarahi GómezAún no hay calificaciones
- Guía de Retroalimentación Artes Visuales: "Aprendemos Con Excelencia en La Confianza y El Afecto"Documento5 páginasGuía de Retroalimentación Artes Visuales: "Aprendemos Con Excelencia en La Confianza y El Afecto"MarcelaAún no hay calificaciones
- Radiografía de La Detección y El Tratamiento Del Trastorno Depresivo en El Sistema de Salud Público Español 2022Documento10 páginasRadiografía de La Detección y El Tratamiento Del Trastorno Depresivo en El Sistema de Salud Público Español 2022Jenny MoyanoAún no hay calificaciones
- Folleto Información (Cubipod) PDFDocumento6 páginasFolleto Información (Cubipod) PDFOier Juez UriagerekaAún no hay calificaciones
- Examen G22Documento4 páginasExamen G22DavidAún no hay calificaciones
- Func Pol CLASEDocumento7 páginasFunc Pol CLASEPatricio CardenasAún no hay calificaciones
- Ficha de Registro de Sitios Con Arte Rupestre y Piedras Con CúpulasDocumento6 páginasFicha de Registro de Sitios Con Arte Rupestre y Piedras Con CúpulasMario A. Ramos0% (1)
- Qué Es Una Disciplina ClínicaDocumento2 páginasQué Es Una Disciplina ClínicaresidentesccvpAún no hay calificaciones
- Plan de CierreDocumento58 páginasPlan de CierreXavier Medina Veintimilla100% (1)
- De VIDO - Pedido de DESAFUERO - Expdte 0343-OV-2017 DiputadosDocumento268 páginasDe VIDO - Pedido de DESAFUERO - Expdte 0343-OV-2017 DiputadosDiario de CuyoAún no hay calificaciones
- Estudio Preinversion Tilapia GarzónDocumento60 páginasEstudio Preinversion Tilapia Garzónsociology expressAún no hay calificaciones
- RM 2022 F4 - Neurología - 113727Documento37 páginasRM 2022 F4 - Neurología - 113727Sergio RodrigoAún no hay calificaciones
- Fuerza Motriz de Protones y Síntesis de AtpDocumento3 páginasFuerza Motriz de Protones y Síntesis de AtpDaniel Mateo Rangel ResendezAún no hay calificaciones
- 5 Matematica IIDocumento130 páginas5 Matematica IIAngelo Garcia100% (1)